一种用于标定发动机缸盖点云的标定方法及标定块与流程
本发明属于机器视觉,特别是涉及一种用于标定发动机缸盖点云的标定方法及标定块。
背景技术:
1、随着机器视觉技术的快速发展,机器视觉在工业领域得到广泛的应用。
2、在发动机缸盖测量工作中,传统测量方式为人工操作机器人携带三坐标测量仪,对待测量点位一一检测,此种方式测量时间长,属于抽检,不满足产线百检需求。
3、如果利用多个3d相机可实现自动化检测,但是不同相机内部的坐标系实际是一致的,这样相机获取的信息是重叠在一起的。因此,相机跟相机之间需要标定来进行坐标系的统一,也就是需要获得相机之间的变换矩阵,这样相机获取的坐标信息就可以通过变换矩阵统一到世界坐标系下。
4、传统的标定方式精度不高。
技术实现思路
1、有鉴于此,本发明旨在提出一种用于标定发动机缸盖点云的标定方法及标定块,以解决传统标定方式精度不高的问题。
2、为实现上述目的,根据本发明的一个方面,提供一种用于标定发动机缸盖点云的标定方法,包括以下步骤:
3、s1、用多个激光轮廓仪扫描标定块点云,扫描标定块顶板、第一侧板和第二侧板,全部激光轮廓仪在同一平面内;
4、s2、全部激光轮廓仪同时运动扫描标定块的对应端面,获得多组点云数据;
5、s3、计算每组点云数据圆心坐标:
6、s4、计算得到的全部圆心坐标与数模圆心坐标进行粗配准,得到旋转矩阵rcoarse和平移矩阵tcoarse;
7、s5、以顶板中间点云为基准,通过点云之间重叠部分进行精配准,得到旋转矩阵rfine和平移矩阵tfine;
8、s6、计算最终旋转矩阵r=rcoarse·rfine,平移矩阵t=tcoarse·rfine+tfine;
9、s7、通过旋转矩阵反算欧拉角,结合平移矩阵得到相机之间空间位置关系。
10、更进一步的,所述步骤s3中的圆心坐标计算包括如下步骤:
11、s31、取点云z值众数m,定义常数e=0.1,取z值在[m-e,m+e]区间内的点集n,利用最小二乘法拟合平面p;
12、s32、点集n投影在平面p上,得到新点集np;
13、s33、计算点集np中的极值点pmin,pmax;
14、s34、以x向固定点距sx,以pmin的x值为最小值,以pmax的x值为最大值,均匀间距计算x值,生成x向列表lx={x1,x2,…,xn},其中x2-x1=sx,x1=pmin.x,xn=floor((pmax.x-pmin.x)/sx)*sx+x1;
15、s35、以y向固定点距sy,以pmin的y值为最小值,以pmax的y值为最大值,均匀间距计算y值,生成y向列表ly={y1,y2,…,yn},其中y2-y1=sy,y1=pmin.y,yn=floor((pmax.y-pmin.y)/sy)*sy+y1;
16、s36、以lx和ly的全排列构建点集nq,初始化nq.z=0;
17、s37、构建三角网格;
18、s38、在xoy平面内,循环计算npi在nq中的最近邻点nqj,使nqj.z=npi.z;
