目标检测方法、装置、计算机设备及存储介质与流程
本发明涉及计算机视觉领域,具体涉及目标检测方法、装置、计算机设备及存储介质。
背景技术:
1、随着深度学习技术和大数据技术的发展,以及计算机计算能力的提高,计算机视觉技术已成为近年来最火热的先进技术之一,被广泛应用于智能终端、移动互联网应用、金融、电信、汽车、家居、教育等行业。基于计算机视觉技术进行行人、宠物或行李等目标的检测准确率在不断提高,但是在实际应用环境中,由于存在光照、地面环境、行人衣物等多种因素,会对实际的目标检测结果产生较大影响。
2、相关技术中通常是直接采用基于深度卷积网络的目标检测方法针对当前时刻的单帧视频影像进行检测,但是由于存在多种影响因素,可能会出现错检、漏检等情况,检测的准确率较低。
技术实现思路
1、有鉴于此,本发明实施例提供了一种目标检测方法、装置、计算机设备及存储介质,以解决目标检测准确率不高的问题。
2、第一方面,本发明实施例提供了一种目标检测方法,所述方法包括:
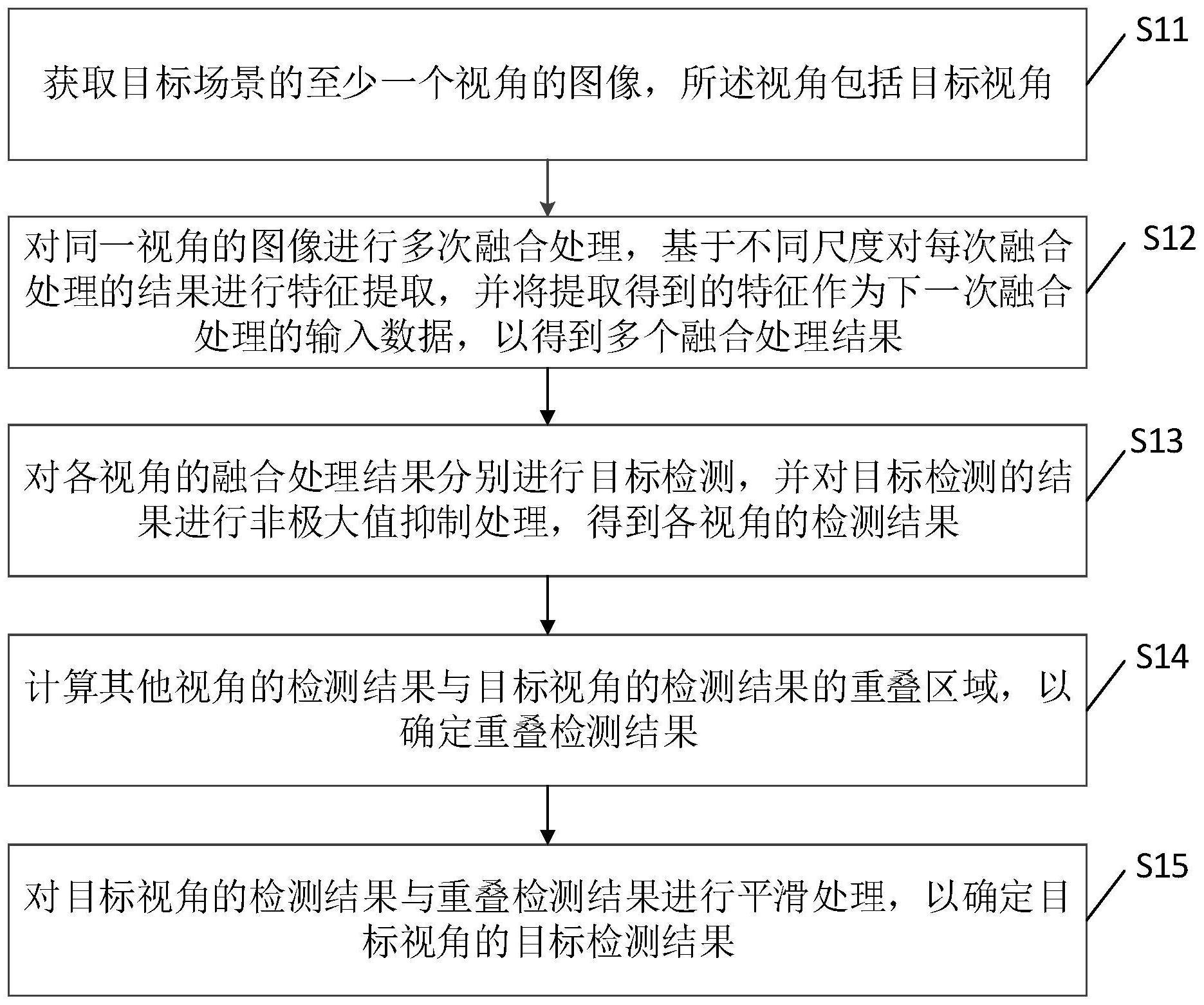
3、获取目标场景的至少一个视角的图像,所述视角包括目标视角;
4、对同一视角的图像进行多次融合处理,基于不同尺度对每次融合处理的结果进行特征提取,并将提取得到的特征作为下一次融合处理的输入数据,以得到多个融合处理结果;
5、对各视角的融合处理结果分别进行目标检测,并对目标检测的结果进行非极大值抑制处理,得到各视角的检测结果;
6、计算其他视角的检测结果与目标视角的检测结果的重叠区域,以确定重叠检测结果;
7、对所述目标视角的检测结果与所述重叠检测结果进行平滑处理,以确定目标视角的目标检测结果。
8、本实施例提供的目标检测方法,获取至少一个视角的图像,对于同一视角的图像进行多次融合处理,对每一次融合处理得到的结果进行特征提取,作为下一次融合处理的输入数据,分别对多次融合处理的结果进行目标检测以及非极大值抑制处理,得到每个视角的检测结果,计算目标视角的检测结果与其他视角的检测结果的重叠区域,基于重叠检测结果以及目标视角的检测结果确定目标视角的目标检测结果。本方法不局限采用一个视角的图像,且图像不限于某一时刻的图像,提升目标检测的准确性。
9、在一些实施方式中,所述获取目标场景的至少一个视角的图像,包括:
10、分别获取目标场景各视角对应的当前时刻图像、背景图像、当前时刻之前预设时间段内间隔预设第一周期的至少一帧图像以及当前时刻之前预设时间段内间隔预设第二周期的至少一帧图像,所述预设第二周期小于预设第一周期,所述背景图像不包含目标。
11、在一些实施方式中,当多次融合处理包括三次融合处理,所述对同一视角的图像进行多次融合处理,基于不同尺度对每次融合处理的结果进行特征提取,并将提取得到的特征作为下一次融合处理的输入数据,以得到多个融合处理结果,包括:
