一种免杂波密度需求的目标跟踪方法
本发明涉及多目标跟踪,尤其涉及一种免杂波密度需求的目标跟踪方法。
背景技术:
1、在存在数据关联不确定、漏检和杂波环境下,自适应δ-广义标签多伯努利(adaptiveδ-generalized labeled multi-bernoulli,aglmb)滤波器能较为有效地跟踪多机动目标。但aglmb滤波器仍然需要杂波密度和幸存概率等先验参数,而且其计算复杂度高,计算量大。如何建立无需杂波密度和幸存概率等先验参数、计算速度快的多机动目标跟踪滤波器是当前亟需探索和解决的问题。
技术实现思路
1、为解决相关技术中需要杂波密度和幸存概率等先验参数进行目标跟踪,降低计算复杂度,本发明提出了一种免杂波密度需求的目标跟踪方法。
2、该方法包括:
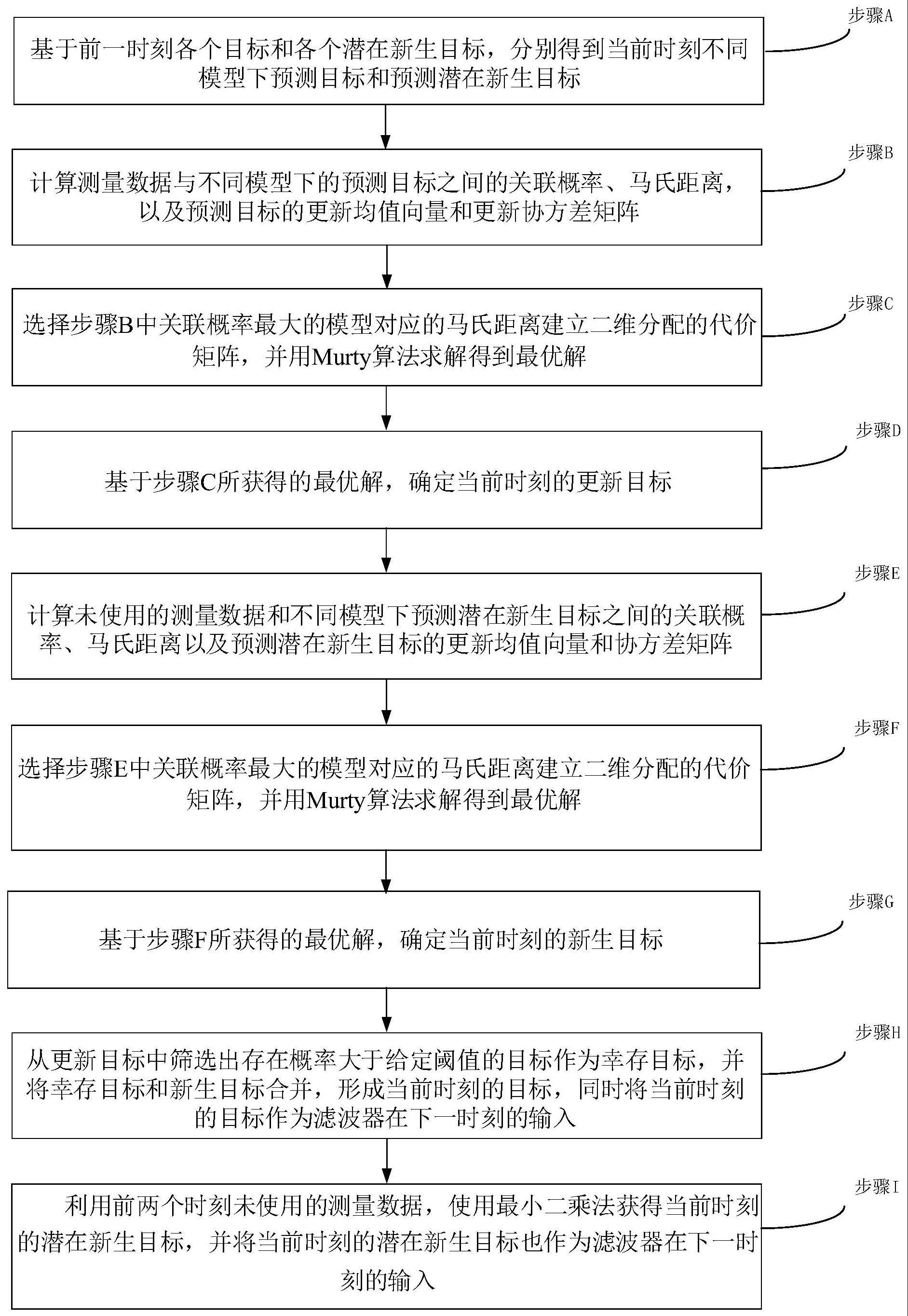
3、步骤a:基于前一时刻各个目标和各个潜在新生目标,分别得到当前时刻不同模型下预测目标和预测潜在新生目标;
4、步骤b:计算测量数据与不同模型下的预测目标之间的关联概率、马氏距离,以及预测目标的更新均值向量和更新协方差矩阵;
5、步骤c:选择步骤b中关联概率最大的模型对应的马氏距离建立二维分配的代价矩阵,并用murty算法求解得到最优解;
6、步骤d:基于步骤c所获得的最优解,确定当前时刻的更新目标;
7、步骤e:计算未使用的测量数据和不同模型下预测潜在新生目标之间的关联概率、马氏距离以及预测潜在新生目标的更新均值向量和协方差矩阵;
8、步骤f:选择步骤e中关联概率最大的模型对应的马氏距离建立二维分配的代价矩阵,并用murty算法求解得到最优解;
9、步骤g:基于步骤f所获得的最优解,确定当前时刻的新生目标;
10、步骤h:从更新目标中筛选出存在概率大于给定阈值的目标作为幸存目标,并将幸存目标和新生目标合并,形成当前时刻的目标,同时将当前时刻的目标作为滤波器在下一时刻的输入;
11、步骤i:利用前两个时刻未使用的测量数据,使用最小二乘法获得当前时刻的潜在新生目标,并将当前时刻的潜在新生目标也作为滤波器在下一时刻的输入。
12、考虑到相关技术中在进行目标跟踪时,计算复杂度高,计算量大,需要用到杂波密度和幸存概率等先验参数,通过上述方法,根据预测得到的目标与测量数据之间的马氏距离,以及潜在新生目标与未使用的测量数据之间的马氏距离,分别构建代价矩阵,避免了杂波密度和幸存概率等先验参数,降低了目标跟踪过程中的计算复杂度和计算量。同时,通过测量数据、预测得到的目标和潜在新生目标确定当前时刻的各个目标,通过连续两个时刻未使用的测量数据,确定当前时刻的潜在新生目标,充分使用到了测量数据在目标跟踪中的作用,使得目标跟踪的精度更高。
13、在一种可选的实施方式中,前一时刻的目标和潜在新生目标分别表示为:
14、
15、
16、其中,k-1表示前一时刻,k表示当前时刻,和分别表示k-1时刻目标的存在概率、轨迹标签、模型标签和k-1时刻目标的数目;εi,k-1、和分别表示k-1时刻与潜在新生目标i相关联的测量索引、潜在新生目标的存在概率、轨迹标签、模型标签以及k-1时刻潜在新生目标的数目;和表示k-1时刻目标的均值向量和协方差矩阵,表示k-2时刻潜在新生目标i的均值向量,和表示k-1时刻潜在新生目标的均值向量和协方差矩阵;
