无人叉车放货检测方法及装置、无人叉车、存储介质与流程
本申请涉及无人叉车,尤其涉及一种无人叉车放货检测方法及装置、无人叉车、存储介质。
背景技术:
1、当前,在仓储物流的工作场景中,通过无人叉车等机器人进行货物运输的需求日益增长。传统的无人叉车运输基本依赖2d激光雷达、tof(time of flight,飞行时间)相机等作为检测设备,根据检测所得到的平面数据确定取货、放货位置。然而,在实践中发现,针对需要将货物放置在货架,尤其是高位货架(例如高度为11米以上的货架等)的情形,传统的无人叉车由于仅能获取平面数据,不仅无法判断放货高度,而且往往也难以准确地对货架横梁、障碍物等进行检测和识别,进而难以确定合适的放货位置,容易导致在放货过程中发生货物碰撞乃至于跌落的危险,降低了无人叉车运输货物的安全性及可靠性。
技术实现思路
1、本申请实施例公开了一种无人叉车放货检测方法及装置、无人叉车、存储介质,能够提升无人叉车对货架横梁、障碍物等进行检测的准确性,进而能够准确确定包括放货高度在内的放货位置,从而有利于提升无人叉车进行货物运输及放置的安全性和可靠性。
2、本申请实施例第一方面公开一种无人叉车放货检测方法,应用于无人叉车,所述方法包括:
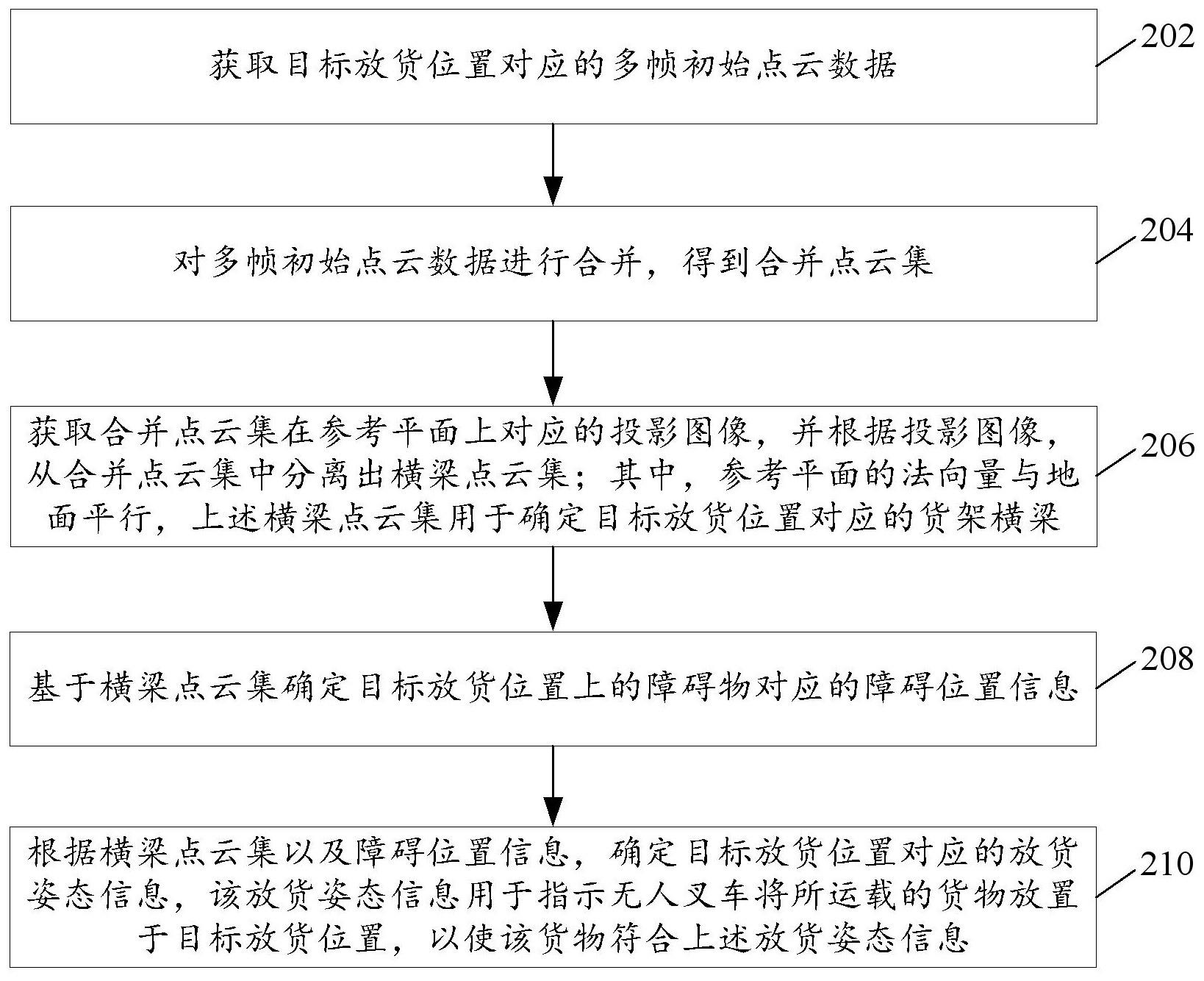
3、获取目标放货位置对应的多帧初始点云数据;
4、对所述多帧初始点云数据进行合并,得到合并点云集;
5、获取所述合并点云集在参考平面上对应的投影图像,并根据所述投影图像,从所述合并点云集中分离出横梁点云集;其中,所述参考平面的法向量与地面平行,所述横梁点云集用于确定所述目标放货位置对应的货架横梁;
6、基于所述横梁点云集,确定所述目标放货位置上的障碍物对应的障碍位置信息;
7、根据所述横梁点云集以及所述障碍位置信息,确定所述目标放货位置对应的放货姿态信息,所述放货姿态信息用于指示所述无人叉车将所运载的货物放置于所述目标放货位置,以使所述货物符合所述放货姿态信息。
8、本申请实施例第二方面公开一种无人叉车放货检测装置,应用于无人叉车,所述无人叉车放货检测装置包括:
9、点云数据获取单元,用于获取目标放货位置对应的多帧初始点云数据;
10、多帧合并单元,用于对所述多帧初始点云数据进行合并,得到合并点云集;
11、投影图像获取单元,用于获取所述合并点云集在参考平面上对应的投影图像,并根据所述投影图像,从所述合并点云集中分离出横梁点云集;其中,所述参考平面的法向量与地面平行,所述横梁点云集用于确定所述目标放货位置对应的货架横梁;
12、障碍信息确定单元,用于基于所述横梁点云集,确定所述目标放货位置上的障碍物对应的障碍位置信息;
13、姿态信息确定单元,用于根据所述横梁点云集以及所述障碍位置信息,确定所述目标放货位置对应的放货姿态信息,所述放货姿态信息用于指示所述无人叉车将所运载的货物放置于所述目标放货位置,以使所述货物符合所述放货姿态信息。
14、本申请实施例第三方面公开了一种无人叉车,包括:
15、存储有可执行程序代码的存储器;
16、与所述存储器耦合的处理器;
17、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本申请实施例第一方面公开的任意一种无人叉车放货检测方法中的全部或部分步骤。
18、本申请实施例第四方面公开了一种计算机可读存储介质,其存储计算机程序,其中,所述计算机程序使得计算机执行本申请实施例第一方面公开的任意一种无人叉车放货检测方法中的全部或部分步骤。
19、与相关技术相比,本申请实施例具有以下有益效果:
