一种面向光滑物体面型重建的偏折成像方法与流程
本发明主要涉及到基于视觉的智能化质量检测,特指一种面向光滑物体面型重建的偏折成像方法。
背景技术:
1、目前在工业生产制造领域,一般需要对目标对象(产品)进行质量缺陷检测,在这其中非常具有技术难度的就是针对光滑表面的目标对象的缺陷检测,例如如汽车漆面、玻璃、陶瓷等。
2、这类光滑表面的目标对象的表面形貌直接反映了其制造质量,为了把控质量就需要对面型进行重构。常用的接触式测量方式(如三坐标机),易损伤表面,且检测效率低。现有技术中的主流非接触式测量方法(如条纹投影轮廓术),一般是针对漫反射表面,但是在测量光滑表面时,极易造成图像过曝,从而难以完成高质量面型重建。
3、有从业者提出利用偏折术,以漫反射面光源替代条纹投影轮廓术中的数字投影仪,试图克服图像过曝问题,使其更适用于光滑物体面型重构。但由于系统构建的特殊性,相机与面光源并无直接视场,即相机不能直接拍摄到面光源;此外由于物体的镜面反射特性,其表面的高度和法向共同影响反射光线的方向,因此在深度值解算过程中会造成深度-梯度歧义等问题。同时,目前更多的研究倾向于单目偏折术,这种方式需借助辅助设备完成物体基准点定位,所以较难应用于工业检测。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种原理简单、适用范围广、能够提高检测精度的面向光滑物体面型重建的偏折成像方法
2、为解决上述技术问题,本发明采用以下技术方案:
3、一种面向光滑物体面型重建的偏折成像方法,其包括:
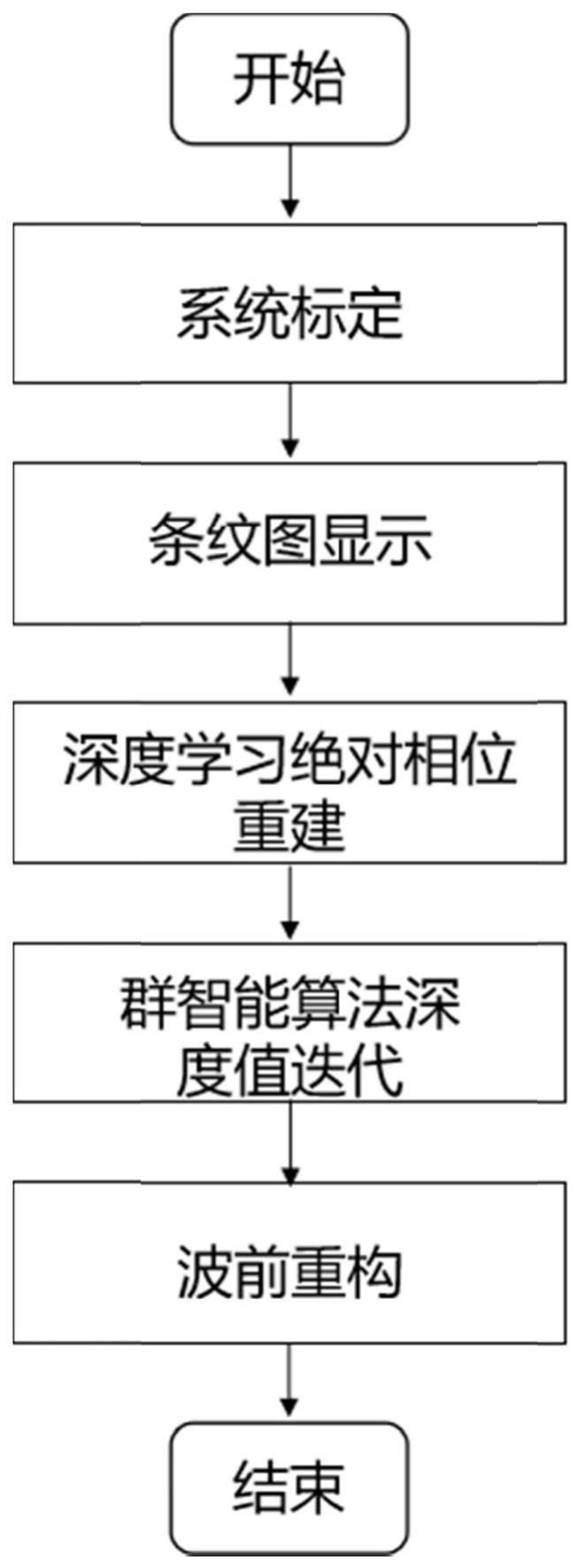
4、步骤s1:数据标定;在数据采集之前,进行系统位姿标定;
5、步骤s2:条纹图显示,采集图像;通过平面镜使相机采集平面镜反射的屏幕虚像;
6、步骤s3:深度学习,绝对相位重建;
7、步骤s4:群智能算法深度值迭代;
8、步骤s5:波前重构;
9、步骤s6:输出图像,结束。
10、作为本发明方法的进一步改进:所述步骤s2,在采集过程中,使用条纹图案作为调制显示在漫反射面光源,图案的生成公式为:
11、
12、其中,(x,y)为漫反射面光源的坐标,n代表相移索引,in(x,y)表示生成图像在坐标(x,y)处的光强值,a和b为常数一般取a=128,b=127,p为光源在横向或纵向的分辨率值,n表示相移步数,且n≥3。
13、作为本发明方法的进一步改进:所述步骤s2中相机端实际采集的图案为:
14、
15、其中,(u,v)表示相机像素,n代表相移索引,in(u,v)表示相机在(u,v)像素坐标处采集的光强值,o为环境光,ω为物体表面某点反射到像素坐标(u,v)上的光源的区域,a和b为常数一般取a=128,b=127,βi表示物体表某点面的反射系数,p为光源在横向或纵向的分辨率值,xi为ω区域中的坐标,n表示相移步数,且n≥3。
16、作为本发明方法的进一步改进:所述步骤s3中,结合深度神经网络以多幅相移条纹为输入,直接获取相位图。
