一种坐位体前屈的测量方法和系统与流程
本申请涉及计算机视觉领域,特别是涉及一种坐位体前屈的测量方法和系统。
背景技术:
1、坐位体前屈属于最常见的一种中考体育考试项目。常见的坐位体前屈设备,主要分为两种类型,一种是传统设备,该类型的设备不使用电,只有一个刻度尺和一个游标,最终的成绩需要人工查看,容易出现人为错误而造成的误差;另一种类型的设备是带电子传感器的半智能设备,该设备的测距原理是体测人员运动时推动游标,游标的移动会遮挡设备内嵌入的红外光栅,传感器可以根据光栅被遮挡的范围提示本次体测推动的距离,该类型设备虽然具备了信息采集电子化的能力,但也存在诸多问题,例如,该设备的数据仍然需要人工记录,而无法自动识别和获取,这不利于体测成绩的保存和取证。此外,该设备的测量准确度不够高。
2、目前针对相关技术中如何提高坐位体前屈成绩测量的准确率问题,尚未提出有效的解决方案。
技术实现思路
1、本申请实施例提供了一种坐位体前屈的测量方法和系统,以至少解决相关技术中如何实现坐位体前屈的测量自动化问题。
2、第一方面,本申请实施例提供了一种坐位体前屈的测量方法,所述方法包括:
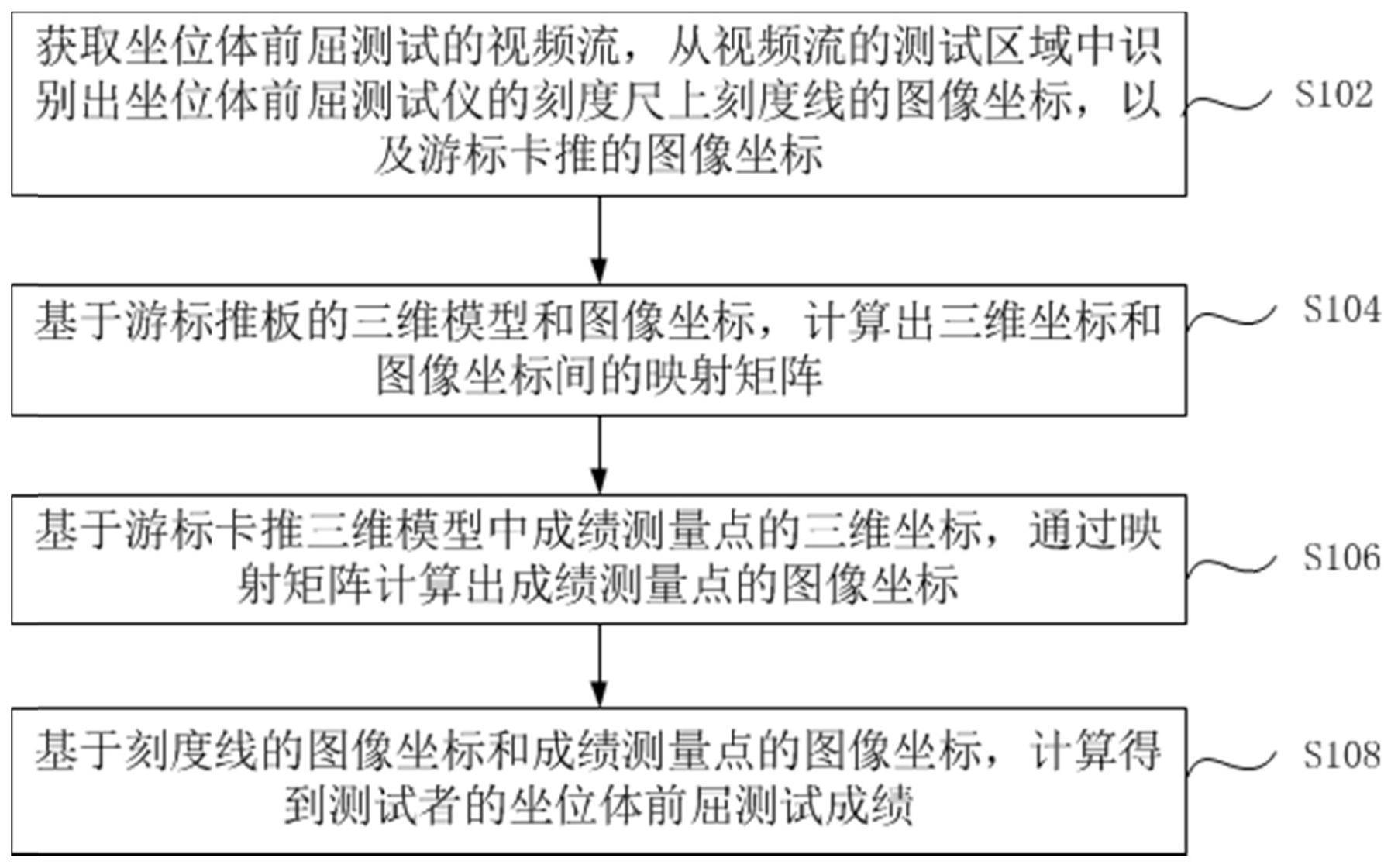
3、获取坐位体前屈测试的视频流,从视频流的测试区域中识别出坐位体前屈测试仪的刻度尺上刻度线的图像坐标,以及游标推板的图像坐标;
4、基于游标推板的三维模型和所述图像坐标,计算出三维坐标和图像坐标间的映射矩阵;
5、基于所述游标推板三维模型中成绩测量点的三维坐标,通过所述映射矩阵计算出成绩测量点的图像坐标;
6、基于所述刻度线的图像坐标和所述成绩测量点的图像坐标,计算得到测试者的坐位体前屈测试成绩。
7、在其中一些实施例中,在从视频流的测试区域中识别出坐位体前屈测试仪的刻度尺上刻度线的图像坐标之前,所述方法包括:
8、通过基于卷积神经网络的目标检测模型对所述视频流进行目标检测,得到坐位体前屈测试的测试区域,其中,所述测试区域为测试者和坐位体前屈测试仪所在的区域。
9、在其中一些实施例中,在得到进行坐位体前屈测试的测试区域之后,所述方法包括:
10、基于测试区域中的坐位体前屈测试仪,定位所述坐位体前屈测试仪的刻度尺区域,作为新的测试区域。
11、在其中一些实施例中,通过基于卷积神经网络的目标检测模型对所述视频流进行目标检测,得到坐位体前屈测试的测试区域包括:
12、通过基于卷积神经网络的目标检测模型对所述视频流中的图像帧进行逐帧检测,得到每一图像帧中坐位体前屈测试的测试区域。
13、在其中一些实施例中,从视频流的测试区域中识别出坐位体前屈测试仪的刻度尺上刻度线的图像坐标包括:
