一种航测影像地物要素的智能解译方法与流程
本发明涉及无人机航测领域,尤其涉及神经网络模型深度学习领域。
背景技术:
1、现阶段神经网络模型深度学习是人工智能中机器学习发展的新阶段,由于神经网络模型深度学习强大的预训练模型、强大的模型表达能力、强大的计算推理速度,可以有效解决对复杂对象特征的刻画和复杂厂家的关联分析等问题,是目前最佳的对象提取方式。
2、同时无人机航测丰富了测量要素种类,但是当前航测成功的要素提取依赖人工识别和回执,效率较低;并且航道测绘单位全面图等长河测量项目的陆域地形更新测绘工作量大,航道岸线要素人工提取的低效作业模式不能满足快速地形图更新的需求。
技术实现思路
1、本发明提供了一种航测影像地物要素的智能解译方法。
2、其中本发明解决了现阶段遮挡物对道路提取形成干扰阻断,造成道路信息不完整不连通;样本量不多、来源少导致对影像道路识别准确率降低,泛化能力降低;水中泥沙含量高造成的水陆边界模糊不清,对二值化和边缘提取影响大的问题。
3、根据本公开实施例的一方面,提供了一种航测影像地物要素的智能解译方法,包括:
4、获取航测影像数据,并对航测影像数据进行预处理,得到测试样本数据;
5、将测试样本数据输入到第一神经网络模型中,得到输出结果;
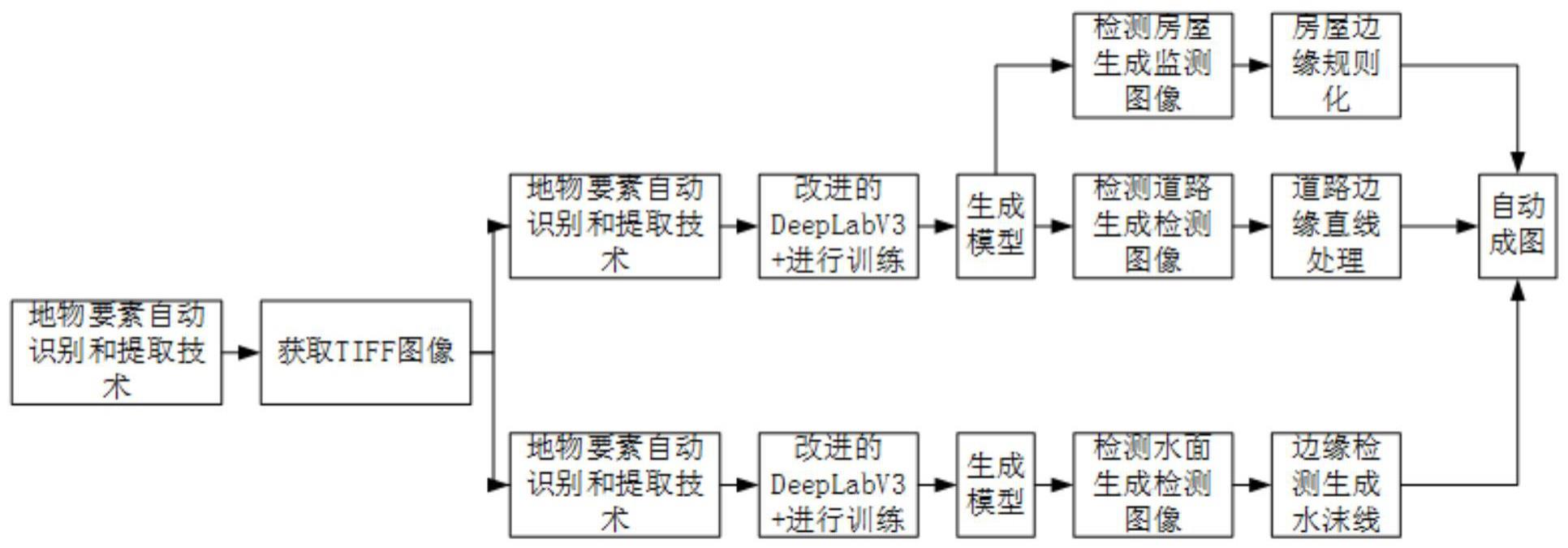
6、根据输出结果,采用算法对输出结果进行规则化处理,得到地物要素。
7、根据本公开实施例的另一方面,其中,所述采用算法对所述输出结果进行规则化处理,所述算法包括marching cubes算法和douglas-peucker算法。
8、根据本公开实施例的另一方面,其中,获取航测影像数据,并对航测影像数据进行预处理,得到测试样本数据,包括:将航测影像数据进行裁剪与增强调整,得到测试样本数据。
9、根据本公开实施例的另一方面,
10、marching cubes算法包括粗略调整和细微调整;
11、粗略调整是对输出结果的面积、长度、角度进行调整;
12、细微调整是对输出结果的长边和短边的调整。
13、根据本公开实施例的另一方面,提供了一种水沫线的提取方法,包括:
14、获取航测影像数据,并对航测影像数据进行预处理,得到测试样本数据;
15、将测试样本数据输入到第一神经网络模型中,得到输出结果;
16、根据flood fill算法对输出结果进行空洞填补,得到分割水域;
17、根据canny算子对分割水域进行检测提取,得到水沫线结果。
18、根据本公开实施例的另一方面,flood fill算法的参数包括起始节点、目标颜色、替换颜色,其中flood fill算法包括确定和起始节点相连的节点,通过一条目标颜色的路径相连,将目标颜色替换为替换颜色。
19、根据本公开实施例的另一方面,根据canny算子对分割水域进行检测提取,得到水沫线结果,包括:
20、根据canny算子提取分割水域的边缘,对分割水域的边缘做平滑处理,得到平滑结果;
21、根据平滑结果进行收缩膨胀处理,得到处理结果;将处理结果添加到分割水域中得到水沫线结果。
22、根据本公开实施例的另一方面,提供了一种神经网络模型的训练方法,包括:
23、获取航测影像数据,并对航测影像数据进行预处理,得到测试样本数据;
24、将测试样本数据进行划分,得到训练集样本数据、验证集样本数据和测试集样本数据;
25、将训练集样本数据输入到第二神经网络模型中的densenext网络进行特征提取,得到第一提取特征;
26、将第一提取特征分别输入两个aspp模型和瓶颈层,得到第二提取特征、第三提取特征和瓶颈层输入特征,并将第二提取特征和第三提取特征融合,得到融合特征;将融合特征和瓶颈层输入特征相加,得到输出结果;
27、根据输出结果和验证集对第二神经网络模型进行参数调整,获得超参数,根据超参数确定第一神经网络模型。
