点云数据处理方法、装置、计算机设备及存储介质与流程
本发明涉及人工智能,尤其涉及一种点云数据处理方法、装置、计算机设备及存储介质。
背景技术:
1、随着科学技术的快速发展,3d同步定位与建图(simultaneous localization andmapping,slam)技术已经逐渐融入人们的生活,如扫地机器人、送餐机器人及自动驾驶汽车等产品中均涉及slam技术。
2、slam技术实现流程主要包括以下几个阶段:(1)传感器获取数据、(2)前端里程计、(3)后端优化、(4)回环检测、(5)建图。其中,前段里程计主要用于对点云获取装置获取到点云数据进行处理,如,对激光雷达获取到点云数据进行,得到变换矩阵,进而根据变换矩阵得到3d环境地图。
3、但是,现有技术在通过前端里程计生成变换矩阵时,仅估算两帧点云数据的运动,没有考虑点云获取装置在运动过程中导致获取到的点云数据发生畸变的问题,导致最终获得到的3d环境地图精度较低。
技术实现思路
1、本发明实施例公开的一种点云数据处理方法、装置、计算机设备及存储介质,以解决因点云获取装置在运动过程中获取到点云数据存在畸变而导致最终得到的3d环境地图精度较低的问题。
2、本发明公开了一种点云数据处理方法,所述方法包括:
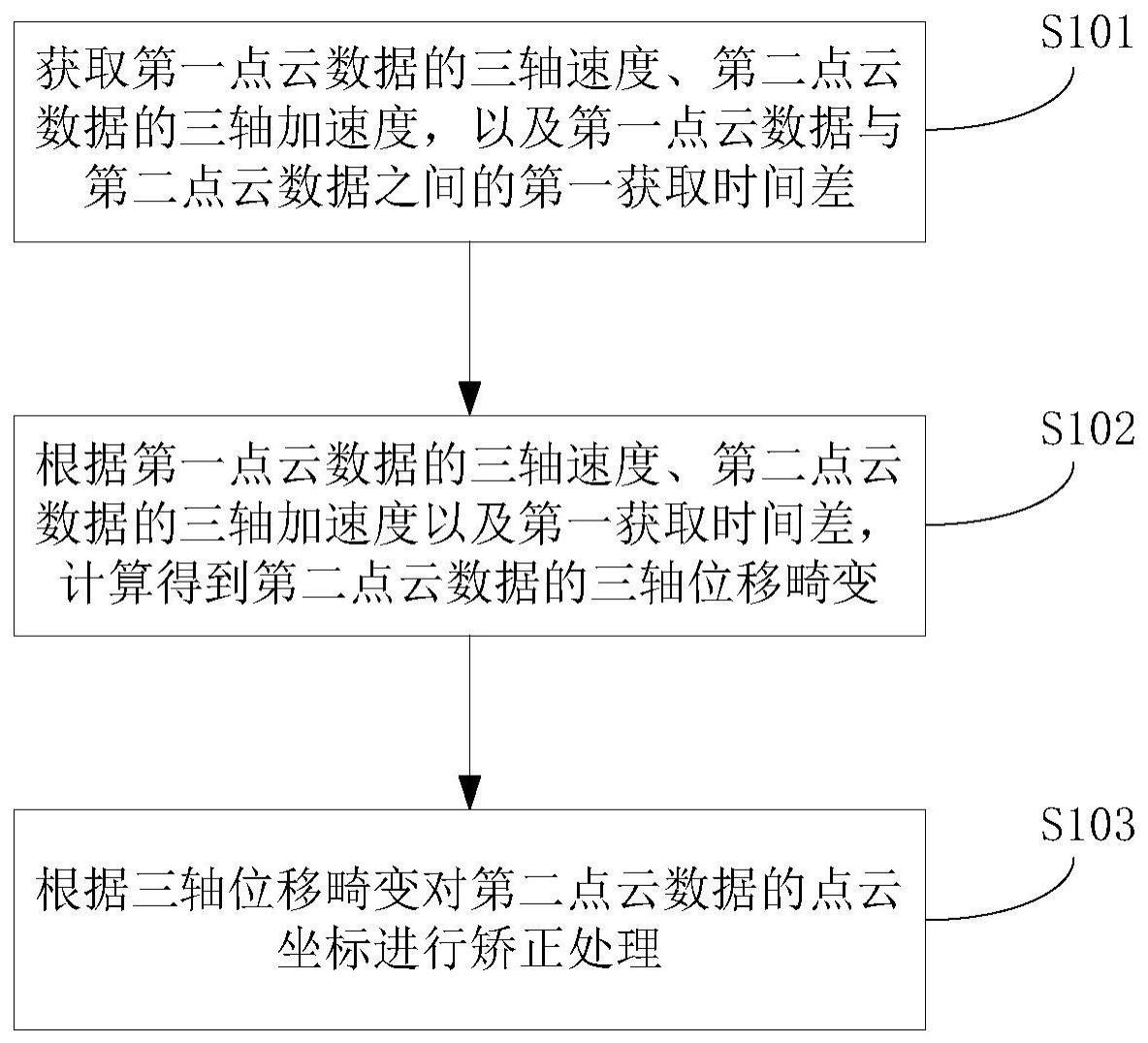
3、获取第一点云数据的三轴速度、第二点云数据的三轴加速度,以及所述第一点云数据与所述第二点云数据之间的第一获取时间差;所述第一点云数据和所述第二点云数据为点云获取装置在匀加速运动过程中连续获取到的两帧点云数据;
4、根据所述第一点云数据的三轴速度、所述第二点云数据的三轴加速度以及所述第一获取时间差,计算得到所述第二点云数据的三轴位移畸变;
5、根据所述三轴位移畸变对所述第二点云数据的坐标进行矫正处理。
6、上述方法,可选的,所述根据所述第一点云数据的三轴速度、所述第二点云数据的三轴加速度以及所述第一获取时间差,计算得到所述第二点云数据的三轴位移畸变,包括:
7、将所述第一点云数据在世界坐标系x轴方向上的速度、所述第二点云数据在世界坐标系x轴方向上的加速度以及所述第一获取时间差输入到位移畸变计算公式,得到x轴位移畸变;
8、将所述第一点云数据在世界坐标系y轴方向上的速度、所述第二点云数据在世界坐标系y轴方向上的加速度以及所述第一获取时间差输入到所述位移畸变计算公式,得到y轴位移畸变;
9、将所述第一点云数据在世界坐标系z轴方向上的速度、所述第二点云数据在世界坐标系z轴方向上的加速度以及所述第一获取时间差输入到所述位移畸变计算公式,得到z轴位移畸变。
10、上述方法,可选的,所述位移畸变计算公式为:
11、
12、其中,s为所述第二点云数据在世界坐标系对应轴向的位移畸变、t为所述第一获取时间差、a为所述第二点云数据的在世界坐标系对应轴向的加速度、v为所述第一点云数据在世界坐标系对应轴向的速度。
