一种基于相位偏折术的3D相机虚拟环境平台仿真方法与流程
本发明主要涉及到图像视觉仿真,特指一种基于相位偏折术的3d相机虚拟环境平台仿真方法。
背景技术:
1、由于镜面物体表面的高反射性,针对镜面物体的测量、检测方法均落后于漫反射物体,目前国内镜面物体表面缺陷检测大多采用人工目视的方法,缺陷识别率低,检测时间长,限制了自动化生产节拍,故而使用一种基于相位偏折的镜面缺陷检测方法,该方法通过显示屏显示条纹图像,相机采集经待测镜面反射的显示屏虚像。由于待测镜面表面形变会引起反射条纹形变,通过检测条纹形变即可实现镜面缺陷检测,且该方法结构简单、速度快、成本低,但是实际应用场景中关于相机和屏幕之间的夹角,相机之间放置的角度导致公共视场的不同,最终都会导致检测区域的改变,从而影响检测效果,而虚拟仿真技术通过在仿真软件上操作相机以及屏幕,可以极大缩短实验前准备时间,并且仿真环境中可视化的公共视场可以为调试工作省去繁琐的调试步骤。
2、然而,目前没有相关相机调试仿真软件,只有单一模型的虚拟系统或者数字孪生系统,大部分都是控制某一单元进行操作,并且模型只作为场景的物体显示,无法根据仿真系统中的场景显示和物体结构来操作实际场景中的调试设备。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的问题,本发明提供一种操作简便、适用范围广、调试方便的基于相位偏折术的3d相机虚拟环境平台仿真方法。
2、为解决上述技术问题,本发明采用以下技术方案:
3、一种基于相位偏折术的3d相机虚拟环境平台仿真方法,其包括:
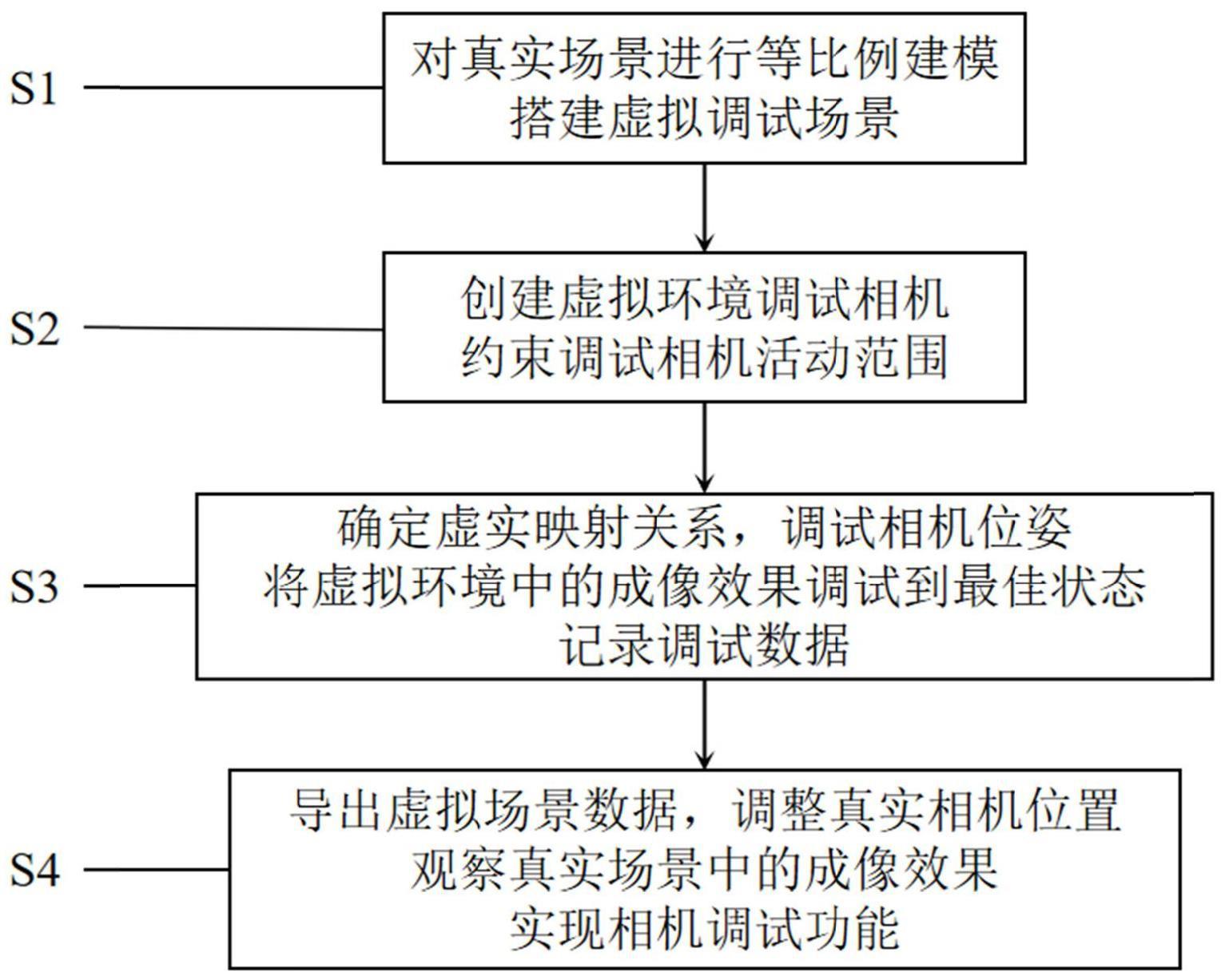
4、步骤s1:根据真实场景的物理信息,利用三维建模软件对真实场景进行等比例建模,在虚拟环境中搭建虚拟调试场景;
5、步骤s2:根据真实场景的相机参数、镜头参数创建虚拟环境的调试相机,根据真实场景结构约束确定调试相机的活动范围;
6、步骤s3:确定所有相机的虚实映射关系,在虚拟环境中调试相机位姿,将虚拟环境中的成像效果调试到最佳状态,并记录调试数据;
7、步骤s4:导出虚拟环境数据,根据映射关系在真实场景中还原虚拟场景中的相机布局数据,并观察真实场景中的成像效果,实现相机调试功能。
8、作为本发明方法的进一步改进:所述步骤s1中,利用cad工具或者三维扫描仪构建对象的三维模型,将三维模型生成文件转成fbx格式导入到unity3d,比例按照1:1比例大小;所述数字模型创建包括机械臂模型和相机pmd系统模型。
9、作为本发明方法的进一步改进:所述步骤s1中,所述真实场景的物理信息包括实际相机中的中心点和实际场景中的物体相关尺寸信息,所述相关尺寸信息包括长度、宽度、高度和半径信息。
10、作为本发明方法的进一步改进:所述步骤s2中,利用真实场景信息创建调试相机,包括:根据真实场景中的相机中心点确定调试相机的中心点,然后根据所述真实场景结构约束确定调试相机的活动范围。
11、作为本发明方法的进一步改进:所述步骤s3中,建立虚拟相机之后,将所创建的调试相机进行编号,确定调试相机与真实相机的虚实映射关系,根据需求调试每个相机位姿将虚拟环境中的成像效果调试到最佳状态,并记录调试数据。
12、作为本发明方法的进一步改进:在所述步骤s3中,建立调试相机的记录模块,所述记录模块记录的内容包含调试相机编号、调试相机位姿信息和活动范围,以及虚拟相机中所对应的仿真虚拟相机信息。
13、作为本发明方法的进一步改进:在所述步骤s3中,建立调试相机的人机交互显示模块,用于通过输入编号选定相应相机并将相机视角切换至与该编号对应调试相机视角,操作显示多对应的虚拟场景下的虚拟相机,其中切换位置后的相机活动范围是输入编号对应的调试相机的活动范围。