14、通过光学字符识别技术,从视频流的测试区域中识别出坐位体前屈测试仪的刻度尺上刻度线的初始图像坐标;
15、基于所述刻度线的初始图像坐标,通过霍夫变换识别计算出所述刻度线的图像坐标。
16、在其中一些实施例中,基于游标推板的三维模型和所述图像坐标,计算出三维坐标和图像坐标间的映射矩阵包括:
17、基于游标推板的三维模型和所述图像坐标,通过ransac算法计算出三维坐标和图像坐标间的映射矩阵。
18、在其中一些实施例中,基于所述刻度线的图像坐标和所述成绩测量点的图像坐标,计算得到所述测试者的坐位体前屈测试成绩包括:
19、若所述成绩测量点落在刻度线上,则基于所述刻度线对应的成绩,得到所述测试者的坐位体前屈测试成绩;
20、若所述成绩测量点不落在刻度线上,则通过公式l=d1/(d2+d1)*(l2–l1)+l1计算出所述测试者的坐位体前屈测试成绩,其中,d1为成绩测试点与前一刻度线的距离,d2为成绩测试点与后一刻度线的距离,l1为前一刻度线对应的测试成绩,l2为后一刻度线对应的测试成绩。
21、在其中一些实施例中,在获取坐位体前屈测试的视频流之后,所述方法包括:
22、从所述视频流的测试区域中识别提取出测试者的人体骨骼点,基于所述人体骨骼点判断所述测试者的测试动作是否满足预设测试要求;
23、在测试者的测试动作满足预设测试要求的情况下,进行所述测试者的坐位体前屈测试成绩计算。
24、在其中一些实施例中,获取坐位体前屈测试的视频流包括:
25、通过摄像头采集坐位体前屈测试的视频流,或从数据库中获取坐位体前屈测试的视频流。
26、第二方面,本申请实施例提供了一种坐位体前屈的测量系统,所述系统用于执行上述第一方面中任一项所述的方法,所述系统包括数据获取模块、识别提取模块和成绩计算模块;
27、所述数据获取模块,用于获取坐位体前屈测试的视频流;
28、所述识别提取模块,用于从视频流的测试区域中识别出坐位体前屈测试仪的刻度尺上刻度线的图像坐标,以及游标推板的图像坐标;基于游标推板的三维模型和所述图像坐标,计算出三维坐标和图像坐标间的映射矩阵;基于所述游标推板三维模型中成绩测量点的三维坐标,通过所述映射矩阵计算出成绩测量点的图像坐标;
29、所述成绩计算模块,用于根据所述刻度线的图像坐标和所述成绩测量点的图像坐标,计算得到测试者的坐位体前屈测试成绩。
