一种基于YOLOv7模型的高速公路车辆检测方法
本发明涉及车辆检测,特别涉及一种基于yolov7模型的高速公路车辆检测方法。
背景技术:
1、车辆检测是计算机视觉领域的重要研究方向之一。它可以应用于智能交通、自动驾驶等领域。在高速公路上,车辆密度大、速度快,传统的人工巡检方法效率低下、成本高昂。因此,采用计算机视觉技术实现对高速公路车辆的自动检测具有重要的现实意义。
2、目前,深度学习技术在目标检测领域取得了显著的成果,基于深度学习的车辆检测方法已经成为主流,它可以在单张图像中实现目标检测和分类,并且速度较快。其中yolo系列算法以其快速、准确的特点受到广泛关注。
3、但yolo系列算法存在对小目标(高速公路上的车辆)检测效果差、检测精度不高的问题。
技术实现思路
1、本发明实施例提供提供一种基于yolov7模型的高速公路车辆检测方法,能够解决对小目标检测效果差、检测精度不高的问题。
2、本发明实施例提供一种基于yolov7模型的高速公路车辆检测方法,包括:
3、获取高速公路监控视频,并分帧制作成待检测图片;
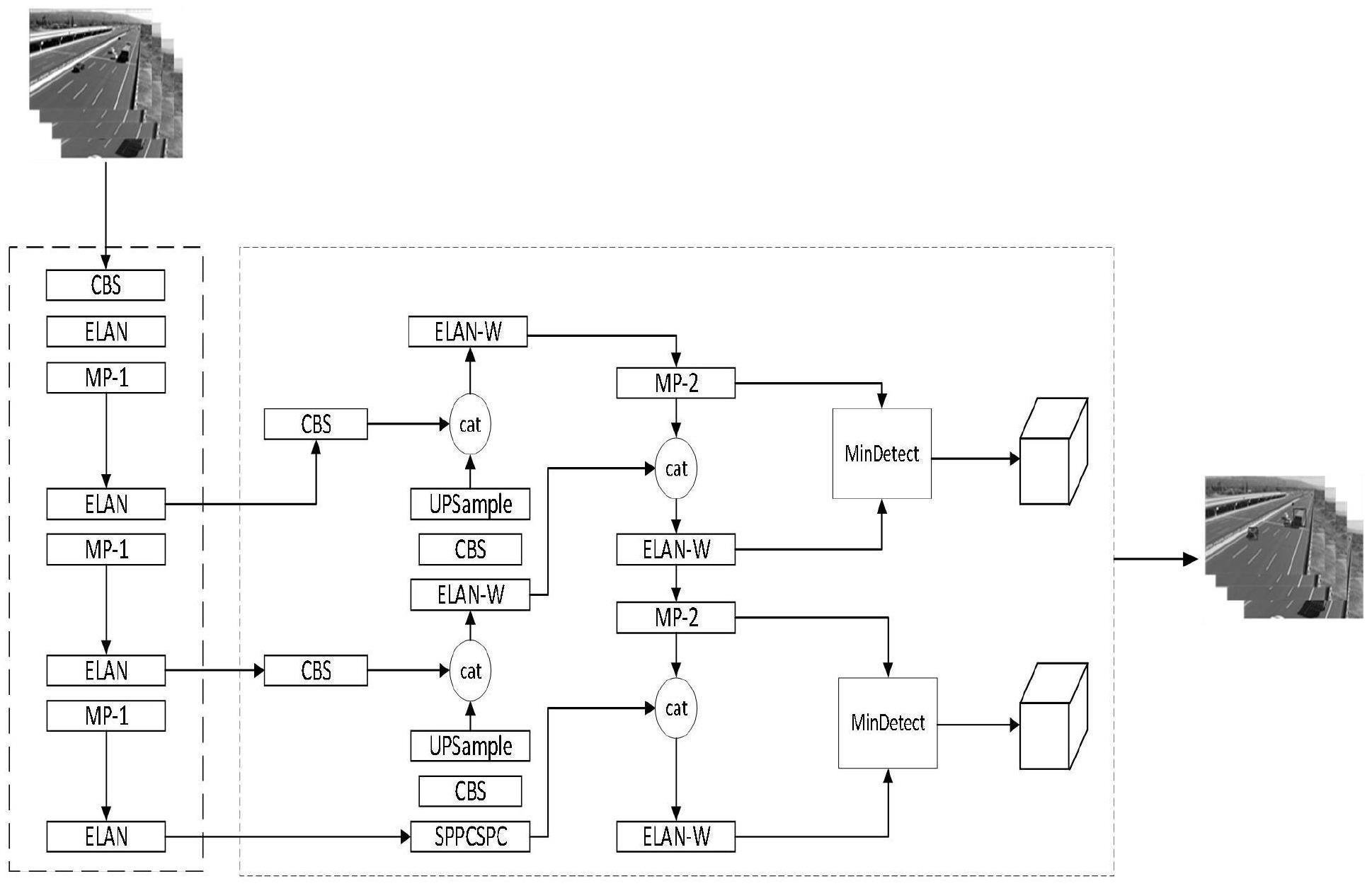
4、在yolov7模型的基础上构建车辆检测网络,所述车辆检测网络包括input层,backbone层、head层这三部分,在head层末端构建一个高度精准检测小目标车辆的mindetect模块;
5、将待检测图片输入车辆检测网络,得到不同层次、不同尺度的目标车辆特征图;
6、通过mindetect模块中的cp模块进行像素级关联融合,获得目标车辆的细节信息;
7、通过mindetect模块中的lc模块将新的特征图上不同位置之间的信息进行关联,定位目标车辆的目标边界;
8、将目标车辆的细节信息与目标车辆的目标边界相结合,得到高速公路上目标车辆的检测信息。
9、另外的,将输入图片输入车辆检测网络前需要进行预处理,包括:通过对输入图片进行图像缩放、裁剪、归一化,将输入图片对齐成640*640大小的rgb图片。
10、另外的,所述head层末端构建的mindetect模块,包括:将yolov7模型的head层的panet中mp-2模块和elan-w模块的输出作为mindetect模块的输入。
11、另外的,所述通过mindetect模块的cp模块进行像素级关联融合,其特征在于计算提取到的特征图的相关性,包括:
12、t={ti|mi*e}
13、其中,i∈(1,2,…,n),t为融合后的特征图,ti属于关联融合之后的特征图的其中之一的子图,即关联性结果;mi属于mp-2模块输出的经过卷积处理后得到的特征图m其中之一的子区域,e属于elan-w模块输出的经过卷积处理后得到的特征图。
14、另外的,所述通过mindetect模块的lc模块将特征图上不同位置之间的信息进行关联,其特征在于,包括:
15、
16、
17、其中,z(x)是归一化因子,i,j∈(1,2,…,n),ti和tj为输入特征子图,si为输出特征图的向量表示,f为特征图上不同位置之间的关联函数,g为高斯函数。
18、另外的,用mdloss损失函数评估mindetect模块的预测作用:
19、mdloss=lb+lm
20、
21、lm=-[yclogpc+(1-yc)log(1-pc)]
22、其中,yc为真实框,pc为预测框,c表示包含yc与pc的最小凸闭合框,lb为边界框损失函数,采用giou损失,u是指pc和yc围绕实际目标物体的并集区域;lm为分类损失函数,采用bce损失;
23、mdloss损失函数的取值范围在[0,1]之间,值越小代表匹配程度越高,趋近于0则表示预测结果和真实标签匹配得更好;值越大则表示匹配程度越低,趋近于1则表示预测结果和真实标签匹配得更差。