14、作为本发明方法的进一步改进:建立的人机交互显示模块包括仿真系统中虚拟相机的移动显示单元,用于通过3d引擎实时获取所操作鼠标四个方向上的移动轴值,然后根据移动轴值实时确定相机的偏移量以操控虚拟相机移动。
15、作为本发明方法的进一步改进:在建立的人机交互显示模块的相机中还包括相机缩放显示单元,用于根据所操作鼠标中间滚轮的变化值大小控制相机远近程度。
16、作为本发明方法的进一步改进:根据需求确定相机编号及对应视场,所述需求指验证真实场景中相机视场时,根据要确定的相机视场选择对应仿真环境中相机编号放置虚拟机械臂中进行调试,确定虚拟相机的中心点和虚拟相机的相关尺寸信息;所述相关尺寸信息包括长度、宽度、高度和/或半径信息;根据仿真环境相机的中心点确定调试相机的中心点,然后根据所述相关尺寸信息及调试相机的中心点确定调试相机的活动边界。
17、作为本发明方法的进一步改进:操作鼠标移动轴确定机械臂和相机pmd系统模型的观察角度,并通过鼠标四个方向上的移动轴值;然后根据移动轴值实时确定相机的偏移量以操控相机移动,通过观察仿真软件中的虚拟相机可以观察到不同角度下的相机视场。
18、作为本发明方法的进一步改进:将两个或四个相机置于仿真屏幕上方,根据仿真系统处理后呈现出仿真屏幕根据镜面反射原理,仿真模拟系统中的ccd相机与仿真屏幕之间设置有一定的夹角,以保证仿真ccd相机捕获到由屏幕发出的反射光线。
19、作为本发明方法的进一步改进:在调整仿真ccd相机与屏幕之间角度时,使相机的主光线交于屏幕中心;虚拟相机放置角度用来保证两个相机或者两两相机的公共视场大。
20、与现有技术相比,本发明的优点就在于:
21、本发明的基于相位偏折术的3d相机虚拟环境平台仿真方法,操作简便、适用范围广、调试方便,利用本发明的仿真方法速度快、成本低,尤其是对于相机和屏幕之间的位姿调整,非常简便,能够保证较大的公共视场,最终保证检测区域的稳定性,从而提高检测效果、检测精度。
技术特征:
1.一种基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,包括:
2.根据权利要求1所述的基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,所述步骤s1中,利用cad工具或者三维扫描仪构建对象的三维模型,将三维模型生成文件转成fbx格式导入到unity3d,比例按照1:1比例大小;所述数字模型创建包括机械臂模型和相机pmd系统模型。
3.根据权利要求2所述的基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,所述步骤s1中,所述真实场景的物理信息包括实际相机中的中心点和实际场景中的物体相关尺寸信息,所述相关尺寸信息包括长度、宽度、高度和半径信息。
4.根据权利要求3所述的基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,所述步骤s2中,利用真实场景信息创建调试相机,包括:根据真实场景中的相机中心点确定调试相机的中心点,然后根据所述真实场景结构约束确定调试相机的活动范围。
5.根据权利要求1-4中任意一项所述的基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,所述步骤s3中,建立虚拟相机之后,将所创建的调试相机进行编号,确定调试相机与真实相机的虚实映射关系,根据需求调试每个相机位姿将虚拟环境中的成像效果调试到最佳状态,并记录调试数据。
6.根据权利要求5所述的基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,在所述步骤s3中,建立调试相机的记录模块,所述记录模块记录的内容包含调试相机编号、调试相机位置信息和活动范围,以及虚拟相机中所对应的仿真虚拟相机信息。
