一种变电站外飘挂物隐患评估方法、装置及设备与流程
本申请涉及变电站监测,尤其涉及一种变电站外飘挂物隐患评估方法、装置及设备。
背景技术:
1、目前,塑料大棚、塑料薄膜等轻体飘挂物以及彩钢板、铁皮房顶等硬体飘挂物在变电站周围十分常见。这些飘挂物在雷雨大风天气时容易漂移到变电站内,引起电力设备短路跳闸,造成设备故障,导致停电。因此,及时对变电站周边飘挂物隐患进行识别从而落实风险预控对电力系统乃至社会稳定尤为重要。
2、现有的变电站外飘挂物隐患识别靠人工巡视,无人机拍照加人工查看图片识别来实现。该工作的智能化水平较低,变电站运维人员需要定期前往各个变电站对周边环境进行专门的巡视;使用无人机对站外拍照并人工查看站外图片进行飘挂物隐患识别,工作量大,效率低下。而且现有的风险告警方法中一旦等到风险高触发告警,工作人员已经来不及阻止事故发生了,缺乏合理的风险预估方案导致实际监测效果较差。
技术实现思路
1、本申请提供了一种变电站外飘挂物隐患评估方法、装置及设备,用于解决现有技术依赖人工辨识飘挂物,且风险评估机制不合理,导致实际效果较差的技术问题。
2、有鉴于此,本申请第一方面提供了一种变电站外飘挂物隐患评估方法,包括:
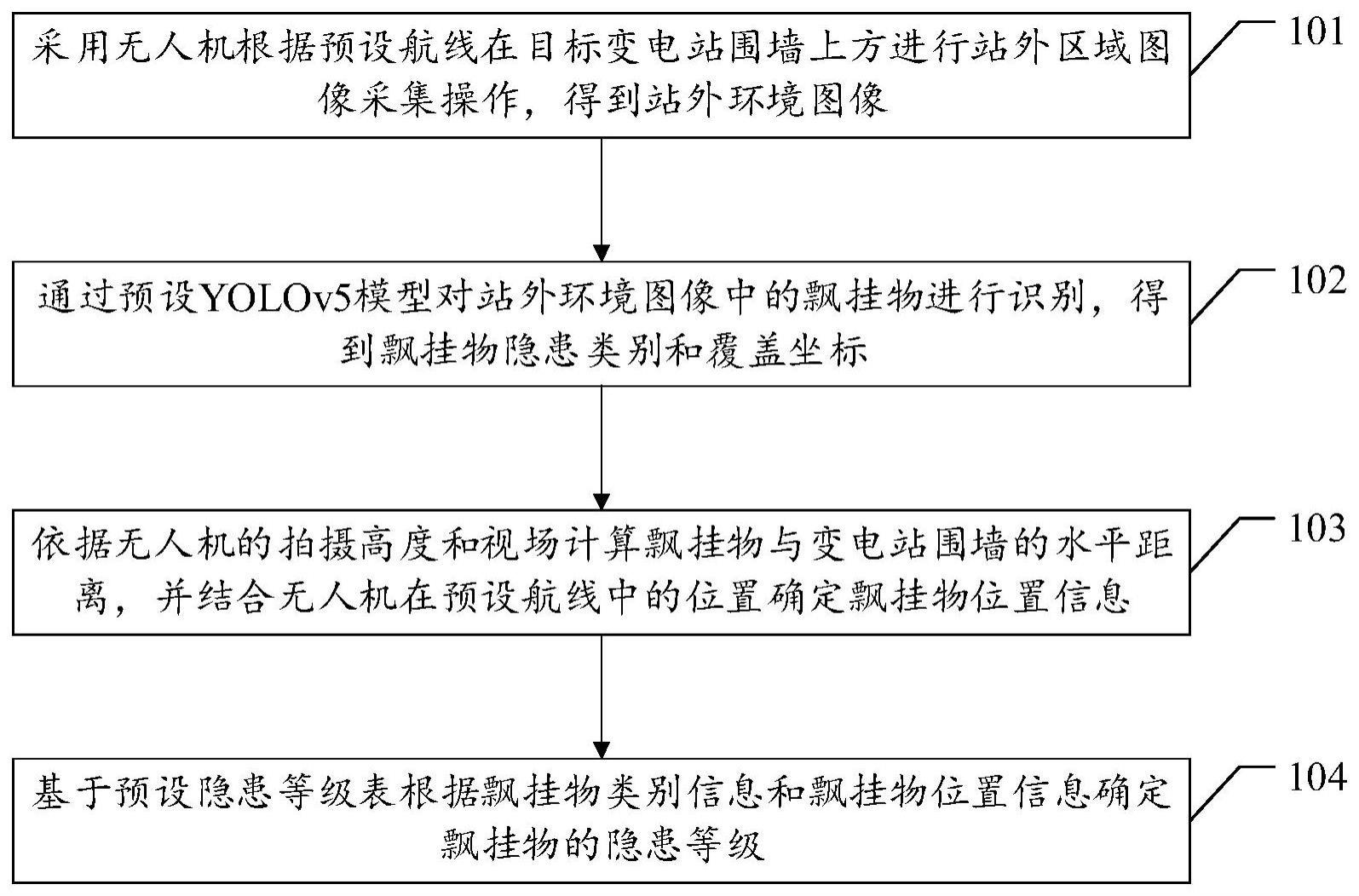
3、采用无人机根据预设航线在目标变电站围墙上方进行站外区域图像采集操作,得到站外环境图像;
4、通过预设yolov5模型对所述站外环境图像中的飘挂物进行识别,得到飘挂物隐患类别和覆盖坐标;
5、依据无人机的拍摄高度和视场计算所述飘挂物与变电站围墙的水平距离,并结合无人机在所述预设航线中的位置确定飘挂物位置信息;
6、基于预设隐患等级表根据所述飘挂物类别信息和所述飘挂物位置信息确定飘挂物的隐患等级。
7、优选地,所述采用无人机根据预设航线在目标变电站围墙上方进行站外区域图像采集操作,得到站外环境图像,之前还包括:
8、根据所述目标变电站的三维点云模型和拍摄距离间隔规划无人机的巡拍航线,得到预设航线。
9、优选地,所述通过预设yolov5模型对所述站外环境图像中的飘挂物进行识别,得到飘挂物隐患类别和覆盖坐标,之前还包括:
10、获取大量变电站外的历史环境图像;
11、对所述历史环境图像进行预处理操作,并构建初始图像训练集,所述预处理操作包括翻转、旋转、移位、增加高斯噪声和风格迁移;
12、通过预置标注工具对所述初始图像训练集进行自动标注操作,得到环境图像训练集;
13、采用所述环境图像训练集对初始yolov5模型进行飘挂物识别训练,得到预设yolov5模型。
14、优选地,所述依据无人机的拍摄高度和视场计算所述飘挂物与变电站围墙的水平距离,并结合无人机在所述预设航线中的位置确定飘挂物位置信息,包括:
15、根据无人机摄像头的35mm等效焦距计算无人机拍摄时的垂直视场角;
