一种基于改进最远点采样的点云数据处理方法
本发明涉及一般的图像数据处理或产生,具体涉及一种基于改进最远点采样的点云数据处理方法。
背景技术:
1、当前,三维扫描仪等设备的普及和数据存储技术的不断发展使得点云数据的规模越来越大。在云计算和物联网等领域,许多数据都是以点云形式存在,大规模点云数据的处理已成为一个重要的任务。
2、采样算法成为大规模点云数据处理中的一个重要环节。点云数据的应用需要对数据进行一定的预处理以提取所需的特征,包括特征点、表面法向量、曲率等。在这些预处理步骤中,采样算法能够对点云数据进行维数约减,并提取最具代表性的点集,这有助于降低计算复杂度,提高计算效率。传统的点云采样算法主要基于密集采样,即从密集的点云数据中均匀采样。然而,在处理大规模点云数据时,密集采样算法存在计算和存储上的瓶颈,难以满足大规模数据处理的要求。
3、最远点采样(farthest point sampling,fps)是一个基本的点云采样算法,其被广泛应用于点云分割、识别、配准、重建等领域以及各类三维物体检测算法。它可以用来从点云中选取一些最具代表性的点,用于后续的计算。在大规模点云数据处理中进行采样可以大大降低计算复杂度和存储需求。相比之下,基于最远点采样的算法具有较低的复杂度和存储需求,而且能够抽出数据中最具代表性的点,在点云数据处理中得到了广泛应用。在三维物体识别、场景重建、激光雷达数据处理等领域中,使用基于最远点采样的算法能够获得非常良好的效果,表现优异。同时,这种算法也非常灵活和易于实现,可以应用于各种点云数据处理任务。因此,最远点采样算法成为了当前点云采样中的一种常见技术之一。但是,最远点采样(fps)只能控制采样点数,不能控制平均点间距,在此背景下,会产生采样点分布不均匀,导致整体特征不能完整表达。
4、因此,现需要一种在保留目标整体特征的前提下,采样后点云分布均匀的基于改进最远点采样的点云数据处理方法。
技术实现思路
1、本发明的主要目的在于提供一种基于改进最远点采样的点云数据处理方法,以解决现有技术中对点云数据进行采样时,不能同时兼顾保留目标整体特征和采样后点云分布均匀的问题。
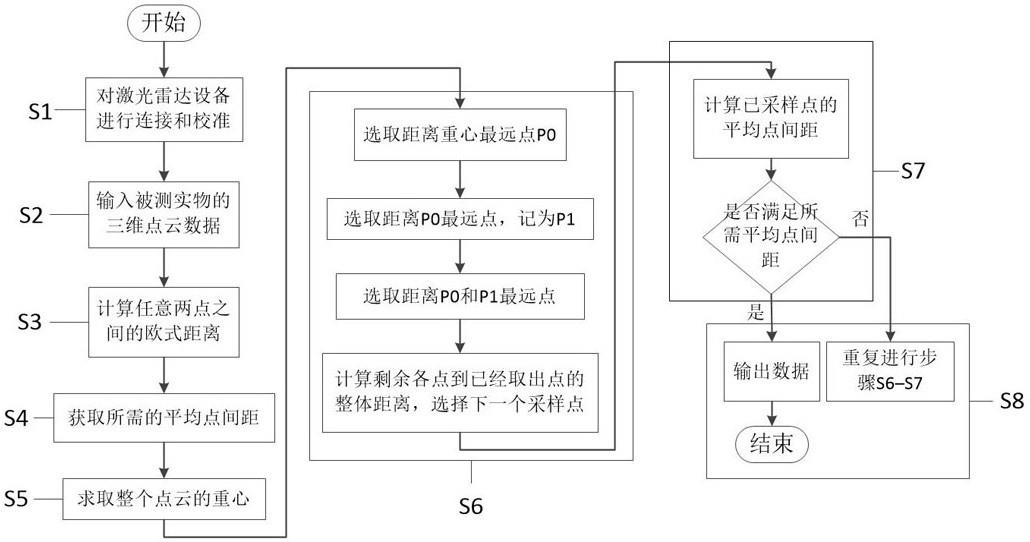
2、为实现上述目的,本发明提供了一种基于改进最远点采样的点云数据处理方法,包括如下步骤:s1,对激光雷达设备进行连接和校准;s2,将从激光雷达采集的三维点云数据输入到计算机中;s3,对于点云数据中的任意两个点,在激光雷达坐标系中根据欧式距离公式计算两点之间的欧式距离;s4,根据实际需求,获取所需要的平均点间距;s5,通过对所有点云数据的坐标值求平均得到整个点云的重心点,并将重心点作为第一个采样点;s6,遍历所有点,计算每个点到已经选取的采样点的距离,并选取距离最远的点作为新的采样点;s7,通过步骤s6选取出四个点p0,p1,p2,p3,并利用最近邻点计算平均点间距,并与所需平均点间距进行比较,判断是否满足所需平均点间距; s8,若满足所需平均点间距则退出循环,输出经处理后的被测实物的三维点云数据,若不满足则重复进行步骤s6–s7,直到满足所需平均点间距。
3、进一步地,步骤s1具体包括如下步骤:s1.1,对被测实物进行清理,以确保点云数据的准确性;s1.2,利用夹具或支架将被测实物固定在激光雷达坐标系中;s1.3,根据实际需要设置激光雷达的扫描参数,包括:扫描角度、分辨率。
4、进一步地,步骤s2具体为:使用激光扫描仪测量实物,获得被测实物的三维点云数据,以扫描仪为中心,依据右手系原则建立笛卡尔坐标系即激光扫描仪坐标系,以激光发射中心为原点,x轴指向激光扫描仪扫描的起始方向,z轴垂直于激光扫描仪水平旋转平面,y轴垂直于xoz平面,依据被测实物反射回的激光信号,表达出其在激光雷达坐标系中的位置。
5、进一步地,步骤s3具体为:计算在激光雷达坐标系中的任意两点之间的欧式距离,两点坐标分别为和,两点之间的欧式距离利用公式(1)计算。
6、 (1)。
7、进一步地,步骤s5具体为:利用公式(2)计算某被测实物点的点云集合的重心点,其中为各个被测实物点,每个点有三个维度的坐标,即x、y、z三个方位元素在激光雷达坐标系中的坐标值。
8、 (2)
9、其中,表示在x轴方向上的重心位置,表示在y轴方向上的重心位置,在表示在z轴方向上的重心位置,共有n个点,代表点的x轴坐标;代表点的y轴坐标;代表点的z轴坐标。
