二维柱塞电机泵刚柔耦合动力学仿真方法及结构优化方法
本发明属于液压,具体涉及一种二维柱塞电机泵刚柔耦合动力学仿真方法及结构优化方法。
背景技术:
1、二维柱塞电机泵包括电机泵壳体、定子、转子、泵芯和传动机构。当电机泵定子通上交流电后,定子产生的旋转磁场与转子上的永磁体相互作用,产生的电磁力推动转子相对于电机泵定子开始旋转,转子通过联轴器带动柱塞轴以相同的角速度旋转。由于圆柱凸轮是静止不动的,圆柱凸轮上的特殊滚道与柱塞轴上的滚轮发生相对运动,使得柱塞轴在旋转的同时做往复轴向运动。
2、由于二维柱塞电机泵里面一些构件存在弹性变形,是一个刚柔混合系统,导致现有的分析过程结构优化方式繁琐复杂,效率不高,成本高,结果也不够乐观。
3、因此,申请人提出一种基于多体动力学仿真软件adams与有限元软件ansys的仿真方法建立泵的刚柔混合动力学模型,从而对柱塞泵进行动力学特性分析。
技术实现思路
1、为了弥补现有技术的不足,本发明提供一种二维柱塞电机泵刚柔耦合动力学仿真方法及结构优化方法技术方案。
2、一种二维柱塞电机泵刚柔耦合动力学仿真方法,包括:
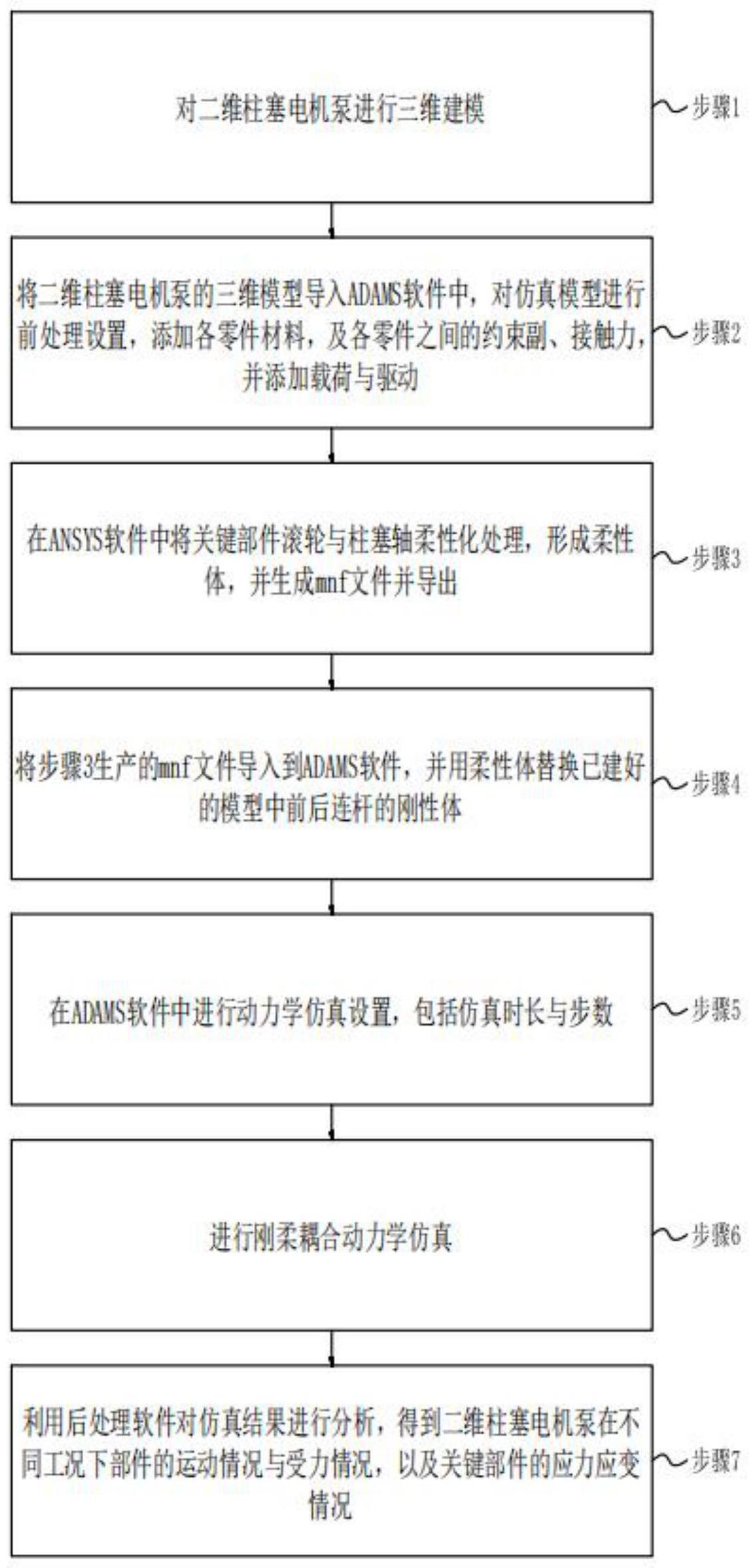
3、步骤1,对二维柱塞电机泵进行三维建模;
4、步骤2,将二维柱塞电机泵的三维模型导入adams软件中,对仿真模型进行前处理设置,添加各零件材料,及各零件之间的约束副、接触力,并添加载荷与驱动;载荷包括高压腔对柱塞轴的液压力以及转动过程中作用在柱塞轴上的不平衡电磁力,液压力通过step函数添加,电磁力通过akispl函数施加;
5、步骤3,在ansys软件中将关键部件滚轮与柱塞轴柔性化处理,形成柔性体,并生成模态中性(mnf)文件导出;
6、步骤4,将步骤3生成的模态中性(mnf)文件导入到adams软件,并用柔性体替换已建好的模型中前后连杆的刚性体;
7、步骤5,在adams软件中进行动力学仿真设置,包括仿真时长与步数;
8、步骤6,进行刚柔耦合动力学仿真;
9、步骤7,利用后处理软件对仿真结果进行分析,得到二维柱塞电机泵在不同工况下部件的运动情况与受力情况,以及关键部件的应力应变情况。
10、进一步地,所述步骤2中添加约束副的操作包括:添加各个部件的质心,添加泵体外壳、电机外壳、泵体、圆柱凸轮与大地之间的固定副,添加电机外壳与定子的固定副,添加电机外壳与前端盖、后端盖之间的固定副,添加柱塞轴与电机外壳之间的圆柱副,添加柱塞轴与联轴器之间的固定副,添加柱塞轴与轴承之间的旋转副,添加柱塞轴与滚轮架之间的固定副,添加联轴器与转子之间的固定副,添加滚轮与滚轮架的旋转副。
11、进一步地,所述步骤2中的接触力包括:滚轮与圆柱凸轮之间的刚体-刚体接触力,滚轮架与柱塞轴之间的刚体-刚体接触力,滚轮架与滚轮之间的刚体-刚体接触力。
12、进一步地,所述步骤2中的驱动包括:施加在柱塞轴与电机外壳之间的圆柱副上的旋转驱动。