19、s39、在xoy平面内,循环计算npi在nq中的最近邻点nqj,使nqj.z=npi.z;
20、s310、用孔洞拟合圆计算圆心坐标;
21、s311、圆心坐标投影至平面p上。
22、更进一步的,所述步骤s1中,用5个激光轮廓仪扫描标定块点云,其中标定块顶板上方并排布置3个激光轮廓仪,标定块的第一侧板和第二侧板各布置1个激光轮廓仪。
23、更进一步的,所述步骤s2中获得5组点云数据。
24、更进一步的,所述步骤s4中的粗配准方式为:使用svd算法解算旋转平移矩阵。
25、更进一步的,所述步骤s5中的精配准方式为:使用icp算法解算旋转平移矩阵。
26、更进一步的,所述步骤s7中的旋转矩阵反算欧拉角方式为:三个轴x,y,z的欧拉角分别为α,β,γ,正弦值、余弦值分别sx,cx,sy,cy,sz,cz,通过方程
27、可得:
28、
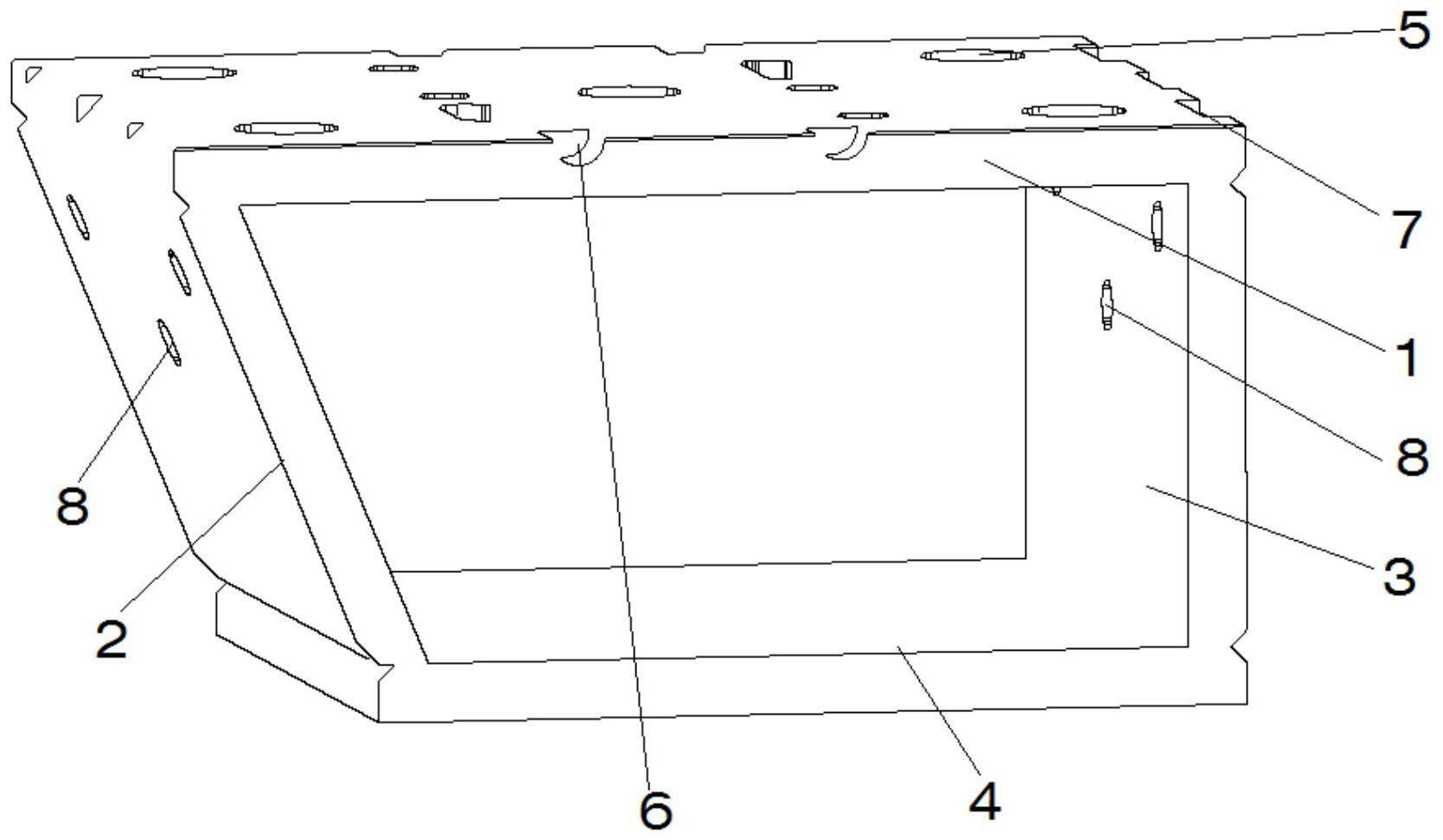
29、根据本发明的另一个方面,提供一种使用上述的一种用于标定发动机缸盖点云的标定方法的标定块,包括顶板、第一侧板、第二侧板和底板,所述顶板左右两端通过第一侧板和第二侧板与底板的左右两端相连,所述顶板、第一侧板、第二侧板和底板整体呈回字形框架,所述顶板上端面设置多个第一通孔和多个第一凹槽,所述顶板左右两端端面上均设置多个第二凹槽,所述第一侧板上设置有多个第二通孔,所述第二侧板上设置有多个第二通孔。
30、更进一步的,所述顶板上端面设置9个第一通孔、6个第一凹槽,所述顶板前后两端端面上均设置3个第二凹槽,所述顶板与第一侧板的夹角为67.5°。
31、更进一步的,所述第一侧板上设置3个第二通孔,所述第二侧板上设置3个第二通孔。
32、与现有技术相比,本发明的有益效果是:
33、1、本方法能够将多个相机的坐标信息统一到世界坐标系下;
34、2、本方法统一后的世界坐标系精度高;
35、3、对于分辨率54μm,1920激光线轮廓点数的点云,经过标定块标定精度为0.07mm。
技术特征:
1.一种用于标定发动机缸盖点云的标定方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种用于标定发动机缸盖点云的标定方法,其特征在于,所述步骤s3中的圆心坐标计算包括如下步骤:
3.根据权利要求1所述的一种用于标定发动机缸盖点云的标定方法,其特征在于:所述步骤s1中,用5个激光轮廓仪扫描标定块点云,其中标定块顶板(1)上方并排布置3个激光轮廓仪,标定块的第一侧板(2)和第二侧板(3)各布置1个激光轮廓仪。
4.根据权利要求1所述的一种用于标定发动机缸盖点云的标定方法,其特征在于:所述步骤s2中获得5组点云数据。
5.根据权利要求1所述的一种用于标定发动机缸盖点云的标定方法,其特征在于,所述步骤s4中的粗配准方式为:使用svd算法解算旋转平移矩阵。
