一种机器人尺度参数与拓扑结构一体化的设计方法
本发明属于机器人机构性能设计,具体涉及一种机器人尺度参数与拓扑结构一体化的设计方法。
背景技术:
1、性能设计是机器人自主研发和工程应用的关键环节,需根据机器人应用环境对机器人各部件进行结构与尺度设计,是一种多目标、多参数、多约束的非线性优化问题。
2、虽然目前已有权重系数法、约束转换法与pareto前沿法等多目标优化设计方法可资利用,但它们仅对机器人的尺度参数进行设计,考虑机器人部件拓扑结构优化的现有方法主要侧重于参数化设计后的轻量化设计,而个别同时进行尺度参数与拓扑结构设计的方法仅对机器人部件单一拓扑结构下的尺度参数实施优化,并未真正揭示尺度参数与拓扑结构间作用规律,势必造成机器人性能无法达到理论最优;
3、同时,拓扑结构通常采用人工方式进行修整以满足制造工艺性,处理结果取决于设计者的经验。
4、因此,如何开展机器人尺度参数与拓扑结构同步优化的性能设计以及标准化制造工艺性处理仍是有待解决的问题。
技术实现思路
1、本发明为解决现有技术存在的问题而提出,其目的是提供一种机器人尺度参数与拓扑结构一体化的设计方法。
2、本发明的技术方案是:一种机器人尺度参数与拓扑结构一体化的设计方法,包括以下步骤:
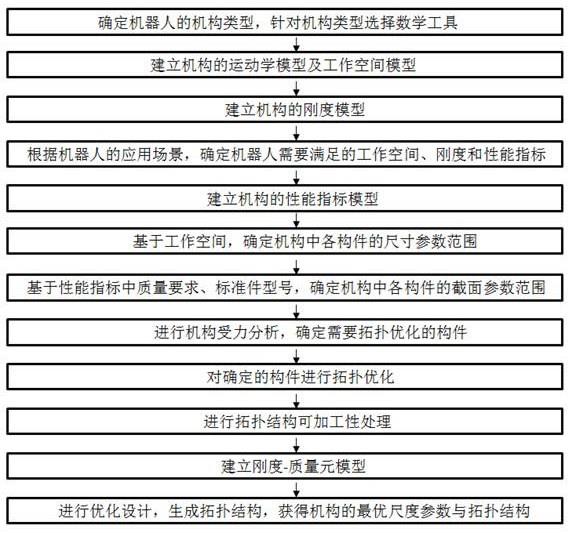
3、a.确定机器人的机构类型,针对机构类型选择数学工具;
4、b.建立机构的运动学模型及工作空间模型;
5、c.建立机构的刚度模型;
6、d.根据机器人的应用场景,确定机器人需要满足的工作空间、刚度和性能指标;
7、e.建立机构的性能指标模型;
8、f.基于工作空间,确定机构中各构件的尺寸参数范围;
9、g.基于性能指标中质量要求、标准件型号,确定机构中各构件的截面参数范围;
10、h.进行机构受力分析,确定需要拓扑优化的构件;
11、i.对确定的构件进行拓扑优化;
12、j.进行拓扑结构可加工性处理;
13、k.建立刚度-质量元模型;
14、l.进行优化设计,生成拓扑结构,获得机构的最优尺度参数与拓扑结构。
15、更进一步的,步骤a确定机器人的机构类型,针对机构类型选择数学工具,具体过程如下:
16、首先,判断机构中是否有闭环支链;
17、然后,判断机构中是否有串联结构;
18、再后,确定机构为串联机构、并联机构还是混联机构;
19、最后,根据机构类型选择对应的数学工具。
20、更进一步的,步骤b建立机构的运动学模型及工作空间模型,具体过程如下:
21、首先,基于得到的机构类型和选择的数学工具,求解机构的运动学正逆解;
22、然后,根据得到的正逆解,建立并得到机构的工作空间约束。
23、更进一步的,步骤c建立机构的刚度模型,具体过程如下:
24、首先,基于步骤b得到运动学模型,建立机构的力旋量空间与运动旋量空间;
25、然后,在依据机构的串并混联特点,得到机构各模块的刚度连接关系。
26、更进一步的,步骤d根据机器人的应用场景,确定机器人需要满足的工作空间、刚度和性能指标,具体过程如下:
27、首先,确定机器人的应用场景,得到应用场景需求;
28、然后,根据具体应用场景需求,确定机构末端的工作空间、刚度需求及性能指标。
29、更进一步的,步骤i对确定的构件进行拓扑优化,具体过程如下:
30、首先,利用正交实验法对尺度参数进行组合;
31、然后,根据组合结果,得到不同组合情况下的不同规格构件;
32、然后,利用有限元软件对待优化构件进行拓扑优化。
33、更进一步的,步骤j进行拓扑结构可加工性处理,具体过程如下:
34、首先,建立一种使拓扑结构满足制造工艺性的标准化处理算法;
35、然后,采用基于边缘检测的可加工性处理算法标准化地确定符合制造工艺性的拓扑结构。