13、上述方法,可选的,所述将所述第一点云数据在世界坐标系z轴方向上的速度、所述第二点云数据在世界坐标系z轴方向上的加速度以及所述第一获取时间差输入到所述位移畸变计算公式,得到z轴位移畸变之前,所述方法还包括:
14、获取所述点云获取装置的重力加速度;
15、在所述第二点云数据在世界坐标系z轴方向上的加速度,减去所述重力加速度,得到所述第二点云数据在世界坐标系z轴方向上的矫正加速度;
16、所述将所述第一点云数据在世界坐标系z轴方向上的速度、所述第二点云数据在世界坐标系z轴方向上的加速度以及所述第一获取时间差输入到所述位移畸变计算公式,得到z轴位移畸变,包括:
17、将所述第一点云数据在世界坐标系z轴方向上的速度、所述矫正加速度以及所述第一获取时间差输入到所述位移畸变计算公式,得到z轴位移畸变。
18、上述方法,可选的,所述获取第一点云数据的三轴速度,包括:
19、判断所述第一点云数据是否为所述点云获取装置在匀加速运动过程中获取到的第一帧点云数据;
20、若所述第一点云数据是所述点云获取装置在匀加速运动过程中获取到的第一帧点云数据,则确定所述第一点云数据的三轴速度均为0;
21、若所述第一点云数据不是所述点云获取装置在匀加速运动过程中获取到的第一帧点云数据,获取第三点云数据的三轴速度、所述第一点云数据的三轴加速度以及所述第三点云数据和所述第一点云数据的第二获取时间差;所述第三点云数据为所述第一点云数据的上一帧点云数据;
22、将所述第三点云数据的三轴速度、所述第一点云数据的三轴加速度以及所述第二获取时间差,输入到速度计算公式,得到第一点云数据的三轴速度。
23、上述方法,可选的,所述速度计算公式为:
24、v=v'+at
25、其中,v为所述第一点云数据的在世界坐标系对应轴向的速度、v'为所述第三点云数据的在世界坐标系对应轴向的速度、t为所述第二获取时间差、a为所述第一点云数据在世界坐标系对应轴向的加速度。
26、上述方法,可选的,在所述根据所述三轴位移畸变对所述第二点云数据的坐标进行矫正处理之后,还包括:
27、根据经过点云坐标矫正处理的所述第二点云数据,得到环境地图。
28、本发明还公开了一种点云数据处理装置,包括:
29、数据获取单元,用于获取第一点云数据的三轴速度、第二点云数据的三轴加速度,以及所述第一点云数据与所述第二点云数据之间的第一获取时间差;所述第一点云数据和所述第二点云数据为点云获取装置在匀加速运动过程中连续获取到的两帧点云数据;
30、位移畸变计算单元,用于根据所述第一点云数据的三轴速度、所述第二点云数据的三轴加速度以及所述第一获取时间差,计算得到所述第二点云数据的三轴位移畸变;
31、点云矫正单元,用于根据所述三轴位移畸变对所述第二点云数据的坐标进行矫正处理。
32、本发明还公开了一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如一种点云数据处理方法的各个步骤。