12、基于不同分辨率提取目标场景在同一视角下的第一目标特征、第二目标特征和第三目标特征;
13、对第一目标特征进行融合,得到第一融合处理结果;
14、基于第二目标特征对第一融合处理结果进行特征提取,得到第一提取特征,将所述第一提取特征与所述第二目标特征进行融合,得到第二融合处理结果;
15、基于第三目标特征对第二融合处理结果进行特征提取,得到第二提取特征,将所述第二提取特征与所述第三目标特征进行融合,得到第三融合处理结果。
16、在一些实施方式中,所述对各视角的融合处理结果分别进行目标检测,并对目标检测的结果进行非极大值抑制处理,得到各视角的检测结果,包括:
17、分别将同一视角对应的所述第一融合处理结果、第二融合处理结果和第三融合处理结果输入预设检测头,得到不同尺度的检测结果;
18、对不同尺度的检测结果进行非极大值抑制处理,以确定各视角的检测结果。
19、在一些实施方式中,所述计算其他视角的检测结果与目标视角的检测结果的重叠区域,以确定重叠检测结果,包括:
20、将其他视角的检测结果转换至目标视角的检测结果的坐标系;
21、基于转换后的检测结果计算其他视角与目标视角的重叠区域,以确定重叠检测结果。
22、在一些实施方式中,所述将其他视角的检测结果转换至目标视角的检测结果的坐标系,包括:
23、基于同一时刻的其他视角的图像与目标视角的图像,计算其他视角的图像对应的摄像头相对于目标视角对应的目标摄像头的位置;
24、基于所述其他视角的图像对应的摄像头相对于目标视角对应的目标摄像头的位置以及所述其他视角的检测结果,将所述其他视角的检测结果转换至目标视角的检测结果的坐标系。
25、在一些实施方式中,所述对所述目标视角的检测结果与所述重叠检测结果进行平滑处理,以确定目标视角的目标检测结果,包括:
26、建立所述目标视角的检测结果中每个目标的时空通道;
27、基于所述重叠检测结果对所述时空通道进行平滑处理,去除所述检测结果中的假阳性结果和假阴性结果,以确定目标视角的目标检测结果。
28、第二方面,本发明实施例提供了一种目标检测装置,装置包括:
29、图像获取模块,用于获取目标场景的至少一个视角的图像,所述视角包括目标视角;
30、融合处理模块,用于对同一视角的图像进行多次融合处理,基于不同尺度对每次融合处理的结果进行特征提取,并将提取得到的特征作为下一次融合处理的输入数据,以得到多个融合处理结果;
31、抑制处理模块,用于对各视角的融合处理结果分别进行目标检测,并对目标检测的结果进行非极大值抑制处理,得到各视角的检测结果;
32、重叠区域计算模块,用于计算其他视角的检测结果与目标视角的检测结果的重叠区域,以确定重叠检测结果;