6.根据权利要求1所述的一种用于标定发动机缸盖点云的标定方法,其特征在于:所述步骤s5中的精配准方式为:使用icp算法解算旋转平移矩阵。
7.根据权利要求1所述的一种用于标定发动机缸盖点云的标定方法,其特征在于:所述步骤s7中的旋转矩阵反算欧拉角方式为:三个轴x,y,z的欧拉角分别为α,β,γ,正弦值、余弦值分别sx,cx,sy,cy,sz,cz,通过方程
8.一种使用如权利要求1-7中任一项所述的一种用于标定发动机缸盖点云的标定方法的标定块,其特征在于:包括顶板(1)、第一侧板(2)、第二侧板(3)和底板(4),所述顶板(1)左右两端通过第一侧板(2)和第二侧板(3)与底板(4)的左右两端相连,所述顶板(1)、第一侧板(2)、第二侧板(3)和底板(4)整体呈回字形框架,所述顶板(1)上端面设置多个第一通孔(5)和多个第一凹槽(6),所述顶板(1)左右两端端面上均设置多个第二凹槽(7),所述第一侧板(2)上设置有多个第二通孔(8),所述第二侧板(3)上设置有多个第二通孔(8)。
9.根据权利要求8所述的一种用于标定发动机缸盖点云的标定方法,其特征在于:所述顶板(1)上端面设置9个第一通孔(5)、6个第一凹槽(6),所述顶板(1)左右两端端面上均设置3个第二凹槽(7),所述顶板(1)与第一侧板(2)的夹角为67.5°。
10.根据权利要求8所述的一种用于标定发动机缸盖点云的标定方法,其特征在于:所述第一侧板(2)上设置3个第二通孔(8),所述第二侧板(3)上设置3个第二通孔(8)。
技术总结
本发明提出了一种用于标定发动机缸盖点云的标定方法及标定块,属于机器视觉技术领域。解决传统标定方式精度不高的问题。一种用于标定发动机缸盖点云的标定方法,包括以下步骤:S1、用多个激光轮廓仪扫描标定块点云;S2、全部激光轮廓仪同时运动扫描标定块的对应端面,获得多组点云数据;S3、计算每组点云数据圆心坐标:S4、计算得到的全部圆心坐标与数模圆心坐标粗配准,得到旋转矩阵R<subgt;Coarse</subgt;和平移矩阵T<subgt;Coarse</subgt;;S5、通过点云之间重叠部分进行精配准,得到旋转矩阵R<subgt;Fine</subgt;和平移矩阵T<subgt;Fine</subgt;;S6、计算最终旋转矩阵R=R<subgt;Coarse</subgt;·R<subgt;Fine</subgt;,平移矩阵T=T<subgt;Coarse</subgt;·R<subgt;Fine</subgt;+T<subgt;Fine</subgt;;S7、反算欧拉角,结合平移矩阵得到相机之间空间位置关系。它主要用于将相机获取的坐标信息统一到世界坐标系下。
技术研发人员:洪天昊,王荔岩,李鹏堂,罗巍
受保护的技术使用者:哈尔滨耐是智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!