33、本发明还公开了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如一种点云数据处理方法的各个步骤。
34、可以看出,上述一种点云数据处理方法、装置、计算机设备及存储介质,通过获取第一点云数据的三轴速度、第二点云数据的三轴加速度,以及第一点云数据与第二点云数据之间的第一获取时间差,来计算得到第二点云数据的点云坐标的三轴位移畸变,并根据三轴位移畸变来对第二点云数据的点云坐标进行矫正。可见,本发明中通过计算三轴位移畸变来对第二点云数据的点云坐标进行矫正,避免了因点云获取装置在运动过程中获取到点云数据存在畸变而导致最终得到的3d环境地图精度较低的问题。
技术特征:
1.一种点云数据处理方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述根据所述第一点云数据的三轴速度、所述第二点云数据的三轴加速度以及所述第一获取时间差,计算得到所述第二点云数据的三轴位移畸变,包括:
3.如权利要求2所述的方法,其特征在于,所述位移畸变计算公式为:
4.如权利要求2所述的方法,其特征在于,所述将所述第一点云数据在世界坐标系z轴方向上的速度、所述第二点云数据在世界坐标系z轴方向上的加速度以及所述第一获取时间差输入到所述位移畸变计算公式,得到z轴位移畸变之前,所述方法还包括:
5.如权利要求1所述的方法,其特征在于,所述获取第一点云数据的三轴速度,包括:
6.如权利要求5所述的方法,其特征在于,所述速度计算公式为:
7.如权利要求1所述的方法,其特征在于,在所述根据所述三轴位移畸变对所述第二点云数据的坐标进行矫正处理之后,还包括:
8.一种点云数据处理装置,其特征在于,包括:
9.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述点云数据处理方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述点云数据处理方法。
技术总结
本发明公开了一种点云数据处理方法、装置、计算机设备及存储介质,包括:获取第一点云数据的三轴速度、第二点云数据的三轴加速度,以及第一点云数据与第二点云数据之间的第一获取时间差;第一点云数据和第二点云数据为点云获取装置在匀加速运动过程中连续获取到的两帧点云数据;根据第一点云数据的三轴速度、第二点云数据的三轴加速度以及第一获取时间差,计算得到第二点云数据的三轴位移畸变;根据三轴位移畸变对第二点云数据的点云坐标进行矫正处理。可见,本发明中通过计算三轴位移畸变来对第二点云数据的点云坐标进行矫正,避免了因点云获取装置在运动过程中获取到点云数据存在畸变而导致最终得到的3D环境地图精度较低的问题。
技术研发人员:瞿晓阳,王健宗
受保护的技术使用者:平安科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!