一种基于改进灰狼算法的摄影测量摄站布局规划方法与流程
本发明涉及摄影测量,具体地说,涉及一种基于改进灰狼算法的摄影测量摄站布局规划方法。
背景技术:
1、由于具有精度高、测量范围大、便携、可同时测量多个目标等优点,摄影测量技术被广泛应用在飞机部件的装配过程中。对大尺寸部件进行摄影测量时,测量精度受相机位置、姿态影响较大,摄站位姿布局会对测量系统的性能产生影响。在实际作业流程中,相机的位置和数量通常由操作人员凭经验把控,存在一定盲目性。待测部件体量大、结构复杂时、约束条件多,依赖人工经验不能保证测量精度的最优,或为了保证相片重叠度从而大大增加相片数量,形成严重的图像数据冗余。因此,研究摄站布站规划方法实现相机位姿组合求解,消除依赖人工经验布设相机的盲目性,对于提高测量精度和可靠性有着重大意义,面对多架次的同型号待测对象,实施一次规划即可高效地应对全部测量任务。
2、陈佳毅等(大型槽式聚光器面形摄影测量网络规划方法研究.可再生能源,2016(3):7.)设计一种基于遗传算法的摄影测量摄站布局规划方法,有效地提高了面形的测量精度,但使用遗传算法进行全局寻优,随机初始化种群可能存在数据不均匀问题,且算法并行性较差,全局搜索能力有待提高。
技术实现思路
1、本发明针对现有的智能优化算法中随机初始化种群存在数据不均匀或初始个体质量较差、搜索起点低的问题,提出一种基于改进灰狼算法的摄影测量摄站布局规划方法,首先建立摄影测量不确定度评价函数;然后根据k-means聚类算法生成初始摄影测量摄站布局位置;最后将摄影测量不确定度评价函数作为灰狼算法的目标优化函数,得到最优的摄影测量摄站布局,通过确定最优的摄站位置组合,实现更高精度的摄站布局规划,提高了测量效率。
2、本发明具体实现内容如下:
3、一种基于改进灰狼算法的摄影测量摄站布局规划方法,首先根据待测目标特征点的重构协方差矩阵对角线元素矩阵,确定所述待测目标特征点的重构不确定度,并根据所述重构不确定度建立摄影测量不确定度评价函数;然后根据k-means聚类算法生成初始摄影测量摄站布局位置;最后将所述摄影测量不确定度评价函数作为灰狼算法的目标优化函数,在传统灰狼算法基础上采用k-means聚类算法生成初始摄影测量站位,并作为初始种群的个体,改进了灰狼算法以适应摄影测量站位规划,能够更快搜索出最优站位布局。
4、为了更好地实现本发明,进一步地,所述基于改进灰狼算法的摄影测量摄站布局规划方法具体包括以下步骤:
5、步骤1:根据待测目标特征点的坐标信息,建立共线方程组,计算所述待测目标特征点的重构协方差矩阵对线元素的最大值,并将所述最大值作为所述待测目标特征点的重构不确定度;
6、步骤2:将所述待测特征目标点的重构不确定度的平均值作为当前摄影测量摄站布局位置的空间重构不确定度,建立测量不确定度评价函数;
