一种基于无监督学习的系统参数辨识方法和装置
本说明书涉及系统参数辨识,尤其涉及一种基于无监督学习的系统参数辨识方法、装置、电子设备和存储介质。
背景技术:
1、系统参数辨识技术是一种将理论模型与试验数据结合起来用于参数预测的技术,其原理是根据试验数据和构建的对应系统模型来确定一组模型的参数,使得由模型计算得到的参数结果能最好地拟合测试数据,即可视为一种曲线拟合问题,从而对未知参数预测提供一定的理论指导。通常在具体预测过程中,首先对系统建立一个状态空间模型,用这个模型对试验测量结果进行预测。当预测结果与实测结果相符合,认为此模型具有较高的可信度。目前针对系统进行参数辨识的方法主要包括:最经典的最小二乘法、最大似然估计法、粒子群算法以及神经网络算法等。其中,最小二乘法数据处理量大,方法构造简单,参数设置无需任何经验;最大似然估计法在输入数据中测量噪声会影响参数估计的精度;粒子群算法简单有效,可以通过不断迭代寻优搜索最佳参数;有监督的神经网络算法需要大量实际试验结果作为训练集,才能识别未知系统的参数数值。因此,如何在无需提前对神经网络模型训练的情况下,即可实现对系统状态空间模型的辨识,通过模型的迭代训练获得参数最优结果,是亟待解决的技术问题。
技术实现思路
1、本说明书实施例的目的是针对上述问题,提供一种基于无监督学习的系统参数辨识方法、装置、电子设备和存储介质。
2、为解决上述技术问题,本说明书实施例是这样实现的:
3、第一方面,提出一种基于无监督学习的系统参数辨识方法,包括:
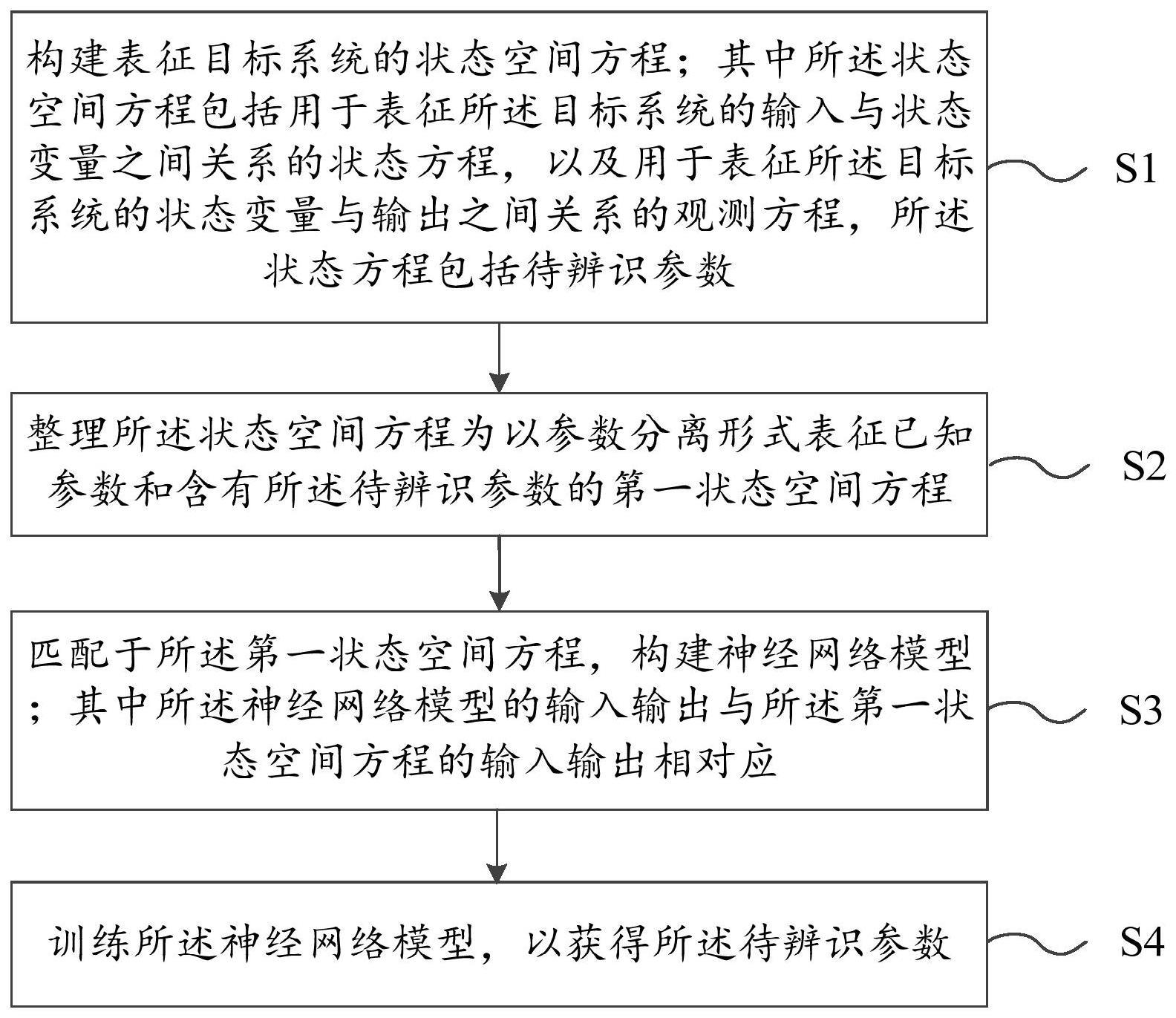
4、构建表征目标系统的状态空间方程;其中所述状态空间方程包括用于表征所述目标系统的输入与状态变量之间关系的状态方程,以及用于表征所述目标系统的状态变量与输出之间关系的观测方程;所述状态方程包括待辨识参数;
5、整理所述状态空间方程为以参数分离形式表征已知参数和含有所述待辨识参数的第一状态空间方程;
6、匹配于所述第一状态空间方程,构建神经网络模型;其中所述神经网络模型的输入输出与所述第一状态空间方程的输入输出相对应;
7、训练所述神经网络模型,以获得所述待辨识参数。
8、进一步地,所述状态方程由包括状态矢量、输入矢量、系统状态矩阵和输入/控制矩阵在内的参数进行表征;所述观测方程由包括状态矢量、输出矢量、观测矩阵和直传递矩阵在内的参数进行表征。
9、进一步地,整理所述状态空间方程为以参数分离形式表征已知变量和含有所述待辨识参数的第一状态空间方程,包括:
10、代入所述观测方程至所述状态方程中;
11、将含有所述待辨识参数的待辨识项与所述已知变量分离,并合并同类项;