36、更进一步的,步骤k建立刚度-质量元模型,具体过程如下:
37、首先,借助fea软件提取各构件的刚度;
38、然后,利用rsm构建各构件尺度参数与其刚度、质量的映射;
39、最后,形成拓扑优化构件的刚度-质量元模型。
40、更进一步的,步骤l进行优化设计,生成拓扑结构,获得机构的最优尺度参数与拓扑结构,具体过程如下:
41、首先,将得到的所有构件刚度-质量元模型嵌入机器人整机刚度模型与质量模型中;
42、然后,以确定的优化目标,采用优化算法进行求解得到pareto前沿;
43、最后,根据合作均衡点准则从pareto前沿中选取最优结果,从而获得机构的最优尺度参数与拓扑结构。
44、更进一步的,所述确定的优化目标,具体目标如下:
45、以刚度最大为目标、以质量最小为目标、以步骤d确定的性能指标为优化目标。
46、本发明的有益效果如下:
47、本方法建立了机构拓扑结构、尺度和性能的代数联系,综合了考虑拓扑结构和尺度对性能的耦合影响规律,解决了拓扑结构设计和尺度设计相互割裂的问题,具有卓越的优化能力。
技术特征:
1.一种机器人尺度参数与拓扑结构一体化的设计方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种机器人尺度参数与拓扑结构一体化的设计方法,其特征在于:步骤a确定机器人的机构类型,针对机构类型选择数学工具,具体过程如下:
3.根据权利要求1所述的一种机器人尺度参数与拓扑结构一体化的设计方法,其特征在于:步骤b建立机构的运动学模型及工作空间模型,具体过程如下:
4.根据权利要求1所述的一种机器人尺度参数与拓扑结构一体化的设计方法,其特征在于:步骤c建立机构的刚度模型,具体过程如下:
5.根据权利要求1所述的一种机器人尺度参数与拓扑结构一体化的设计方法,其特征在于:步骤d根据机器人的应用场景,确定机器人需要满足的工作空间、刚度和性能指标,具体过程如下:
6.根据权利要求1所述的一种机器人尺度参数与拓扑结构一体化的设计方法,其特征在于:步骤i对确定的构件进行拓扑优化,具体过程如下:
7.根据权利要求1所述的一种机器人尺度参数与拓扑结构一体化的设计方法,其特征在于:步骤j进行拓扑结构可加工性处理,具体过程如下:
8.根据权利要求1所述的一种机器人尺度参数与拓扑结构一体化的设计方法,其特征在于:步骤k建立刚度-质量元模型,具体过程如下:
9.根据权利要求1所述的一种机器人尺度参数与拓扑结构一体化的设计方法,其特征在于:步骤l进行优化设计,生成拓扑结构,获得机构的最优尺度参数与拓扑结构,具体过程如下:
10.根据权利要求9所述的一种机器人尺度参数与拓扑结构一体化的设计方法,其特征在于:所述确定的优化目标,具体目标如下:
技术总结
本发明公开了一种机器人尺度参数与拓扑结构一体化的设计方法,包括以下步骤:确定机器人的机构类型,选择数学工具;建立机构的运动学模型及工作空间模型;建立机构的刚度模型;确定机器人需要满足的工作空间、刚度和性能指标;建立机构的性能指标模型;基于工作空间,确定机构中各构件的尺寸参数范围;基于性能指标中质量要求、标准件型号,确定机构中各构件的截面参数范围;进行机构受力分析,确定需要拓扑优化的构件;对确定的构件进行拓扑优化;进行拓扑结构可加工性处理;建立刚度‑质量元模型;进行优化设计,生成拓扑结构,获得机构的最优尺度参数与拓扑结构。本方法解决了拓扑结构设计和尺度设计相互割裂的问题,具有卓越的优化能力。
技术研发人员:沈江,王喆,王猛,陈凯旋,王攀峰
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!