7、步骤3:根据k-means聚类算法将特征点进行分类,分别计算所述特征点至聚类中心的距离,向最短的所述距离对应的聚类中心的法向方向偏置设定距离,计算初始摄影测量摄站布局位置;
8、步骤4:将所述不确定评价函数作为灰狼算法的目标优化函数,计算目标函数值,将所述目标函数值最大的目标位置作为最优的摄影测量摄站位置。
9、为了更好地实现本发明,进一步地,所述步骤3的具体包括以下步骤:
10、步骤31:确定聚类个数k,在特征点集中随机选取k个特征点作为初始聚类中心;
11、步骤32:将所述特征点聚类分组,分别计算所述特征点到k个聚类中心的距离,若当前特征点到第ki个聚类中心距离最短,则将当前特征点分为第ki个聚类组,并计算新的聚类中心;
12、步骤33:重复步骤32,直至聚类中心的位置不变,得到最终的聚类中心,将所述最终的聚类中心向法向方向偏置设定距离计算初始摄影测量摄站布局位置。
13、为了更好地实现本发明,进一步地,所述初始摄影测量摄站布局的相机姿态指向所述最终的聚类中心。
14、为了更好地实现本发明,进一步地,所述步骤4具体包括以下步骤:
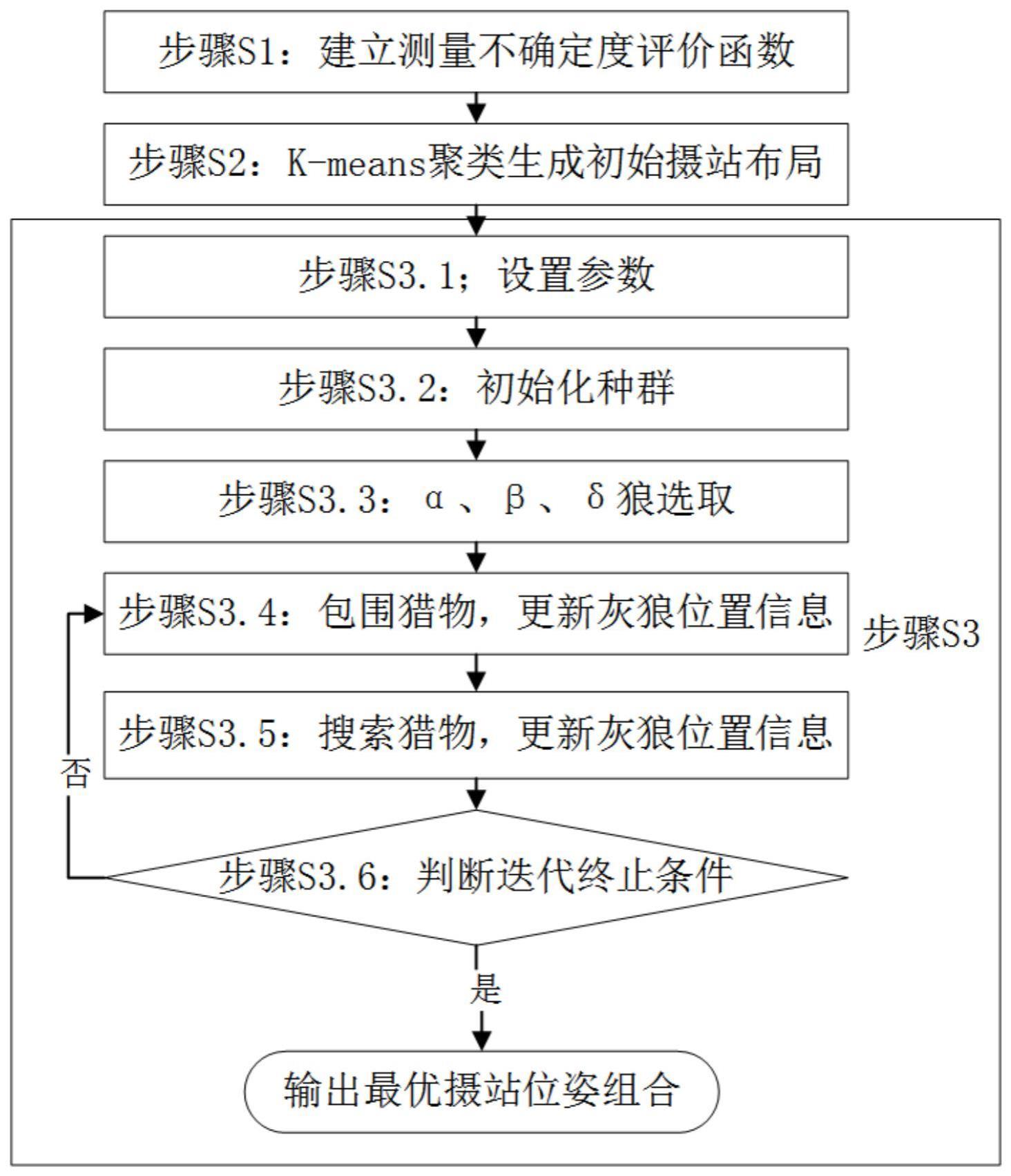
15、步骤41:设置灰狼算法的初始参数;
16、步骤42:随机生成n-1个个体作为所述灰狼算法的初始种群,并将所述初始摄影测量摄站布局位置作为个体放入所述初始种群中;
17、步骤43:将所述测量不确定度评价函数作为所述灰狼算法的目标优化函数,计算所述初始种群中所述个体的目标函数值,并选取当前目标函数值最优的解为α狼,次优的为β狼,第三优的为δ狼,其余的解为普通狼;
18、步骤44:设定猎物的位置向量、灰狼的位置向量和随机向量,更新所述所述α狼、所述β狼和所述δ狼的位置信息;
19、步骤45:设定控制向量控制灰狼的游走方向,并设定游走步长,在所述普通狼中选取n/4个个体进行随机游走,计算个体的目标函数值,保留目标函数值最大的前n个个体,并更新所述α狼、所述β狼和所述δ狼的位置;
20、步骤46:判断是否满足迭代终止条件,若满足,则将所述α狼、所述β狼和所述δ狼的位置作为最优的摄站位姿组合,得到最优的摄影测量摄站位置;若不满足,则返回步骤44。
21、为了更好地实现本发明,进一步地,所述步骤44具体包括以下步骤:
22、步骤441:保持所述α狼、所述β狼和所述δ狼的位置不变,设定猎物的位置向量、灰狼的位置向量和随机向量,结合所述α狼、所述β狼和所述δ狼的当前位置,计算灰狼个体与所述α狼、所述β狼和所述δ狼之间的距离;
23、步骤442:根据所述灰狼个体与所述α狼、所述β狼和所述δ狼之间的距离,计算普通狼朝向所述α狼、所述β狼和所述δ狼包围运动的距离,并计算移动后的最终位置;
24、步骤443:根据所述移动后的最终位置,更新所述α狼、所述β狼和所述δ狼的位置信息。
25、为了更好地实现本发明,进一步地,步骤41中所述初始参数包括种群规模n、最大迭代次数εmax、求解空间范围。