12、依据所述待辨识参数和所述已知变量的物理特性,调整表达形式为方程等号的右侧表征为含有所述待辨识参数与已知输入变量相乘且方程等号的左侧为已知输出变量的所述第一状态空间方程。
13、进一步地,依据所述待辨识参数和所述已知变量的物理特性确定所述待辨识参数的取值正负和/或取值范围。
14、进一步地,匹配于所述第一状态空间方程,构建神经网络模型,包括依据所述第一状态空间方程中所述待辨识参数和/或含有所述待辨识参数的待辨识项的物理特性,构建包括一种或多种神经网络结构的所述神经网络模型。
15、进一步地,所述神经网络模型的结构参数与所述第一状态空间方程的待辨识参数相对应;其中所述结构参数包括自定义层数和自定义激活函数。
16、进一步地,训练所述神经网络模型,以获得所述待辨识参数,包括:
17、确定所述神经网络模型的训练参数;其中所述训练参数包括损失函数、优化器和学习率;
18、依据优化预设轮次和/或优化验证结果调整学习率,并计算所述损失函数至收敛稳定状态;
19、获取所述神经网络模型的结构参数,并整理输出所述待辨识参数。
20、第二方面,提出一种基于无监督学习的系统参数辨识装置,包括:
21、第一模块,用于构建表征目标系统的状态空间方程;其中所述状态空间方程包括用于表征所述目标系统的输入与状态变量之间关系的状态方程,以及用于表征所述目标系统的状态变量与输出之间关系的观测方程;所述状态方程包括待辨识参数;
22、第二模块,用于整理所述状态空间方程为以参数分离形式表征已知参数和含有所述待辨识参数的第一状态空间方程;
23、第三模块,用于匹配于所述第一状态空间方程,构建神经网络模型;其中所述神经网络模型的输入输出与所述第一状态空间方程的输入输出相对应;
24、第四模块,用于训练所述神经网络模型,以获得所述待辨识参数。
25、第三方面,提出一种电子设备,包括:处理器;以及被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行第一方面所述的基于无监督学习的系统参数辨识方法。
26、第四方面,提出一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被包括多个应用程序的电子设备执行时,使得所述电子设备执行第一方面所述的基于无监督学习的系统参数辨识方法。
27、本说明书至少可以达到以下技术效果:
28、本发明方案通过构建目标系统状态空间方程,将观测方程代入状态方程并整理方程形式,将方程中已知变量和待辨识参数分离,再确认待辨识项的正负以及取值范围并改写方程形式,搭建神经网络模型,将已知获得的输入输出与模型对应,将待辨识项作为模型内部的网络结构参数,训练模型直至收敛到误差满足辨识精度需求,提取网络参数即为待辨识的系统参数,使得神经网络模型与目标系统相对应,通过对模型的无监督训练过程不断收敛实现参数辨识。
