一种基于点云数据网格化空间存储与索引方法、装置及计算机可读存储介质与流程
本发明涉及数据处理的,尤其涉及一种基于点云数据网格化空间存储与索引方法、装置及计算机可读存储介质。
背景技术:
1、点云数据(point cloud data)是三维(或三维以上)几何模型表面采样点的集合,是分散在三维空间中的离散点集。每一个点都包含该点的三维坐标信息以及其它属性信息,但不包含任何拓扑信息。点云之间相互独立,可根据调用规则,组合成任意形状的几何模型,不需要受曲面连续性的约束。型地形影像采集方式能获取高精度地形影像高程信息的同时,也能直接获取地物的高精度三维空间信息。结合电力行业的实际应用,激光点云的数据处理仍存在问题与挑战。
2、在激光雷达点云数据中,可能包含海量的点,要获取到某个区域内的点的空间关系,直观上来讲,需要对这些海量的点逐个遍历,但是这无疑会耗费大量时间,点云数据网格化空间存储,可以将点云中的点以一定的方式存储,给每个点赋值一个区域索引,方便在查找获取空间关系的过程中,可以通过索引快速的得到点云中点的空间关系和信息,极大的缩短了查询时间,减少了查询耗费的资源。同时也可以满足快速显示,降低对硬件的需求。
技术实现思路
1、本部分的目的是在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述背景技术描述中存在的问题,提出了本发明,因此,本发明目的是提供一种基于点云数据网格化空间存储与索引方法、装置及计算机可读存储介质。
3、为解决上述技术问题,本发明采用的技术方案是:一种基于点云数据网格化空间存储与索引方法,其特征在于:包括以下步骤;
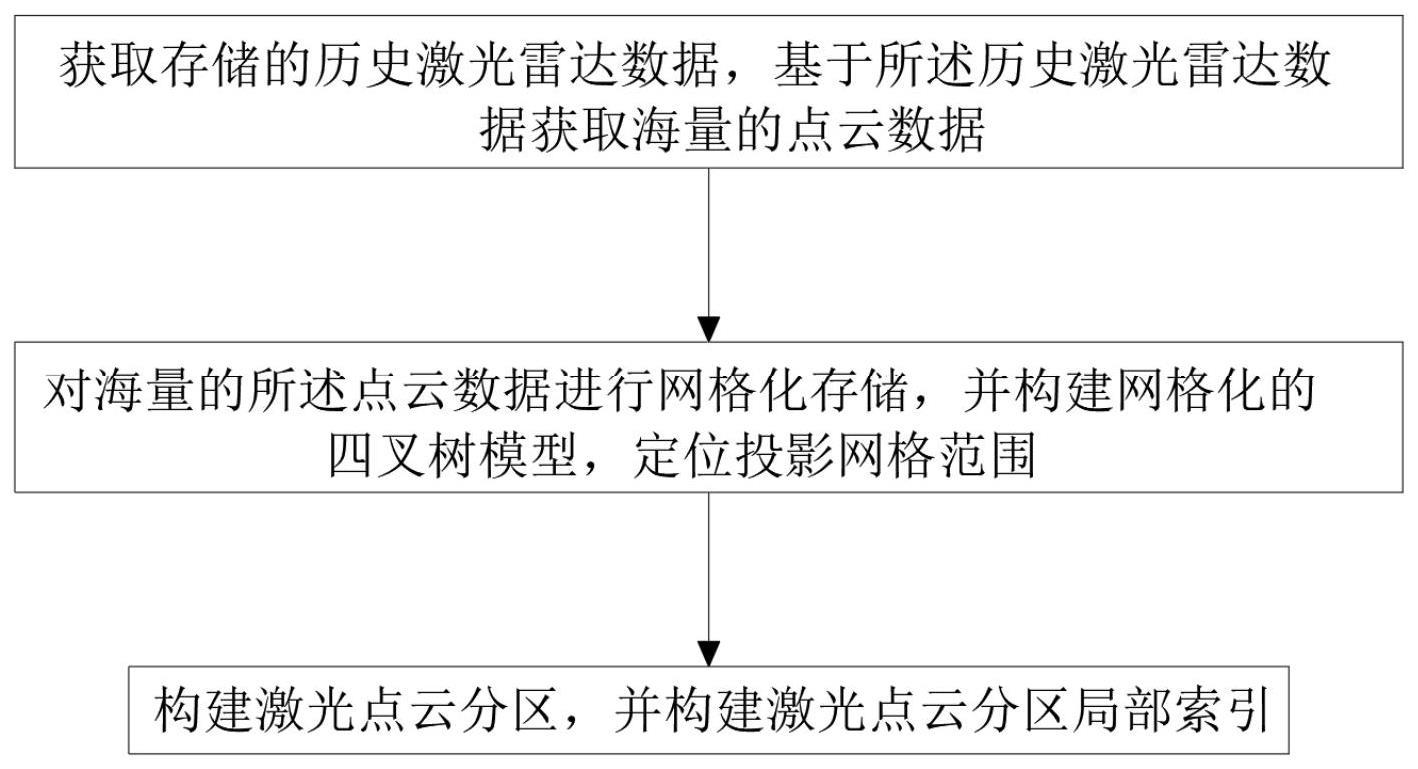
4、第一步:获取存储的历史激光雷达数据,基于所述历史激光雷达数据获取海量的点云数据;
5、第二步:对海量的所述点云数据进行网格化存储,并构建网格化的四叉树模型,定位投影网格范围;
6、第三步:构建激光点云分区,并构建激光点云分区局部索引。
7、进一步的,在所述第二步中,所述点云数据进行网格化的操作是首先统计点云数据的x、y、z坐标值的最大值与最小值,根据划分的格网大小l确定格网的行号、列号、层号,对于每个点p(x,y,z),依据其x、y、z坐标将该点划入到相应的格网。
8、进一步的,根据激光点云密度和单条点云数据占用的存储空间大小,确定网格大小,根据激光点云覆盖范围和网格大小l,计算各所述激光点云分区的覆盖范围,实现对应激光点云分区的快速划分。
9、进一步的,在定位投影网格范围时,需将扫描点云投影到xy的网格平面中,通过统计网格平面中的极差,判断网格中的点是否为剔除物点。
10、进一步的,在网格化存储之前,通过筛选算法对获取的海量的点云数据进行筛选,得到可用于网格化存储的合格点云数据。
11、与现有技术相比,本发明具有的优点和积极效果如下:开展海量点云数据高效存储、读取研究,探索如何利用激光点云技术对输电线路走廊进行快速调查流程与方法,实现与电力行业业务系统、专业应用间的无缝集成,进一步利用高精度数据。
12、进一步的,在所述第三步中,在四叉树模型的节点内嵌套网格标识,基于四叉树构建激光点云分区局部索引。
13、进一步的,采用四叉树对激光点云分区中的激光点进行二维剖分,对二维剖分得到的四叉树网格进行一维排序,然后对排序后的四叉树网格构建r树,完成激光点云分区的局部索引构建,并将激光点云分区的激光点数据和局部索引序列进行保存;其中r树是用于以有效方式存储空间数据索引的树数据结构,r树由单个根、内部节点和叶节点组成,根包含指向空间域中最大区域的指针;父节点包含指向其子节点的指针,其中子节点的区域与父节点的区域完全重叠;叶节点包含有关当前对象的最小外接矩形数据,r树常用作高维空间数据的索引结构,用以加快空间数据的查询。