7.根据权利要求5所述的基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,在所述步骤s3中,建立调试相机的人机交互显示模块,用于通过输入编号选定相应相机并将相机视角切换至与该编号对应调试相机视角,操作显示多对应的虚拟场景下的虚拟相机,其中切换位置后的相机活动范围是输入编号对应的调试相机的活动范围。
8.根据权利要求7所述的基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,建立的人机交互显示模块包括仿真系统中虚拟相机的移动显示单元,用于通过3d引擎实时获取所操作鼠标四个方向上的移动轴值,然后根据移动轴值实时确定相机的偏移量以操控虚拟相机移动。
9.根据权利要求7所述的基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,在建立的人机交互显示模块的相机中还包括相机缩放显示单元,用于根据所操作鼠标中间滚轮的变化值大小控制相机远近程度。
10.根据权利要求1-4中任意一项所述的基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,根据需求确定相机编号及对应视场,所述需求指验证真实场景中相机视场时,根据要确定的相机视场选择对应仿真环境中相机编号放置虚拟机械臂中进行调试,确定虚拟相机的中心点和虚拟相机的相关尺寸信息;所述相关尺寸信息包括长度、宽度、高度和/或半径信息;根据仿真环境相机的中心点确定调试相机的中心点,然后根据所述相关尺寸信息及调试相机的中心点确定调试相机的活动边界。
11.根据权利要求7所述的基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,操作鼠标移动轴确定机械臂和相机pmd系统模型的观察角度,并通过鼠标四个方向上的移动轴值;然后根据移动轴值实时确定相机的偏移量以操控相机移动,通过观察仿真软件中的虚拟相机可以观察到不同角度下的相机视场。
12.根据权利要求7所述的基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,将两个或四个相机置于仿真屏幕上方,根据仿真系统处理后呈现出仿真屏幕根据镜面反射原理,仿真模拟系统中的ccd相机与仿真屏幕之间设置有一定的夹角,以保证仿真ccd相机捕获到由屏幕发出的反射光线。
13.根据权利要求12所述的基于相位偏折术的3d相机虚拟环境平台仿真方法,其特征在于,在调整仿真ccd相机与屏幕之间角度时,使相机的主光线交于屏幕中心;虚拟相机放置角度用来保证两个相机或者两两相机的公共视场大。
技术总结
本发明公开了一种基于相位偏折术的3D相机虚拟环境平台仿真方法,其包括:步骤S1:根据真实场景的物理信息,利用三维建模软件对真实场景进行等比例建模,在虚拟环境中搭建虚拟调试场景。步骤S2:根据真实场景的相机参数、镜头参数等创建虚拟环境的调试相机,根据真实场景结构约束确定调试相机的活动范围。步骤S3:确定所有相机的虚实映射关系,在虚拟环境中调试相机位姿,将虚拟环境中的成像效果调试到最佳状态,并记录调试数据。步骤S4:导出虚拟环境数据,根据映射关系在真实场景中还原虚拟场景中的相机布局数据,并观察真实场景中的成像效果,实现相机调试功能。本发明具有操作简便、适用范围广、调试方便等优点。
技术研发人员:葛俊辉,杨东,李煌,汪流红
受保护的技术使用者:湖南视比特机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!