一种目标中心定位补偿方法与流程
本发明属于智能交通,具体涉及一种目标中心定位补偿方法。
背景技术:
1、相机是进行目标感知的重要传感器之一,已被广泛应用在智能交通、工业等各个领域。在智能交通领域中,通常使用单相机进行车辆的检测与识别,使用多相机融合进行全息感知。在进行车辆检测时,首先用一个二维矩形框框出车辆所在的像素位置,再通过标定将各像素坐标转换到同一坐标系下进行融合。由于车辆相对于各个相机的姿态不同,导致不同相机检测到的车辆位置不同,如有的相机检测的是车头,有的相机检测的是车尾,从而使得进行融合时出现位置异常,导致车辆检测位置不能补偿到车辆正中心,不便于与多传感器融合,因此我们需要提出一种目标中心定位补偿方法来解决上述存在的问题。
技术实现思路
1、本发明的目的在于提供一种目标中心定位补偿方法,能够将车辆检测位置补偿到车辆正中心,使得各相机检测到的位置一致,便于进行多传感器融合,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明采用了如下技术方案:
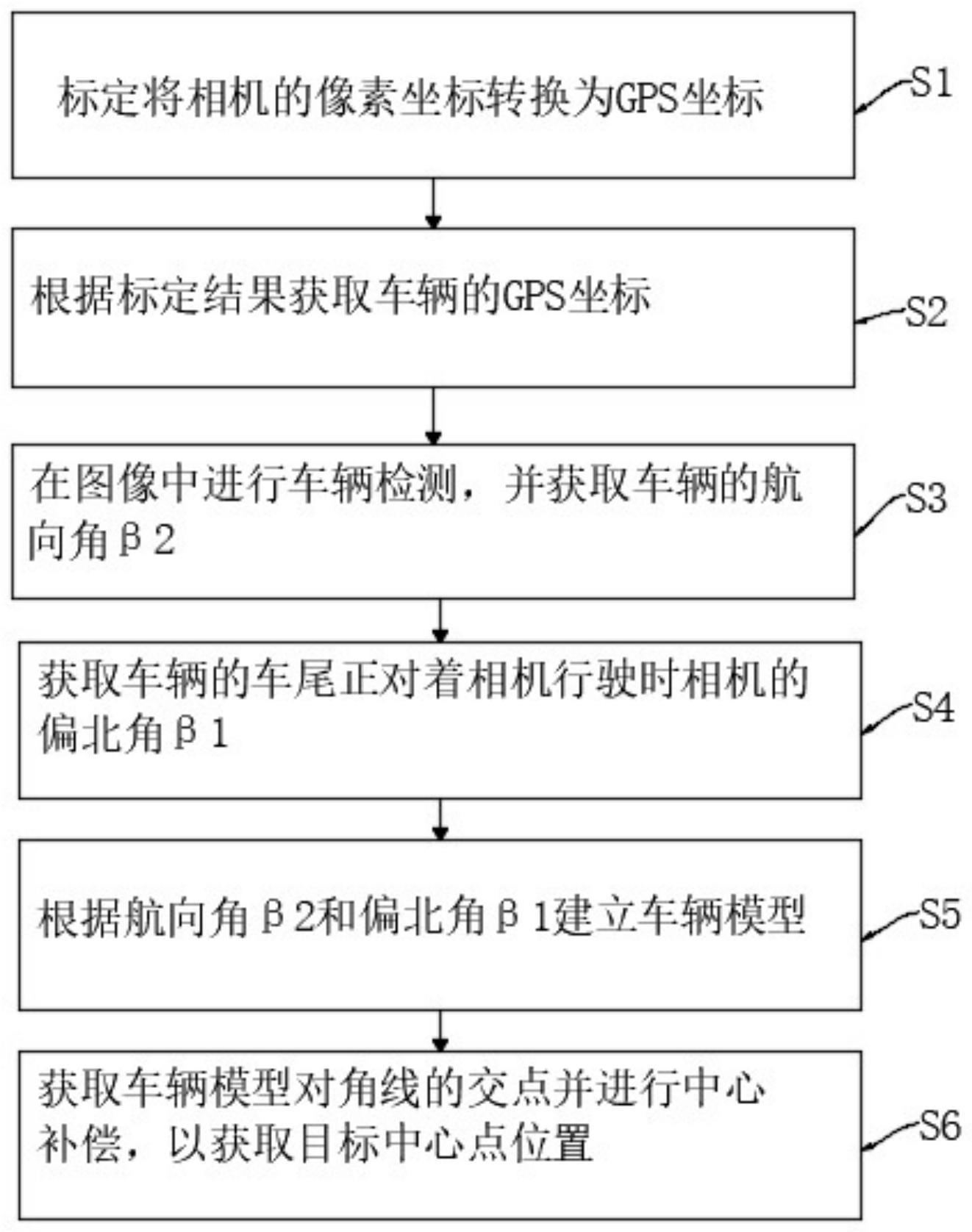
3、一种目标中心定位补偿方法,包括如下步骤:
4、s1、标定将相机的像素坐标转换为gps坐标;
5、s2、根据标定结果获取车辆的gps坐标;
6、s3、在图像中进行车辆检测,并获取车辆的航向角β2;
7、s4、获取车辆的车尾正对着相机行驶时相机的偏北角β1;
8、s5、根据航向角β2和偏北角β1建立车辆模型;
9、s6、获取车辆模型对角线的交点并进行中心补偿,以获取目标中心点位置。
10、优选的,步骤s1中,所述相机在成像时包括世界坐标系、相机坐标系、图像坐标系和像素坐标系,且相机在成像时依次从世界坐标系转换为相机坐标系,相机坐标系转换为图像坐标系,图像坐标系转换为像素坐标系,其中世界坐标系转换为相机坐标系被称为刚体变换,相机坐标系转换为图像坐标系被称为透视投影,图像坐标系转换为像素坐标系被称为仿射变换,所述相机的成像公式如下:
11、
12、其中,(u,v,w)为在世界坐标系下—点的物理坐标,(u,v)为该点对应的在像素坐标系下的像素坐标,z为尺度因子,f为像距,dx,dy分别表示x、y方向上的一个像素在相机感光板上的物理长度,u0,v0分别表示相机感光板中心在像素坐标系下的坐标,θ表示感光板的横边和纵边之间的角度,称为相机的外参矩阵,外参矩阵取决于相机坐标系和世界坐标系的相对位置,r表示旋转矩阵,t表示平稳矢量。
13、优选的,步骤s2中,在获取车辆gps坐标时,选用t时刻,在图像中进行车辆检测,使用一个二维矩形框框出车辆所在的位置,获取该二维矩形框下边沿的中心坐标,并通过标定将像素坐标转换为第一帧gps坐标。
14、优选的,步骤s3中,在获取车辆的航向角β2时,选用t+1时刻,在图像中进行车辆检测,获取二维矩形框下边沿的中心点坐标,并通过标定,将像素坐标转换为第二帧gps坐标,根据第一帧gps坐标和第二帧gps坐标计算车辆航向角。