26、为了更好地实现本发明,进一步地,步骤46中所述迭代终止条件为判断是否达到设定的最大迭代次数εmax。
27、本发明具有以下有益效果:
28、(1)本发明利用k-means聚类方法进行初始布站规划,通过改进的灰狼算法优化摄站位姿组合,提高了测量的稳定性和测试精度。
29、(2)本发明通过在摄站布局保持不变的情况下完成全部测量任务,面对多架次的同型号待测对象,实施一次规划即可高效地应对全部测量任务,相比传统人工布设相机的方法,具有更高的测量效率
技术特征:
1.一种基于改进灰狼算法的摄影测量摄站布局规划方法,其特征在于,首先根据待测目标特征点的重构协方差矩阵对角线元素矩阵,确定所述待测目标特征点的重构不确定度,并根据所述重构不确定度建立测量不确定度评价函数;然后根据k-means聚类算法生成初始摄影测量摄站布局位置;最后将所述摄影测量不确定度评价函数作为灰狼算法的目标优化函数,优化所述初始摄影测量摄站布局位置,得到最优的摄影测量摄站布局位置。
2.根据权利要求1所述的一种基于改进灰狼算法的摄影测量摄站布局规划方法,其特征在于,具体包括以下步骤:
3.根据权利要求2所述的一种基于改进灰狼算法的摄影测量摄站布局规划方法,其特征在于,所述步骤3的具体包括以下步骤:
4.根据权利要求3所述的一种基于改进灰狼算法的摄影测量摄站布局规划方法,其特征在于,所述初始摄影测量摄站布局位置的相机姿态指向所述最终的聚类中心。
5.根据权利要求2所述的一种基于改进灰狼算法的摄影测量摄站布局规划方法,其特征在于,所述步骤4具体包括以下步骤:
6.根据权利要求5所述的一种基于改进灰狼算法的摄影测量摄站布局规划方法,其特征在于,所述步骤44具体包括以下步骤:
7.根据权利要求5所述的一种基于改进灰狼算法的摄影测量摄站布局规划方法,其特征在于,步骤41中所述初始参数包括种群规模n、最大迭代次数εmax、求解空间范围。
8.根据权利要求7所述的一种基于改进灰狼算法的摄影测量摄站布局规划方法,其特征在于,步骤46中所述迭代终止条件为判断是否达到设定的最大迭代次数εmax。
技术总结
本发明涉及摄影测量技术领域,具体地说,涉及一种基于改进灰狼算法的摄影测量摄站布局规划方法;该方法首先建立摄影测量不确定度评价函数;然后根据K‑means聚类算法生成初始摄影测量摄站布局位置;最后将摄影测量不确定度评价函数作为灰狼算法的目标优化函数,得到最优的摄影测量摄站布局,在传统灰狼算法基础上采用kmeans聚类算法生成初始摄影测量站位,并作为初始种群的个体,改进了灰狼算法以适应摄影测量站位规划,提升了最优站位布局的搜索速度。
技术研发人员:朱绪胜,陈代鑫,周力,刘磊,秦琪,刘树铜,刘清华,石竹风,缑建杰,文洲
受保护的技术使用者:成都飞机工业(集团)有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!