10、进一步地,步骤s6具体包括如下步骤:s6.1,利用公式(1)计算重心点距离点云中其他各个点的欧式距离,选取距离重心点最远的点作为起始点,记作p0;s6.2,计算除p0点外,所有点到p0点的欧氏距离,选取除p0点外,剩余的所有点中距离p0最远的点,记为p1;s6.3,对于除了p0,p1以外剩余的每个点,分别计算到p0和p1的距离,比较某一点到p0,p1的距离,选取最短的距离作为该点到p0,p1的距离,选择距离p0,p1最大的那个点,记为p2;s6.4,重复步骤s6.3继续遍历所有点,对于除了p0,p1,p2以外剩余的每个点,分别计算到p0,p1和p2的距离,比较某一点到p0,p1,p2的距离,选取最短的距离作为该点到p0,p1,p2的距离,选择距离p0,p1,p2最大的那个点,记为p3。
11、进一步地,步骤s7的利用最近邻点计算平均点间距的方法具体为:对选取出的四个点p0,p1,p2,p3,寻找每个点的最近邻点,并计算其到最近邻点的距离,对四个距离求和取平均值,求取得到的值即为平均点间距,上述过程用公式(3)表示为:
12、 (3)
13、在公式(3)中为四个点p0,p1,p2,p3的平均点间距,为各点至其最近邻点的距离该距离通过公式(1)的欧氏距离计算得到。
14、本发明具有如下有益效果:
15、本发明通过对采样得到的点进行逐次平均点间距求取,并与所需平均点间距进行比较,来保证采样后的点云数据在保留点云外部轮廓特征同时还充分考虑了点云平均点间距在采样中可控性,从而避免了现有的采样方法在对整个点云数据进行采样时时,无法同时兼顾点云平均点间距与物体外部轮廓特征完整的问题。
技术特征:
1.一种基于改进最远点采样的点云数据处理方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于改进最远点采样的点云数据处理方法,其特征在于,步骤s1具体包括如下步骤:
3.根据权利要求1所述的一种基于改进最远点采样的点云数据处理方法,其特征在于,步骤s2具体为:使用激光扫描仪测量实物,获得被测实物的三维点云数据,以扫描仪为中心,依据右手系原则建立笛卡尔坐标系即激光扫描仪坐标系,以激光发射中心为原点,x轴指向激光扫描仪扫描的起始方向,z轴垂直于激光扫描仪水平旋转平面,y轴垂直于xoz平面,依据被测实物反射回的激光信号,表达出其在激光雷达坐标系中的位置。
4.根据权利要求1所述的一种基于改进最远点采样的点云数据处理方法,其特征在于,步骤s3具体为:计算在激光雷达坐标系中的任意两点之间的欧式距离,两点坐标分别为和,两点之间的欧式距离利用公式(1)计算,
5.根据权利要求1所述的一种基于改进最远点采样的点云数据处理方法,其特征在于,步骤s5具体为:利用公式(2)计算某被测实物点的点云集合的重心点,其中为各个被测实物点,每个点有三个维度的坐标,即x、y、z三个方位元素在激光雷达坐标系中的坐标值;
6.根据权利要求1所述的一种基于改进最远点采样的点云数据处理方法,其特征在于,步骤s6具体包括如下步骤:
7.根据权利要求1所述的一种基于改进最远点采样的点云数据处理方法,其特征在于,步骤s7的利用最近邻点计算平均点间距的方法具体为:对选取出的四个点p0,p1,p2,p3,寻找每个点的最近邻点,并计算其到最近邻点的距离,对四个距离求和取平均值,求取得到的值即为平均点间距,上述过程用公式(3)表示为:
技术总结
本发明提供了一种基于改进最远点采样的点云数据处理方法,涉及一般的图像数据处理或产生技术领域,包括如下步骤:对激光雷达设备进行连接和校准;将从激光雷达采集的三维点云数据输入到计算机中;在激光雷达坐标系中根据欧式距离公式计算两点之间的欧式距离;获取所需要的平均点间距;将重心点作为第一个采样点;遍历所有点,计算每个点到已经选取的采样点的距离,并选取距离最远的点作为新的采样点;利用最近邻点计算平均点间距,并与所需平均点间距进行比较;若满足要求则退出循环,不满足则继续循环。本发明的技术方案克服现有技术中的最远点采样因点数约束导致的采样后点云的分布不均匀引起的整体特征缺失问题。
技术研发人员:田茂义,李文君
受保护的技术使用者:山东科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!