一种基于贝叶斯估计的船舶模型参数在线辨识方法及系统
本发明属于船舶模型参数辨识邻域,具体涉及一种基于贝叶斯估计的船舶模型参数在线辨识方法及系统。
背景技术:
0、技术背景
1、船舶动力学模型广泛应用于船舶运动模拟仿真和船舶运动控制器设计,船舶模型参数辨识是获取船舶动力学模型参数的重要方法之一。模型参数辨识是指根据船舶运动控制系统的输入和相应响应信号数据,确定一个准确的数学模型,以描述船舶在特定操纵状态下的动力学特性。船舶模型参数辨识前通常需要开展z型实验和回转实验采集船舶运动数据用于辨识。根据参数辨识过程与数据采集是否同步进行,模型参数辨识又可分为在线辨识和离线辨识技术。在线辨识相比于离线辨识对算法的安全性和实时性均有更高的要求。
2、常用的模型参数辨识方法有:最小二乘法,极大似然估计,卡尔曼滤波方法,遗传算法法等,以及上述方法的改进算法。
3、文献号为cn113238488a的现有技术公开了一种船舶模型参数的获得方法及装置,所述方法包括:获取船舶的采集设备采集的传感器数据;根据所述传感器数据,得到第一时刻的数据文件和第二时刻的数据文件;所述数据文件包括:时间信息、传感器数据以及转向率加速度;根据所述第一时刻的数据文件和所述第二时刻的数据文件,得到第一过程船舶模型参数;根据所述第一过程船舶模型参数,得到第一船舶模型参数。其实现了船舶模型的在线迭代均值辨识,具有不依赖辨识初值和经验,计算量小且快的优点。这种方法没有根据条件数和相关性系数对数据自动进行加权,影响参数辨识精度。
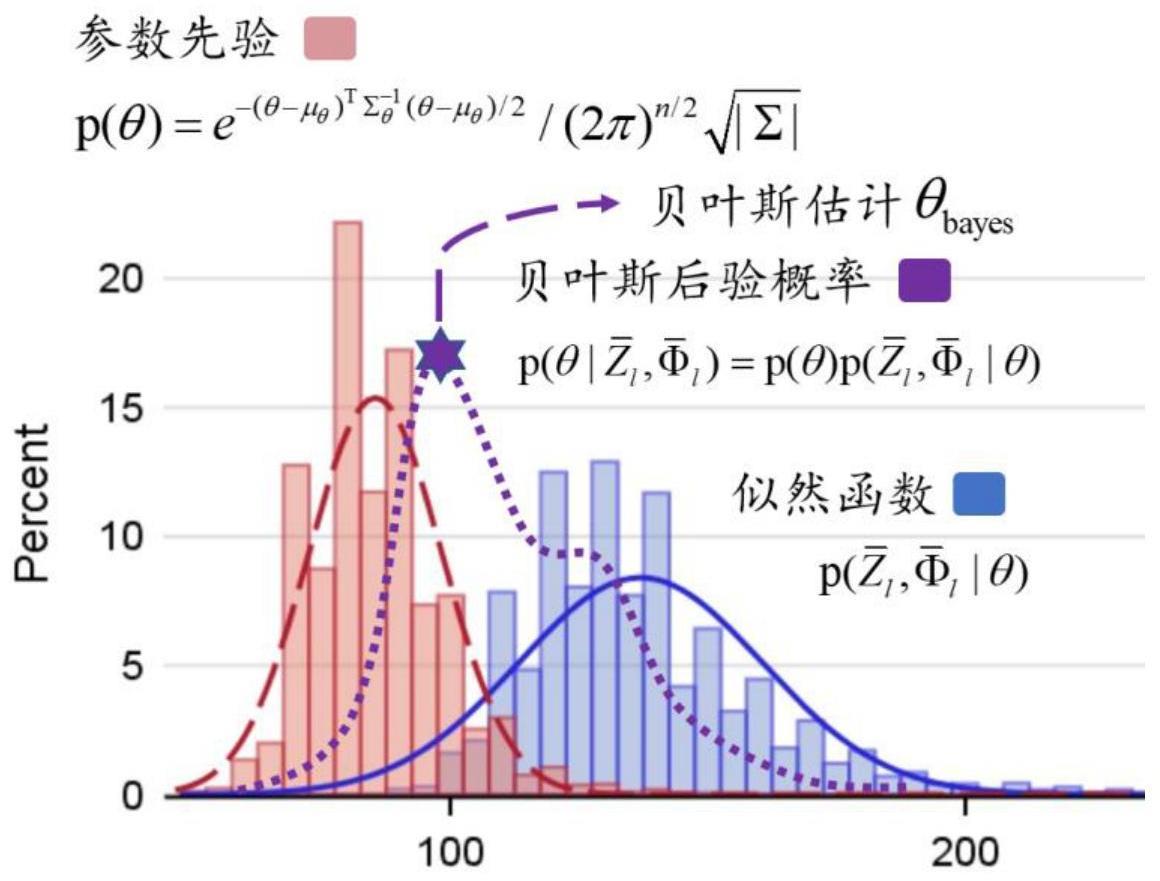
4、现有技术中针对船舶模型参数,没有人将贝叶斯估计理论应用于船舶模型参数在线辨识,通过似然函数和参数先验来求取后验概率,再通过后验概率最大原理求得贝叶斯估计结果,随后根据条件数和相关性系数对数据进行加权以提升参数辨识的精度。
技术实现思路
1、本发明要解决的技术问题是:
2、本发明的目的是供供一种基于贝叶斯估计的船舶模型参数在线辨识方法及系统,以建立船舶模型历史先验mmg-gmm模型、在线数据似然函数和gmm最大后验估计方法,用于船舶模型参数在线辨识,提升参数辨识的精度。
3、本发明为解决上述技术问题所采用的技术方案为:
4、一种基于贝叶斯估计的船舶模型参数在线辨识方法,包括如下步骤:
5、步骤一:根据已知的在线测量数据段,求取似然函数;
6、步骤二:根据贝叶斯最大后验定理,利用先验和似然函数求取后验概率,再使得后验概率取得其最大值,得到相应的贝叶斯估计结果;
7、步骤三:根据条件数和相关性系数对数据进行加权,得到加权后后验概率函数,根据上述步骤得到自动加权贝叶斯估计方法,基于自动加权贝叶斯估计在线辨识船舶模型参数
8、进一步地,步骤一的具体实现过程为:
9、求取模型似然函数