17、计算得到的当前时刻不同模型下的预测目标表示为:
18、
19、其中,ti,k=1,2,l,mr表示模型标签,mr表示所使用的模型总数,表示预测目标在模型ti,k下的预测存在概率,和分别表示预测轨迹标签和预测模型标签,和分别表示预测目标在模型ti,k下的预测均值向量和协方差矩阵;并且有:
20、
21、
22、其中,ρ(ti,k|ti,k-1)是马尔可夫一步转移概率,φk-1(ti,k)是模型ti,k对应的状态转移矩阵,qk-1(ti,k)是模型ti,k下的协方差;
23、计算得到当前时刻不同模型下的预测潜在新生目标表示为:
24、
25、其中,表示预测潜在新生目标在模型ti,k下的预测存在概率,和分别表示预测轨迹标签和预测模型标签,和分别表示预测潜在新生目标在模型ti,k下的预测均值向量和协方差;并且有:
26、
27、
28、在模型ti,k下预测目标的预测测量向量和它的误差协方差矩阵为:
29、
30、在模型ti,k下预测潜在新生目标的预测测量向量和它的误差协方差矩阵为:
31、
32、其中,hk是观测矩阵。
33、在一种可选的实施方式中,测量数据与不同模型下预测目标之间的关联概率表示为:
34、
35、其中,表示k时刻的测量数据,mk表示测量数据的数目,zj,k表示第j个测量数据;pd是检测概率,rk是观测噪声协方差;
36、模型ti,k下测量数据zj,k与预测目标之间的马氏距离表示为:
37、
38、并且,服从自由度为n的卡方分布,其中n是观测数据zj,k的维度;给定一个置信度水平α,可得到一个接收阈值qα,如果判定测量数据zj,k落入了预测目标i的接收门内;
39、模型ti,k下预测目标i的更新均值向量和协方差矩阵分别表示为:
40、
41、
42、其中,
43、在一种可选的实施方式中,预测目标i与测量数据zj,k的关联概率最大的模型表示为:
44、
45、关联概率最大的模型对应的马氏距离为:
46、
47、以马氏距离为代价建立二维分配的代价矩阵,表示为:
48、c=[c1 c2]
49、其中:
50、
51、使用最优murty算法求得代价矩阵的最优解为
52、在一种可选的实施方式中,若1≤θi≤mk,则表明测量数据zj,k与预测目标i相关联,取j=θi,选择关联概率最大模型对应的均值向量和协方差矩阵作为当前时刻预测目标i的更新均值向量和协方差矩阵,分别表示为:
53、
54、预测目标i的更新存在概率、更新模型标签和更新轨迹标签分别表示为:
55、
56、将初始值为0的二值变量gj,k(j=1,2,l,mk)设为1,即gj,k=1,用于标记测量数据zj,k已被使用;
57、若θi>mk,认为预测目标i漏检,预测目标i的更新均值向量和更新协方差矩阵分别取为:
58、
59、预测目标i的更新存在概率、更新模型标签和更新轨迹标签分别表示为:
60、
61、由上述步骤可以得到当前时刻的更新目标表示为:
62、