16、依据所述垂直视场角和拍摄高度计算出视场的大小后,基于几何原理根据所述拍摄高度和所述视场计算所述飘挂物与变电站围墙的水平距离;
17、根据无人机在所述预设航线中的位置和所述水平距离确定所述飘挂物的方位,得到飘挂物位置信息。
18、优选地,所述基于预设隐患等级表根据所述飘挂物类别信息和所述飘挂物位置信息确定飘挂物的隐患等级,之后还包括:
19、根据所述隐患等级触发变电站中的等级预警,所述等级预警与所述隐患等级对应。
20、本申请第二方面提供了一种变电站外飘挂物隐患评估装置,包括:
21、图像采集单元,用于采用无人机根据预设航线在目标变电站围墙上方进行站外区域图像采集操作,得到站外环境图像;
22、类别识别单元,用于通过预设yolov5模型对所述站外环境图像中的飘挂物进行识别,得到飘挂物隐患类别和覆盖坐标;
23、位置确定单元,用于依据无人机的拍摄高度和视场计算所述飘挂物与变电站围墙的水平距离,并结合无人机在所述预设航线中的位置确定飘挂物位置信息;
24、隐患评估单元,用于基于预设隐患等级表根据所述飘挂物类别信息和所述飘挂物位置信息确定飘挂物的隐患等级。
25、优选地,还包括:
26、航线规划单元,用于根据所述目标变电站的三维点云模型和拍摄距离间隔规划无人机的巡拍航线,得到预设航线。
27、优选地,还包括:模型预训练单元,具体用于:
28、获取大量变电站外的历史环境图像;
29、对所述历史环境图像进行预处理操作,并构建初始图像训练集,所述预处理操作包括翻转、旋转、移位、增加高斯噪声和风格迁移;
30、通过预置标注工具对所述初始图像训练集进行自动标注操作,得到环境图像训练集;
31、采用所述环境图像训练集对初始yolov5模型进行飘挂物识别训练,得到预设yolov5模型。
32、优选地,所述位置确定单元,具体用于:
33、根据无人机摄像头的35mm等效焦距计算无人机拍摄时的垂直视场角;
34、依据所述垂直视场角和拍摄高度计算出视场的大小后,基于几何原理根据所述拍摄高度和所述视场计算所述飘挂物与变电站围墙的水平距离;
35、根据无人机在所述预设航线中的位置和所述水平距离确定所述飘挂物的方位,得到飘挂物位置信息。
36、本申请第三方面提供了一种变电站外飘挂物隐患评估设备,所述设备包括处理器以及存储器;
37、所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;
38、所述处理器用于根据所述程序代码中的指令执行第一方面所述的变电站外飘挂物隐患评估方法。
39、从以上技术方案可以看出,本申请实施例具有以下优点:
40、本申请中,提供了一种变电站外飘挂物隐患评估方法,包括:采用无人机根据预设航线在目标变电站围墙上方进行站外区域图像采集操作,得到站外环境图像;通过预设yolov5模型对站外环境图像中的飘挂物进行识别,得到飘挂物隐患类别和覆盖坐标;依据无人机的拍摄高度和视场计算飘挂物与变电站围墙的水平距离,并结合无人机在预设航线中的位置确定飘挂物位置信息;基于预设隐患等级表根据飘挂物类别信息和飘挂物位置信息确定飘挂物的隐患等级。