33、平滑处理模块,用于对所述目标视角的检测结果与所述重叠检测结果进行平滑处理,以确定目标视角的目标检测结果。
34、第三方面,本发明实施例提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的目标检测方法。
35、第四方面,本发明实施例提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的目标检测方法。
技术特征:
1.一种目标检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取目标场景的至少一个视角的图像,包括:
3.根据权利要求1所述的方法,其特征在于,当多次融合处理包括三次融合处理,所述对同一视角的图像进行多次融合处理,基于不同尺度对每次融合处理的结果进行特征提取,并将提取得到的特征作为下一次融合处理的输入数据,以得到多个融合处理结果,包括:
4.根据权利要求3所述的方法,其特征在于,所述对各视角的融合处理结果分别进行目标检测,并对目标检测的结果进行非极大值抑制处理,得到各视角的检测结果,包括:
5.根据权利要求1所述的方法,其特征在于,所述计算其他视角的检测结果与目标视角的检测结果的重叠区域,以确定重叠检测结果,包括:
6.根据权利要求5所述的方法,其特征在于,所述将其他视角的检测结果转换至目标视角的检测结果的坐标系,包括:
7.根据权利要求1所述的方法,其特征在于,所述对所述目标视角的检测结果与所述重叠检测结果进行平滑处理,以确定目标视角的目标检测结果,包括:
8.一种目标检测装置,其特征在于,所述装置包括:
9.一种计算机设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机指令,所述计算机指令用于使计算机执行权利要求1至7中任一项所述的目标检测方法。
技术总结
本发明涉及计算机视觉技术领域,公开了目标检测方法、装置、计算机设备及存储介质,包括:获取至少一个视角的图像,对于同一视角的图像进行多次融合处理,对每一次融合处理得到的结果进行特征提取,作为下一次融合处理的输入数据,分别对多次融合处理的结果进行目标检测以及非极大值抑制处理,得到每个视角的检测结果,计算目标视角的检测结果与其他视角的检测结果的重叠区域,基于重叠检测结果以及目标视角的检测结果确定目标视角的目标检测结果。本方法不局限采用一个视角的图像,且图像不限于某一时刻的图像,提升目标检测的准确性。
技术研发人员:张鹏飞,梁礼强,赵惠,苏江
受保护的技术使用者:暗物智能科技(广州)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!