15、优选的,所述航向角在计算时,通过经纬度求解方位角,根据第一帧gps坐标和第二帧gps坐标点经纬度计算方位角,第一帧gps坐标的经纬度为(lon0,lat0),第二帧gps坐标点经纬度为(lon1,lat1),方位角使用bearing表示,方位角的计算公式为:
16、distance_north=r*(lat1-lat0)
17、distance_east=r*cos(lat0)*(lon1-lon0)
18、bearing=mod(atan2(distance_east,distance_north),2*pi)。
19、优选的,步骤s4中,在获取相机的偏北角β1时,当车辆的车尾正对着相机行驶时即朝远离相机的方向行驶时,计算车辆的航向角,此时的航向角即为相机的偏北角。
20、优选的,步骤s5中,所述车辆模型在建立时,使用a、b、c、d四个点围成的矩阵,该矩阵的长度和宽度分别为车辆的长度和宽度,其中车辆的长度和宽度在获取时通过图像检测车辆的车型,根据车型预估车辆的长度和宽度。
21、优选的,所述车辆的长度和宽度在获取时通过如下方案替换通过图像检测车辆的车型,根据车型预估车辆的长度和宽度:使用激光雷达检测得到车辆的长度和宽度,并将激光雷达检测的目标与图像检测的目标进行关联,从而将激光雷达检测到的目标尺寸赋给图像目标。
22、优选的,步骤s6中,车辆模型对角线的交点在获取时,为便于对车辆模型数据分析,将车辆模型的坐标系旋转,将坐标系校正,航向角β2和偏北角β1之间的夹角为α。
23、优选的,所述车辆模型在进行中心补偿时,将像素坐标获取的目标位置设置为t,通过标定后转换的坐标k进行中心补偿,即获取目标的中心点位置点0的坐标,需要补偿的距离为k0之间的距离l,距离l的计算公式为:
24、l=(lemgth*|cos(α)|+width*|sin(α)|)/2。
25、本发明提出的一种目标中心定位补偿方法,与现有技术相比,具有以下优点:
26、本发明通过标定将相机的像素坐标转换为gps坐标,再分别获取车辆的gps坐标、车辆的航向角β2和相机的偏北角β1,根据航向角β2和偏北角β1建立车辆模型,获取车辆模型对角线的交点并进行中心补偿,以获取目标中心点位置,从而能够将车辆检测位置补偿到车辆正中心,使得各相机检测到的位置一致,便于进行多传感器融合。
技术特征:
1.一种目标中心定位补偿方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种目标中心定位补偿方法,其特征在于:步骤s1中,所述相机在成像时包括世界坐标系、相机坐标系、图像坐标系和像素坐标系,且相机在成像时依次从世界坐标系转换为相机坐标系,相机坐标系转换为图像坐标系,图像坐标系转换为像素坐标系,其中世界坐标系转换为相机坐标系被称为刚体变换,相机坐标系转换为图像坐标系被称为透视投影,图像坐标系转换为像素坐标系被称为仿射变换,所述相机的成像公式如下:
3.根据权利要求1所述的一种目标中心定位补偿方法,其特征在于:步骤s2中,在获取车辆gps坐标时,选用t时刻,在图像中进行车辆检测,使用一个二维矩形框框出车辆所在的位置,获取该二维矩形框下边沿的中心坐标,并通过标定将像素坐标转换为第一帧gps坐标。