41、本申请提供的一种变电站外飘挂物隐患评估方法,通过预设yolov5模型对变电站外的飘挂物进行识别,可以明确飘挂物的隐患类型和其覆盖的范围;而且还可以计算出飘挂物距离变电站围墙的水平距离,确定飘挂物位置信息;根据这些信息能够准确的评估当前飘挂物的隐患等级,预先评估出隐患等级能够确保预警的可靠性,且操作过程不需要人为干预。因此,本申请能够解决现有技术依赖人工辨识飘挂物,且风险评估机制不合理,导致实际效果较差的技术问题。
技术特征:
1.一种变电站外飘挂物隐患评估方法,其特征在于,包括:
2.根据权利要求1所述的变电站外飘挂物隐患评估方法,其特征在于,所述采用无人机根据预设航线在目标变电站围墙上方进行站外区域图像采集操作,得到站外环境图像,之前还包括:
3.根据权利要求1所述的变电站外飘挂物隐患评估方法,其特征在于,所述通过预设yolov5模型对所述站外环境图像中的飘挂物进行识别,得到飘挂物隐患类别和覆盖坐标,之前还包括:
4.根据权利要求1所述的变电站外飘挂物隐患评估方法,其特征在于,所述依据无人机的拍摄高度和视场计算所述飘挂物与变电站围墙的水平距离,并结合无人机在所述预设航线中的位置确定飘挂物位置信息,包括:
5.根据权利要求1所述的变电站外飘挂物隐患评估方法,其特征在于,所述基于预设隐患等级表根据所述飘挂物类别信息和所述飘挂物位置信息确定飘挂物的隐患等级,之后还包括:
6.一种变电站外飘挂物隐患评估装置,其特征在于,包括:
7.根据权利要求6所述的变电站外飘挂物隐患评估装置,其特征在于,还包括:
8.根据权利要求6所述的变电站外飘挂物隐患评估装置,其特征在于,还包括:模型预训练单元,具体用于:
9.根据权利要求6所述的变电站外飘挂物隐患评估装置,其特征在于,所述位置确定单元,具体用于:
10.一种变电站外飘挂物隐患评估设备,其特征在于,所述设备包括处理器以及存储器;
技术总结
本申请公开了一种变电站外飘挂物隐患评估方法、装置及设备,方法包括:采用无人机根据预设航线在目标变电站围墙上方进行站外区域图像采集操作,得到站外环境图像;通过预设YOLOv5模型对站外环境图像中的飘挂物进行识别,得到飘挂物隐患类别和覆盖坐标;依据无人机的拍摄高度和视场计算飘挂物与变电站围墙的水平距离,结合拍摄该隐患图片时无人机在所述预设航线中的位置,得到飘挂物位置信息;基于预设隐患等级表根据飘挂物类别信息和飘挂物位置信息确定飘挂物的隐患等级。本申请能够解决现有技术依赖人工辨识飘挂物,且风险评估机制不合理,导致实际效果较差的技术问题。
技术研发人员:陈家贤,唐毅,陈新城,徐冰涵,欧阳尚生,何兆端
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!