13、进一步地,所述步骤2中电磁力的添加方式为:利用adams力函数公式中的akispl函数拟合电磁力变化曲线,实现电机泵转子所受倾覆力随柱塞轴转角变化而变化,模拟实际工况中电磁力变化情况。
14、进一步地,所述步骤2还包括:对于导入adams中的三维模型,根据拉格朗日运动方程,对每一部件建立6个广义坐标带乘子的拉格朗日方程及相应的约束方程:
15、
16、ψi=0 (i=1,2,…,m)
17、式中:
18、k——系统动能表达式;
19、qj——描述系统的广义坐标;
20、ψi——系统的约束方程;
21、fj——在广义坐标方向的广义力;
22、λj——m×1的拉格朗日乘子矩阵。
23、进一步地,所述步骤3包括:
24、步骤3.1,将三维模型导入ansys apdl工作界面;
25、步骤3.2,设置材料属性,创建连接点;
26、步骤3.3,使用mesh模块进行网格划分;
27、步骤3.4,建立刚性区域,包括建立主节点和从节点;
28、步骤3.5,输出模态中性(mnf)文件,输出文件时设置分析类型和抽取模态数。
29、进一步地,所述步骤4包括:
30、步骤4.1,使用adams软件中柔性体替换刚性体功能将模态中性(mnf)文件导入模型中;
31、步骤4.2,将柔性体质心与要替换部件质心对齐;
32、步骤4.3,模态中性(mnf)文件包含了柔性体的几何信息、质量、质心和转动惯量、模态、模态质量和模态刚度等信息,adams软件基于柔性体运动方程来计算每一时刻物体的弹性位移,进而描述其变形运动。
33、进一步地,所述步骤4.3中的柔性体运动方程为:
34、
35、式中:
36、ξ,——柔性体的广义坐标及其时间导数;
37、m,——柔性体的质量矩阵及其对时间的导数;
38、——质量矩阵对柔性体广义坐标的偏导数,m为模态数。
39、ψ——约束方程;
40、λ——对应于约束方程的拉氏乘子;
41、l——对应于模态坐标的结构部件的广义刚度矩阵;
42、fg——重力;
43、d——包含阻尼系数的常值对称阵;
44、q——投影到ξ上的广义力。
45、本发明还提供一种二维柱塞电机泵结构优化方法,包括:
46、采用如上所述的仿真方法对二维柱塞电机泵进行多次仿真分析,每次仿真分析对二维柱塞电机泵模型设置不同的参数,根据仿真分析结果得到最佳的参数方案,从而对二维柱塞电机泵进行结构优化。
47、与现有技术相比,本发明的有益效果在于:
48、1)利用虚拟样机设计方法可以摆脱对物理样机的过分依赖,研发成本降低、周期变短、产品质量提高;
49、2)克服了传统研发的很多的弊端,支持对产品的全方位测试,分析与评估,强调不同领域的虚拟化的协同设计,是对研发模式的创新;
50、3)通过参数调节可以模拟不同工况下二维柱塞电机泵的受力与转速情况,方便快捷;
51、4)本发明可以跟具仿真分析结果对二维柱塞电机泵的结构进行优化改进,成本更低,效率更高。
技术特征:
1.一种二维柱塞电机泵刚柔耦合动力学仿真方法,其特征在于,包括:
2.根据权利要求1所述的一种二维柱塞电机泵刚柔耦合动力学仿真方法,其特征在于,所述步骤2中添加约束副的操作包括:添加各个部件的质心,添加泵体外壳、电机外壳、泵体、圆柱凸轮与大地之间的固定副,添加电机外壳与定子的固定副,添加电机外壳与前端盖、后端盖之间的固定副,添加柱塞轴与电机外壳之间的圆柱副,添加柱塞轴与联轴器之间的固定副,添加柱塞轴与轴承之间的旋转副,添加柱塞轴与滚轮架之间的固定副,添加联轴器与转子之间的固定副,添加滚轮与滚轮架的旋转副。
3.根据权利要求1所述的一种二维柱塞电机泵刚柔耦合动力学仿真方法,其特征在于,所述步骤2中的接触力包括:滚轮与圆柱凸轮之间的刚体-刚体接触力,滚轮架与柱塞轴之间的刚体-刚体接触力,滚轮架与滚轮之间的刚体-刚体接触力。
4.根据权利要求1所述的一种二维柱塞电机泵刚柔耦合动力学仿真方法,其特征在于,所述步骤2中的驱动包括:施加在柱塞轴与电机外壳之间的圆柱副上的旋转驱动。
5.根据权利要求1所述的一种二维柱塞电机泵刚柔耦合动力学仿真方法,其特征在于,所述步骤2中电磁力的添加方式为:利用adams力函数公式中的akispl函数拟合电磁力变化曲线,实现电机泵转子所受倾覆力随柱塞轴转角变化而变化,模拟实际工况中电磁力变化情况。
6.根据权利要求1所述的一种二维柱塞电机泵刚柔耦合动力学仿真方法,其特征在于,所述步骤2还包括:对于导入adams中的三维模型,根据拉格朗日运动方程,对每一部件建立6个广义坐标带乘子的拉格朗日方程及相应的约束方程:
7.根据权利要求1所述的一种二维柱塞电机泵刚柔耦合动力学仿真方法,其特征在于,所述步骤3包括:
8.根据权利要求1所述的一种二维柱塞电机泵刚柔耦合动力学仿真方法,其特征在于,所述步骤4包括:
9.根据权利要求8所述的一种二维柱塞电机泵刚柔耦合动力学仿真方法,其特征在于,所述步骤4.3中的柔性体运动方程为:
10.一种二维柱塞电机泵结构优化方法,其特征在于,包括:
技术总结
本发明属于液压技术领域,具体涉及一种二维柱塞电机泵刚柔耦合动力学仿真方法及结构优化方法,包括:三维建模;将三维模型导入ADAMS软件中,对仿真模型进行前处理设置;在ANSYS软件中将关键部件滚轮与柱塞轴柔性化处理,形成柔性体,并生成mnf文件并导出;将mnf文件导入到ADAMS软件,并用柔性体替换已建好的模型中前后连杆的刚性体;在ADAMS软件中进行动力学仿真设置;进行刚柔耦合动力学仿真;利用后处理软件对仿真结果进行分析,得到二维柱塞电机泵在不同工况下部件的运动情况与受力情况,以及关键部件的应力应变情况。本发明通过参数调节可以模拟不同工况下二维柱塞电机泵的受力与转速情况,方便快捷。
技术研发人员:裘信国,李帅,王富城,陈奎阁,郑颖
受保护的技术使用者:浙江工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!