28、根据本公开实施例的另一方面,其中将测试样本数据进行划分,得到训练集样本数据、验证集样本数据和测试集样本数据,包括:
29、训练数据用于求解最小化损失函数的网络参数;
30、验证数据用于最小化过拟合;
31、测试数据用于在第二神经网络模型训练结束后测试第一神经网络模型的分类能力。
32、根据本公开实施例的另一方面,提供了一种航测影像地物要素的智能解译系统,地物要素图像的提取系统上采用上述任意一种方法进行地物要素解译。
33、本公开实施例采用以上技术方案,至少具备以下有益效果:
34、本公开实施例通过对航测影像进行裁剪增强了神经网络模型对不同尺寸的航测影像的学习能力,解决了因为航测影像较大无法直接作为神经网络模型训练数据的问题;通过对deeplabv3+神经网络模型进行模型更改,增强了细化分割结果的功能、同时能够在任意分辨率的样本上进行特征提取,获取更加丰富的语义信息,从而提取更多的道路信息,解决了遮挡物对道路提取形成干扰阻断及道路信息不完整不连通的问题;通过在模型训练之前,通过数据增广的方式增加样本的数量,同时增加样本的各种可能性,达到提高识别准确性和泛化能力的目的,解决了样本量不够、来源少,导致对各种影像道路识别准确性降低,泛化能力降低的问题。
35、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开实施例。
技术特征:
1.一种航测影像地物要素的智能解译方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,其中所述采用算法对所述输出结果进行规则化处理,所述算法包括marching cubes算法和douglas-peucker算法。
3.根据权利要求1所述的方法,其特征在于,其中,获取航测影像数据,并对所述航测影像数据进行预处理,得到测试样本数据,包括:将所述航测影像数据进行裁剪与增强调整,得到所述测试样本数据。
4.根据权利要求2中所述的方法,其特征在于,
5.一种水沫线的提取方法,其特征在于,包括:
6.根据权利要求5所述的方法,其特征在于,所述flood fill算法的参数包括起始节点、目标颜色、替换颜色,其中所述flood fill算法包括确定和所述起始节点相连的节点,通过一条目标颜色的路径相连,将所述目标颜色替换为所述替换颜色。
7.根据权利要求5所述的方法,其特征在于,根据canny算子对所述分割水域进行检测提取,得到水沫线结果,包括:
8.一种神经网络模型的训练方法,其特征在于,包括:
9.根据权利要求8所述的方法,其特征在于,其中将所述测试样本数据进行划分,得到训练集样本数据、验证集样本数据和测试集样本数据,包括:
10.一种航测影像地物要素的智能解译系统,其特征在于,所述航测影像地物要素提取系统上采用如权利要求1-9中任意一项所述的方法进行地物要素解译。
技术总结
本发明提供了一种航测影像地物要素的智能解译方法,涉及无人机航测领域,尤其涉及神经网络模型深度学习领域,可应用于实现线状、块状地形要素的自动化提取。其中具体方案包括:S1、获取航测影像数据,并对航测影像数据进行预处理,得到测试样本数据;S2、将测试样本数据输入到第一神经网络模型中,得到输出结果;S3、根据输出结果,采用算法对输出结果进行规则化处理,得到地物要素;解决了以下问题:原始影像尺寸较大无法直接作为训练数据;遮挡物对道路提取存在干扰阻断及道路信息不完整不连通;样本量少,各种影像道路识别准确性低,泛化能力低;水中泥沙含量高造成的水陆边界模糊不清,对于二值化和边缘提取存在影响。
技术研发人员:王勇,袁鹏,余大杰,王俊,唐国民,马随阳,谢齐,孟昌,余永周,望曹俊杰,吕英豪,李金乾,廖阳
受保护的技术使用者:武汉天地鹰测绘科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!