30、相比于相关技术,本申请实施例提供的一种坐位体前屈的测量方法和系统,其中,该方法通过获取坐位体前屈测试的视频流,从视频流的测试区域中识别出坐位体前屈测试仪的刻度尺上刻度线的图像坐标,以及游标推板的图像坐标;基于游标推板的三维模型和图像坐标,计算出三维坐标和图像坐标间的映射矩阵;基于游标推板三维模型中成绩测量点的三维坐标,通过映射矩阵计算出成绩测量点的图像坐标;基于刻度线的图像坐标和成绩测量点的图像坐标,计算得到测试者的坐位体前屈测试成绩。解决了如何提高坐位体前屈成绩测量的准确率,实现了坐位体前屈测量的自动化,基于坐位体前屈测试仪中游标推板的三维模型的坐标计算,使得成绩测量的精准度更高。
技术特征:
1.一种坐位体前屈的测量方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,在从视频流的测试区域中识别出坐位体前屈测试仪的刻度尺上刻度线的图像坐标之前,所述方法包括:
3.根据权利要求2所述的方法,其特征在于,在得到进行坐位体前屈测试的测试区域之后,所述方法包括:
4.根据权利要求2所述的方法,其特征在于,通过基于卷积神经网络的目标检测模型对所述视频流进行目标检测,得到坐位体前屈测试的测试区域包括:
5.根据权利要求1所述的方法,其特征在于,从视频流的测试区域中识别出坐位体前屈测试仪的刻度尺上刻度线的图像坐标包括:
6.根据权利要求1所述的方法,其特征在于,基于游标推板的三维模型和所述图像坐标,计算出三维坐标和图像坐标间的映射矩阵包括:
7.根据权利要求1所述的方法,其特征在于,基于所述刻度线的图像坐标和所述成绩测量点的图像坐标,计算得到所述测试者的坐位体前屈测试成绩包括:
8.根据权利要求1所述的方法,其特征在于,在获取坐位体前屈测试的视频流之后,所述方法包括:
9.根据权利要求1所述的方法,其特征在于,获取坐位体前屈测试的视频流包括:
10.一种坐位体前屈的测量系统,其特征在于,所述系统用于执行权利要求1至9任一项所述的方法,所述系统包括数据获取模块、识别提取模块和成绩计算模块;
技术总结
本申请涉及一种坐位体前屈的测量方法和系统,其中,该方法包括:获取坐位体前屈测试的视频流,从视频流的测试区域中识别出坐位体前屈测试仪的刻度尺上刻度线的图像坐标,以及游标推板的图像坐标;基于游标推板的三维模型和图像坐标,计算出三维坐标和图像坐标间的映射矩阵;基于游标推板三维模型中成绩测量点的三维坐标,通过映射矩阵计算出成绩测量点的图像坐标;基于刻度线的图像坐标和成绩测量点的图像坐标,计算得到测试者的坐位体前屈测试成绩。解决了如何提高坐位体前屈成绩测量的准确率,实现了坐位体前屈测量的自动化,基于坐位体前屈测试仪中游标推板的三维模型的坐标计算,使得成绩测量的精准度更高。
技术研发人员:彭珂凡,童文军,曹密,朱文涛,许波
受保护的技术使用者:浙江大沩人工智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!