24、另外的,将目标车辆的细节信息与目标车辆的目标边界相结合后进行处理包括非极大值抑制nms、置信度筛选;nms的目的是消除重叠的检测框;置信度筛选是为了去除置信度较低的检测结果。
25、另外的,所述高速公路上车辆检测信息包括车辆类别、位置、置信度。
26、本发明实施例提供的一种基于yolov7模型的高速公路车辆检测方法,与现有技术相比,其有益效果如下:
27、本发明通过在yolov7模型的head层末端构建mindetect模块,通过mindetect模块的cp模块进行像素级关联融合,以丰富和增强车辆目标的细节信息,增强对小目标的检测效果;通过mindetect模块的lc模块将特征图上的不同位置之间的信息进行关联,进而准确定位车辆目标的目标边界,从而提高检测精度;并用mdloss损失函数评估mindetect模块的预测作用:mdloss损失函数的取值范围在[0,1]之间,值越小代表匹配程度越高,趋近于0则表示预测结果和真实标签匹配得更好;值越大则表示匹配程度越低,趋近于1则表示预测结果和真实标签匹配得更差。
技术特征:
1.一种基于yolov7模型的高速公路车辆检测方法,其特征在于,包括:
2.如权利要求1所述的一种基于yolov7模型的高速公路车辆检测方法,其特征在于,将输入图片输入车辆检测网络前需要进行预处理,包括:通过对输入图片进行图像缩放、裁剪、归一化,将输入图片对齐成640*640大小的rgb图片。
3.如权利要求1所述的一种基于yolov7模型的高速公路车辆检测方法,其特征在于,所述head层末端构建的mindetect模块,包括:将yolov7模型的head层的panet中mp-2模块和elan-w模块的输出作为mindetect模块的输入。
4.如权利要求1所述的一种基于yolov7模型的高速公路车辆检测方法,所述通过mindetect模块中的cp模块进行像素级关联融合,其特征在于计算提取到的特征图的相关性,包括:
5.如权利要求1所述的一种基于yolov7模型的高速公路车辆检测方法,所述通过mindetect模块中的lc模块将特征图上不同位置之间的信息进行关联,其特征在于,包括:
6.如权利要求1所述的一种基于yolov7模型的高速公路车辆检测方法,其特征在于,用mdloss损失函数评估mindetect模块的预测作用:
7.如权利要求1所述的一种基于yolov7模型的高速公路车辆检测方法,其特征在于,将目标车辆的细节信息与目标车辆的目标边界相结合后进行处理包括非极大值抑制nms、置信度筛选;nms的目的是消除重叠的检测框;置信度筛选是为了去除置信度较低的检测结果。
8.如权利要求1所述的一种基于yolov7模型的高速公路车辆检测方法,其特征在于,所述高速公路上车辆检测信息包括车辆类别、位置、置信度。
技术总结
本发明公开了一种基于YOLOv7模型的高速公路车辆检测方法,涉及车辆检测技术领域。包括:获取高速公路监控视频,并分帧制作成待检测图片;在YOLOv7模型的基础上构建车辆检测网络;将待检测图片输入车辆检测网络,通过CP模块进行像素级关联融合,获得目标车辆的细节信息;通过LC模块将新的特征图上不同位置之间的信息进行关联,定位目标车辆的目标边界;将CP模块获得的目标车辆的细节信息与LC模块定位的目标车辆的目标边界相结合进行后处理得到高速公路上车辆检测信息。本发明通过在YOLOv7模型的head层末端构建MinDetect模块,通过CP模块进行像素级关联融合,通过LC模块将特征图上的不同位置之间的信息进行关联,准确定位车辆目标的目标边界。
技术研发人员:高文军,宝财吉拉呼,马志强,邢宽,王鑫
受保护的技术使用者:内蒙古工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!