20、本申请实施例中,应用无人叉车放货检测方法的无人叉车可以获取目标放货位置对应的多帧初始点云数据,并对该多帧初始点云数据进行合并,得到合并点云集。无人叉车可以获取该合并点云集在参考平面上对应的投影图像,并根据该投影图像,从合并点云集中分离出横梁点云集。其中,上述参考平面的法向量可以与地面平行,上述横梁点云集则可以用于确定目标放货位置对应的货架横梁。在此基础上,无人叉车可以基于横梁点云集,确定目标放货位置上的障碍物对应的障碍位置信息,进而可以根据上述横梁点云集以及障碍位置信息,确定目标放货位置对应的放货姿态信息,该放货姿态信息可以用于指示无人叉车将所运载的货物放置于目标放货位置,以使该货物符合上述放货姿态信息。可见,实施本申请实施例,能够在仓储物流的工作场景中,通过将针对目标放货位置所采集的多帧点云数据进行合并,以提升无人叉车对目标放货位置附近的货架横梁、障碍物等进行检测的精度。同时,基于点云数据与投影图像的相互转换,还能够快速计算出上述货架横梁、障碍物等对应的位置及姿态信息,进而能够合理确定无人叉车所运载货物可放置的位置。在相关技术中,无人叉车往往难以对货架,尤其是高位货架进行准确的检测和识别,而相较于传统的放货检测方案,本申请实施例的无人叉车放货检测方法能够有效提升无人叉车对货架进行放货检测的精确性,从而能够准确确定包括放货高度在内的放货位置,避免在放货过程中发生货物碰撞乃至于跌落的危险,有利于提升无人叉车进行货物运输及放置的安全性和可靠性。
技术特征:
1.一种无人叉车放货检测方法,其特征在于,应用于无人叉车,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取所述合并点云集在参考平面上对应的投影图像,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述投影图像,从所述合并点云集中分离出横梁点云集,包括:
4.根据权利要求1至3任一项所述的方法,其特征在于,所述基于所述横梁点云集,确定所述目标放货位置上的障碍物对应的障碍位置信息,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述横梁点云集、所述拟合直线方程以及货物规格信息,从所述转移点云集中提取障碍物点云集,包括:
6.根据权利要求4所述的方法,其特征在于,在所述对所述边缘点云数据进行直线拟合,得到拟合直线方程之后,所述方法还包括:
7.根据权利要求1至3任一项所述的方法,其特征在于,所述放货姿态信息至少包括目标坐标位置以及目标偏航角数据,所述目标坐标位置包括横轴坐标位置、纵轴坐标位置以及竖轴坐标位置,所述根据所述横梁点云集以及所述障碍位置信息,确定所述目标放货位置对应的放货姿态信息,包括:
8.一种无人叉车放货检测装置,其特征在于,应用于无人叉车,所述无人叉车放货检测装置包括:
9.一种无人叉车,其特征在于,包括存储器及处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器实现如权利要求1至7任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的方法。
技术总结
一种无人叉车放货检测方法及装置、无人叉车、存储介质,该方法包括:获取目标放货位置对应的多帧初始点云数据;对多帧初始点云数据进行合并,得到合并点云集;获取合并点云集在参考平面上对应的投影图像,根据该投影图像从合并点云集中分离出横梁点云集;基于横梁点云集,确定目标放货位置上的障碍物对应的障碍位置信息;根据横梁点云集以及障碍位置信息,确定目标放货位置对应的放货姿态信息,该放货姿态信息用于指示无人叉车将所运载的货物放置于目标放货位置,以使该货物符合上述放货姿态信息。实施本申请实施例,能够提升无人叉车对货架进行检测的准确性,进而能够准确确定放货位置,有利于提升无人叉车进行货物运输及放置的安全性和可靠性。
技术研发人员:杨秉川,方牧,鲁豫杰,李陆洋,王琛,方晓曼
受保护的技术使用者:未来机器人(深圳)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!