14、本发明还提供一种基于点云数据网格化空间存储与索引装置,可执行基于点云数据网格化空间存储与索引方法。
15、本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,计算机程序被处理器运行时以执行基于点云数据网格化空间存储与索引方法。
技术特征:
1.一种基于点云数据网格化空间存储与索引方法,其特征在于:包括以下步骤;
2.根据权利要求1所述的一种基于点云数据网格化空间存储与索引方法,其特征在于:在所述第二步中,所述点云数据进行网格化的操作是首先统计点云数据的x、y、z坐标值的最大值与最小值,根据划分的格网大小l确定格网的行号、列号、层号,对于每个点p(x,y,z),依据其x、y、z坐标将该点划入到相应的格网。
3.根据权利要求2所述的一种基于点云数据网格化空间存储与索引方法,其特征在于:根据激光点云密度和单条点云数据占用的存储空间大小,确定网格大小l,根据激光点云覆盖范围和网格大小,计算各所述激光点云分区的覆盖范围,实现对应激光点云分区的快速划分。
4.根据权利要求1所述的一种基于点云数据网格化空间存储与索引方法,其特征在于:在定位投影网格范围时,需将扫描点云投影到xy的网格平面中,通过统计网格平面中的极差,判断网格中的点是否为剔除物点。
5.根据权利要求1所述的一种基于点云数据网格化空间存储与索引方法,其特征在于:在网格化存储之前,通过筛选算法对获取的海量的点云数据进行筛选,得到可用于网格化存储的合格点云数据。
6.根据权利要求1所述的一种基于点云数据网格化空间存储与索引方法,其特征在于:在所述第三步中,在四叉树模型的节点内嵌套网格标识,基于四叉树构建激光点云分区局部索引。
7.根据权利要求6所述的一种基于点云数据网格化空间存储与索引方法,其特征在于:采用四叉树对激光点云分区中的激光点进行二维剖分,对二维剖分得到的四叉树网格进行一维排序,然后对排序后的四叉树网格构建r树,完成激光点云分区的局部索引构建,并将激光点云分区的激光点数据和局部索引序列进行保存;其中r树是用于以有效方式存储空间数据索引的树数据结构,r树由单个根、内部节点和叶节点组成,根包含指向空间域中最大区域的指针;父节点包含指向其子节点的指针,其中子节点的区域与父节点的区域完全重叠;叶节点包含有关当前对象的最小外接矩形数据,r树常用作高维空间数据的索引结构,用以加快空间数据的查询。
8.一种基于点云数据网格化空间存储与索引装置,其特征在于:可执行权利要求1-7任一项所述的方法。
9.一种计算机可读存储介质,其特征在于:所述计算机可读存储介质上存储有计算机程序,计算机程序被处理器运行时以执行权利要求1-7中任一项所述的方法。
技术总结
本发明公开了一种基于点云数据网格化空间存储与索引方法、装置及计算机可读存储介质,涉及数据处理的技术领域,该方法包括以下步骤:第一步:获取存储的历史激光雷达数据,基于所述历史激光雷达数据获取海量的点云数据;第二步:对海量所述点云数据进行网格化存储,并构建网格化的四叉树模型,定位投影网格范围;第三步:构建激光点云分区,并构建激光点云分区局部索引。通过本发明的方法,可进行海量点云数据高效存储和读取,利用激光点云技术对输电线路走廊进行快速调查流程,实现与电力行业业务系统、专业应用间的无缝集成。
技术研发人员:徐鑫乾,李海涛,吴雪,李成,陆建锋,尹华,王红星,张星炜,陈玉权,张欣
受保护的技术使用者:国网江苏省电力有限公司淮安供电分公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!