17、作为本发明方法的进一步改进:所述深度神经网络的构建采用包裹相位图生成网络的构建方式,深度学习方法采用encode-decode特征提取与解码网络构造,特征提取模块命名feature_block,特征解码模块decode特征解析模块命名concatblock;卷积层convlayer(in,out,kenel×kenel)、采样层maxpooling(in,out,kenel×kenel,stride),其中kenel表示核的大小,stride表示步长。
18、作为本发明方法的进一步改进:通过所述深度神经网络推理得到结果,得到{p1,p2,p3}三幅包裹相位,通过多频外插获取绝对相位值,得到相机像素与光源之间像素匹配关系。
19、作为本发明方法的进一步改进:利用漫反射面光源对待测物体进行照射,利用第一相机和第二相机进行取像;取第一相机一点像素c1,设c1点入射光线对应的向量为i1,根据相机内参计算得到该向量在第一相机坐标系下的实际值;假设物体点位于p1处,根据系统外参将p1点投影到第二相机的c2处。根据相机像素与光源之间像素匹配关系,得到点s1和s2,根据镜面反射原理可以计算出s1和c1之间的法向n1,s2和c2之间的法向n2;如果n1和n2相等,那么p1点为物体表面实际位置;如果不相等,重新假设物体点位置,重复上述步骤反复迭代,直到n1和n2之间的差距在误差范围内,即能得到物体的实际空间位置点及当前法向。
20、作为本发明方法的进一步改进:所述步骤s4中还包括对群智能算法进行加速,所述加速的过程包括:
21、首先沿相机光线取不同位置的物体点作为算法种子点,设第i个粒子点的位置为xid,该粒子矢量速度为vid,最优位置为pid,全局最优位置为pbest,那么该粒子在下一次迭代矢量速度为:
22、vi(d+1)=wvid+c1r1(pid-xid)+c2r2(pbest-xid)
23、其中,w为惯性分量,c1为个体学习因子,c2为群体学习因子,r1和r2为随机因子;
24、物体位置更新式为:
25、xi(d+1)=xid+vi(d+1)
26、其中,xi(d+1)为更新后的粒子位置。
27、作为本发明方法的进一步改进:所述步骤s1的过程包括:
28、步骤s101:将标定图案显示在光源上,调整平面镜位姿,使相机能够完整采集到镜面反射的标定图案虚像;
29、步骤s102:通过多次移动平面镜获取约束,借助张氏标定法和光学几何关系,同时完成相机内参和系统外参标定。
30、作为本发明方法的进一步改进:所述重建过程采用的群智能算法为蚁群算法、遗传算法、粒子群算法、群狼搜索算法中的一个或多个的融合。
31、与现有技术相比,本发明的优点就在于:
32、1、本发明的面向光滑物体面型重建的偏折成像方法,原理简单、适用范围广、能够提高检测的精度,基于现有偏折术重建的难点,以偏折成像为基础,实现了光滑表面物体面型重构,能够被广泛应用于工业生产环境的光滑表面物体面型重构。
33、2、本发明的面向光滑物体面型重建的偏折成像方法,基于深度学习的解相算法,通过输入多幅条纹图直接获取绝对相位,可以解决某些漫反射较强的光滑表面的造成的相位噪声和相位误差,同时因只需向网络输入较少的图片,还可以提升系统的采集效率。在成像过程中,基于深度学习的解相算法,可以提高相位质量,能够大幅提升采集速度。
34、3、本发明的面向光滑物体面型重建的偏折成像方法,基于群智能算法的深度值迭代,可以克服原有全局搜索速度慢的问题,实现快速收敛,大大加快了迭代速度,提高检测效率。
技术特征:
1.一种面向光滑物体面型重建的偏折成像方法,其特征在于:包括:
2.根据权利要求1所述的面向光滑物体面型重建的偏折成像方法,其特征在于:所述步骤s2,在采集过程中,使用条纹图案作为调制显示在漫反射面光源,图案的生成公式为:
3.根据权利要求2所述的面向光滑物体面型重建的偏折成像方法,其特征在于:所述步骤s2中相机端实际采集的图案为:
4.根据权利要求1所述的面向光滑物体面型重建的偏折成像方法,其特征在于:所述步骤s3中,结合深度神经网络以多幅相移条纹为输入,直接获取相位图。
5.根据权利要求4所述的面向光滑物体面型重建的偏折成像方法,其特征在于:所述深度神经网络的构建采用包裹相位图生成网络的构建方式,深度学习方法采用encode-decode特征提取与解码网络构造,特征提取模块命名feature_block,特征解码模块decode特征解析模块命名concatblock;卷积层convlayer(in,out,kenel×kenel)、采样层maxpooling(in,out,kenel×kenel,stride),其中kenel表示核的大小,stride表示步长。
6.根据权利要求5所述的面向光滑物体面型重建的偏折成像方法,其特征在于:通过所述深度神经网络推理得到结果,得到{p1,p2,p3}三幅包裹相位,通过多频外插获取绝对相位值,得到相机像素与光源之间像素匹配关系。
7.根据权利要求5所述的面向光滑物体面型重建的偏折成像方法,其特征在于:利用漫反射面光源对待测物体进行照射,利用第一相机和第二相机进行取像;取第一相机一点像素c1,设c1点入射光线对应的向量为i1,根据相机内参计算得到该向量在第一相机坐标系下的实际值;假设物体点位于p1处,根据系统外参将p1点投影到第二相机的c2处。根据相机像素与光源之间像素匹配关系,得到点s1和s2,根据镜面反射原理可以计算出s1和c1之间的法向n1,s2和c2之间的法向n2;如果n1和n2相等,那么p1点为物体表面实际位置;如果不相等,重新假设物体点位置,重复上述步骤反复迭代,直到n1和n2之间的差距在误差范围内,即能得到物体的实际空间位置点。
8.根据权利要求1-7中任意一项所述的面向光滑物体面型重建的偏折成像方法,其特征在于:所述步骤s4中还包括对群智能算法进行加速,所述加速的过程包括:
9.根据权利要求1-7中任意一项所述的面向光滑物体面型重建的偏折成像方法,其特征在于:所述步骤s1的过程包括:
10.根据权利要求1-7中任意一项所述的面向光滑物体面型重建的偏折成像方法,其特征在于:所述重建过程采用的群智能算法为蚁群算法、遗传算法、粒子群算法、群狼搜索算法中的一个或多个的融合。
技术总结
本发明公开了一种面向光滑物体面型重建的偏折成像方法,其包括:步骤S1:数据标定;在数据采集之前,进行系统位姿标定;步骤S2:条纹图显示,采集图像;通过平面镜使相机采集平面镜反射的屏幕虚像;步骤S3:深度学习,绝对相位重建;步骤S4:群智能算法深度值迭代;步骤S5:波前重构;步骤S6:输出图像,结束。本发明具有原理简单、适用范围广、能够提高检测精度等优点。
技术研发人员:葛俊辉,邓俊杰,丁凡
受保护的技术使用者:湖南视比特机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!