技术特征:
1.一种基于无监督学习的系统参数辨识方法,其特征在于,包括:
2.根据权利要求1所述的基于无监督学习的系统参数辨识方法,其特征在于,所述状态方程由包括状态矢量、输入矢量、系统状态矩阵和输入/控制矩阵在内的参数进行表征;所述观测方程由包括状态矢量、输出矢量、观测矩阵和直传递矩阵在内的参数进行表征。
3.根据权利要求1所述的基于无监督学习的系统参数辨识方法,其特征在于,整理所述状态空间方程为以参数分离形式表征已知变量和含有所述待辨识参数的第一状态空间方程,包括:
4.根据权利要求3所述的基于无监督学习的系统参数辨识方法,其特征在于,依据所述待辨识参数和所述已知变量的物理特性确定所述待辨识参数的取值正负和/或取值范围。
5.根据权利要求1所述的基于无监督学习的系统参数辨识方法,其特征在于,匹配于所述第一状态空间方程,构建神经网络模型,包括依据所述第一状态空间方程中所述待辨识参数和/或含有所述待辨识参数的待辨识项的物理特性,构建包括一种或多种神经网络结构的所述神经网络模型。
6.根据权利要求5所述的基于无监督学习的系统参数辨识方法,其特征在于,所述神经网络模型的结构参数与所述第一状态空间方程的待辨识参数相对应;其中所述结构参数包括自定义层数和自定义激活函数。
7.根据权利要求1所述的基于无监督学习的系统参数辨识方法,其特征在于,训练所述神经网络模型,以获得所述待辨识参数,包括:
8.一种基于无监督学习的系统参数辨识装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被包括多个应用程序的电子设备执行时,使得所述电子设备执行权利要求1至7任一项所述的基于无监督学习的系统参数辨识方法。
技术总结
本发明公开了一种基于无监督学习的系统参数辨识方法和装置,其中所述方法,包括:构建表征目标系统的状态空间方程,所述状态空间方程包括用于表征目标系统的输入与状态变量之间关系的状态方程,以及用于表征目标系统的状态变量与输出之间关系的观测方程,所述状态方程包括待辨识参数;整理状态空间方程为以参数分离形式表征已知参数和含有待辨识参数的第一状态空间方程;匹配于第一状态空间方程,构建神经网络模型,所述神经网络模型的输入输出与第一状态空间方程的输入输出相对应;训练神经网络模型,以获得待辨识参数。本发明方案通过构建目标系统状态空间方程与对应的神经网络模型,在模型的无监督训练不断收敛的过程中实现参数辨识。
技术研发人员:杨世春,张正杰,常柏桐,郑一帆,闫啸宇,周思达,曹耀光,刘新华
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!