63、在一种可选的实施方式中,整理k时刻未使用的测量数据,得到未使用的测量数据表示为:
64、
65、其中,是未被使用的测量数据总数,是第g个未被使用的测量数据;
66、计算得到不同模型下预测潜在新生目标i和未使用测量数据之间的马氏距离,表示为:
67、
68、不同模型下测量数据与预测潜在新生目标的关联概率为:
69、
70、不同模型下预测潜在新生目标i的更新均值向量和协方差矩阵分别表示为:
71、
72、
73、其中,
74、在一种可选的实施方式中,预测潜在新生目标i与测量数据的关联概率最大的模型表示为:
75、
76、关联概率最大的模型对应的马氏距离为:
77、
78、以马氏距离为代价建立二维分配的代价矩阵,表示为:
79、c=[c1 c2]
80、其中:
81、
82、用murty算法求解代价矩阵c,得到最优解其中,且
83、在一种可选的实施方式中,如果取g=θi,则测量数据被分配给预测潜在新生目标i,一个新生目标h被检测到,新生目标h的均值向量和协方差表示为:
84、
85、新生目标h的存在概率、轨迹标签和模型标签分别表示为:
86、rh,k=1,新生目标h在k-2时刻、k-1时刻的均值向量分别表示为:
87、
88、从测量数据和中移除已使用的测量数据和即:
89、
90、通过以上步骤的处理,得到k-1时刻和k时刻未使用的测量数据和以及k时刻新生目标为:
91、
92、其中,表示新生目标数,新生目标在k-2时刻、k-1时刻和k时刻的均值向量和轨迹标签集为:
93、
94、在一种可选的实施方式中,给定一个剪枝阈值τr∈[0.001,0.009],从当前时刻的更新目标中将存在概率的目标筛选出来作为幸存目标,得到k时刻的幸存目标表示为:
95、
96、其中,是幸存目标数,k时刻幸存目标的均值向量和轨迹标签集为:
97、
98、将幸存目标和新生目标合并,得到k时刻的目标为:
99、
100、其中,是k时刻的目标数;
101、合并集合和集合得到k时刻目标的均值向量和轨迹标签集集合xk作为滤波器在k时刻的输出;集合和用于补充滤波器在k-2时刻和k-1时刻的输出,表示为:
102、
103、在一种可选的实施方式中,利用前两个时刻未使用的测量数据,使用最小二乘法获得当前时刻的潜在新生目标,包括:
104、从k-1时刻未使用的测量数据和k时刻未使用的测量数据中分别选取测量数据和判断是否满足速度门限准则:
105、
106、其中,vmin和vmax分别表示最小速度和最大速度,t是扫描周期;根据满足速度门限准则的连续两个时刻未使用的测量数据形成潜在新生目标;
107、若测量数据和满足速度门限准则,一个潜在新生目标i被检测到;k-1时刻和k时刻潜在新生目标i的均值向量可以分别表示为:
108、
109、其中:
110、
111、k时刻潜在新生目标i的误差协方差为:
112、
113、潜在新生目标i表示为:
114、
115、其中,g表示测量数据的索引,εi,k=g表示测量数据与潜在新生目标i有关联;
116、重复以上步骤,可以获得潜在新生目标集为:
117、
118、其中,表示潜在新生目标数。
- 还没有人留言评论。精彩留言会获得点赞!