10、似然函数用于描述既定情景下已知船舶模型参数θ条件下,一组特定的船舶运动时间序列数据出现的概率,是已知的测量结果,似然函数的取值随θ变化而变化,模型似然函数的表达如下:
11、
12、式中,f函数为标准正态分布函数即从上述似然函数的形式可以看出,模型参数θ的运动预测误差越大,似然概率越小,为似然重要性指数。
13、进一步地,步骤二的具体实现过程为:
14、基于贝叶斯最大后验定理在线辨识船舶模型参数
15、已知船舶模型参数先验概率分布满足高斯混合模型如下:
16、
17、
18、
19、
20、
21、
22、其中,u为船舶航行速度,v为船舶横荡速度,r为船舶艏摇角速度,n为船舶在航行过程中主机转速,δ为输入舵角,bv,br,cv,cr,cδ均为船舶自身动力学模型参数值,ωu,ωv,ωr为船舶航行过程中遇到的噪声干扰,n(μ,σ2)表示均值为μ,方差为σ2的正态分布;
23、后验概率用于描述已知一组特定的船舶运动时间序列数据的条件下,船舶模型参数取值为θ的概率,根据贝叶斯定理,由步骤一得出的模型似然函数带入如下公式,后验概率可通过先验和似然函数求取
24、
25、取使得上述后验概率取得极大值时的θ和工况隐变量m为参数的贝叶斯估计结果
26、
27、上式中,p(θ,m)是已知的参数先验概率分布,即通过历史数据训练得到高斯混合模型在场景隐变量m处的高斯分量,p(θ,m)=p(m)p(θ|m)=pmn(θ|μm,σm),pm是场景隐变量m发生的概率。已知参数先验p(θ,m)和在线数据的条件下,最优化问题的解存在,且唯一,该解为:
28、
29、进一步地,步骤三中基于自动加权贝叶斯估计在线辨识船舶模型参数具体为:
30、根据条件数和相关性系数对数据进行加权,w为主成分加权权重矩阵和相关性加权权重矩阵得乘积,求得对应的加权后验概率函数:
31、
32、计算基于加权最大后验的船舶模型参数辨识结果θm*:
33、
34、进一步地,船舶模型参数θ表示如下:
35、θu=[au,an]t,θv=[bv,br]t,θr=[cv,cr,cδ]t
36、au,an,bv,br,cv,cr,cδ均为船舶自身动力学模型参数值,a、b、c对应的是船舶三个自由度a是前进方向,b是侧向,c是转向。
37、一种基于贝叶斯估计的船舶模型参数在线辨识系统,该系统具有与上述技术方案的步骤对应的程序模块,运行时执行上述的一种基于贝叶斯估计的船舶模型参数在线辨识方法中的步骤。
38、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序配置为由处理器调用时实现所述的一种基于贝叶斯估计的船舶模型参数在线辨识方法的步骤。
39、本发明具有以下有益技术效果:
40、本发明所述的一种基于贝叶斯估计的船舶模型参数在线辨识方法,提出船舶模型历史先验信息mmg-gmm模型和在线数据似然函数在线辨识船舶模型参数,可用于实船模型参数在线辨识。提升了船舶模型参数在线辨识的精度。本发明将贝叶斯估计理论应用于船舶模型参数在线辨识,通过似然函数和参数先验来求取后验概率,再通过后验概率最大原理求得贝叶斯估计结果,随后根据条件数和相关性系数对数据进行加权,提升参数辨识的精度,发明成果将应用到实船,为船舶运动控制器设计和优化提供参数依据。具体优点表现在以下几个方面:1、由于历史先验的辅助,辨识算法对在线数据特征的依赖性下降,用在线自由航行转向数据也能完成参数辨识;参数结果准确性高,获得的模型精度高。2、历史先验规定了参数范围,不仅使得辨识结果安全可靠,成功率高,同时加快了在线辨识的收敛速度,计算量小,可为船舶运动建模和参数辨识提供有效支持。3、根据条件数和相关性系数对数据自动进行加权,进一步提高参数辨识精度。
技术特征:
1.一种基于贝叶斯估计的船舶模型参数在线辨识方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于贝叶斯估计的船舶模型参数在线辨识方法,其特征在于,步骤一的具体实现过程为:
3.根据权利要求1或2所述的一种基于贝叶斯估计的船舶模型参数在线辨识方法,其特征在于,步骤二的具体实现过程为:
4.根据权利要求3所述的一种基于贝叶斯估计的船舶模型参数在线辨识方法,其特征在于,步骤三中基于自动加权贝叶斯估计在线辨识船舶模型参数具体为:
5.根据权利要求1所述的一种基于贝叶斯估计的船舶模型参数在线辨识方法,其特征在于,船舶模型参数θ表示如下:
6.一种基于贝叶斯估计的船舶模型参数在线辨识系统,其特征在于:该系统具有与上述权利要求1-5任一项权利要求的步骤对应的程序模块,运行时执行上述的一种基于贝叶斯估计的船舶模型参数在线辨识方法中的步骤。
7.一种计算机可读存储介质,其特征在于:所述计算机可读存储介质存储有计算机程序,所述计算机程序配置为由处理器调用时实现权利要求1-5中任一项所述的一种基于贝叶斯估计的船舶模型参数在线辨识方法的步骤。
技术总结
一种基于贝叶斯估计的船舶模型参数在线辨识方法及系统,属于船舶模型参数辨识邻域。为了提升船舶模型参数在线辨识的精度而提出的。技术要点:本发明将贝叶斯估计理论应用于船舶模型参数在线辨识,通过似然函数和参数先验来求取后验概率,再通过后验概率最大原理求得贝叶斯估计结果,随后根据条件数和相关性系数对数据进行加权,提升参数辨识的精度,发明成果将应用到实船,为船舶运动控制器设计和优化提供参数依据。根据已知的在线测量数据段,求取似然函数;(根据贝叶斯最大后验定理,利用先验和似然函数求取后验概率,再使得后验概率取得其最大值,得到相应的贝叶斯估计结果;根据条件数和相关性系数对数据进行加权,得到加权后后验概率函数,根据上述步骤得到自动加权贝叶斯估计方法。
技术研发人员:包政凯,白阳,彭晨,王昱瑶,刘志林
受保护的技术使用者:哈尔滨工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!