4.根据权利要求3所述的一种目标中心定位补偿方法,其特征在于:步骤s3中,在获取车辆的航向角β2时,选用t+1时刻,在图像中进行车辆检测,获取二维矩形框下边沿的中心点坐标,并通过标定,将像素坐标转换为第二帧gps坐标,根据第一帧gps坐标和第二帧gps坐标计算车辆航向角。
5.根据权利要求4所述的一种目标中心定位补偿方法,其特征在于:所述航向角在计算时,通过经纬度求解方位角,根据第一帧gps坐标和第二帧gps坐标点经纬度计算方位角,第一帧gps坐标的经纬度为(lon0,lato),第二帧gps坐标点经纬度为(lon1,lat1),方位角使用bearing表示,方位角的计算公式为:
6.根据权利要求5所述的一种目标中心定位补偿方法,其特征在于:步骤s4中,在获取相机的偏北角β1时,当车辆的车尾正对着相机行驶时即朝远离相机的方向行驶时,计算车辆的航向角,此时的航向角即为相机的偏北角。
7.根据权利要求1所述的一种目标中心定位补偿方法,其特征在于:步骤s5中,所述车辆模型在建立时,使用a、b、c、d四个点围成的矩阵,该矩阵的长度和宽度分别为车辆的长度和宽度,其中车辆的长度和宽度在获取时通过图像检测车辆的车型,根据车型预估车辆的长度和宽度。
8.根据权利要求7所述的一种目标中心定位补偿方法,其特征在于:所述车辆的长度和宽度在获取时通过如下方案替换通过图像检测车辆的车型,根据车型预估车辆的长度和宽度:使用激光雷达检测得到车辆的长度和宽度,并将激光雷达检测的目标与图像检测的目标进行关联,从而将激光雷达检测到的目标尺寸赋给图像目标。
9.根据权利要求1所述的一种目标中心定位补偿方法,其特征在于:步骤s6中,车辆模型对角线的交点在获取时,为便于对车辆模型数据分析,将车辆模型的坐标系旋转,将坐标系校正,航向角β2和偏北角β1之间的夹角为α。
10.根据权利要求9所述的一种目标中心定位补偿方法,其特征在于:所述车辆模型在进行中心补偿时,将像素坐标获取的目标位置设置为t,通过标定后转换的坐标k进行中心补偿,即获取目标的中心点位置点0的坐标,需要补偿的距离为k0之间的距离l,距离l的计算公式为:
技术总结
本发明涉及智能交通技术领域,具体公开了一种目标中心定位补偿方法,通过标定将相机的像素坐标转换为GPS坐标,再分别获取车辆的GPS坐标、车辆的航向角β2和相机的偏北角β1,在获取车辆GPS坐标时,选用t时刻,在图像中进行车辆检测,使用一个二维矩形框框出车辆所在的位置,获取该二维矩形框下边沿的中心坐标,并通过标定将像素坐标转换为第一帧GPS坐标,根据航向角β2和偏北角β1建立车辆模型,获取车辆模型对角线的交点并进行中心补偿,以获取目标中心点位置,通过以上操作能够将车辆检测位置补偿到车辆正中心,使得各相机检测到的位置一致,便于进行多传感器融合。
技术研发人员:刘云鹏,邱海,刘甜甜,李禹杰,单婷婷,贾悦
受保护的技术使用者:浙江海康智联科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!