自动驾驶行为评价指标的处理方法、相关方法和设备与流程
本申请的所公开实施例涉及自动驾驶,且更具体而言,涉及一种自动驾驶行为评价指标的处理方法、相关方法和设备。
背景技术:
1、自动驾驶仿真中,会涉及到大量的驾驶数据的处理,但在实际操作中不可能对所有数据都进行人工审核,而需要进行自动化评估。此外在不同的数据中,由于关注的物体行为不一样,且不存在适用于所有类型的物体行为评价系统,若需要对不同类型的物体行为进行评价,则需要不同的行为指标进行评价。然而,不同行为指标的设计实现需要设计人员有较强的代码实现能力,即存在较高的评价成本和准入门槛。
技术实现思路
1、根据本申请的实施例,本申请提出一种自动驾驶行为评价指标的处理方法、相关方法和设备,以解决上述问题,降低物体行为评价的成本,并提高了相关操作的灵活性。
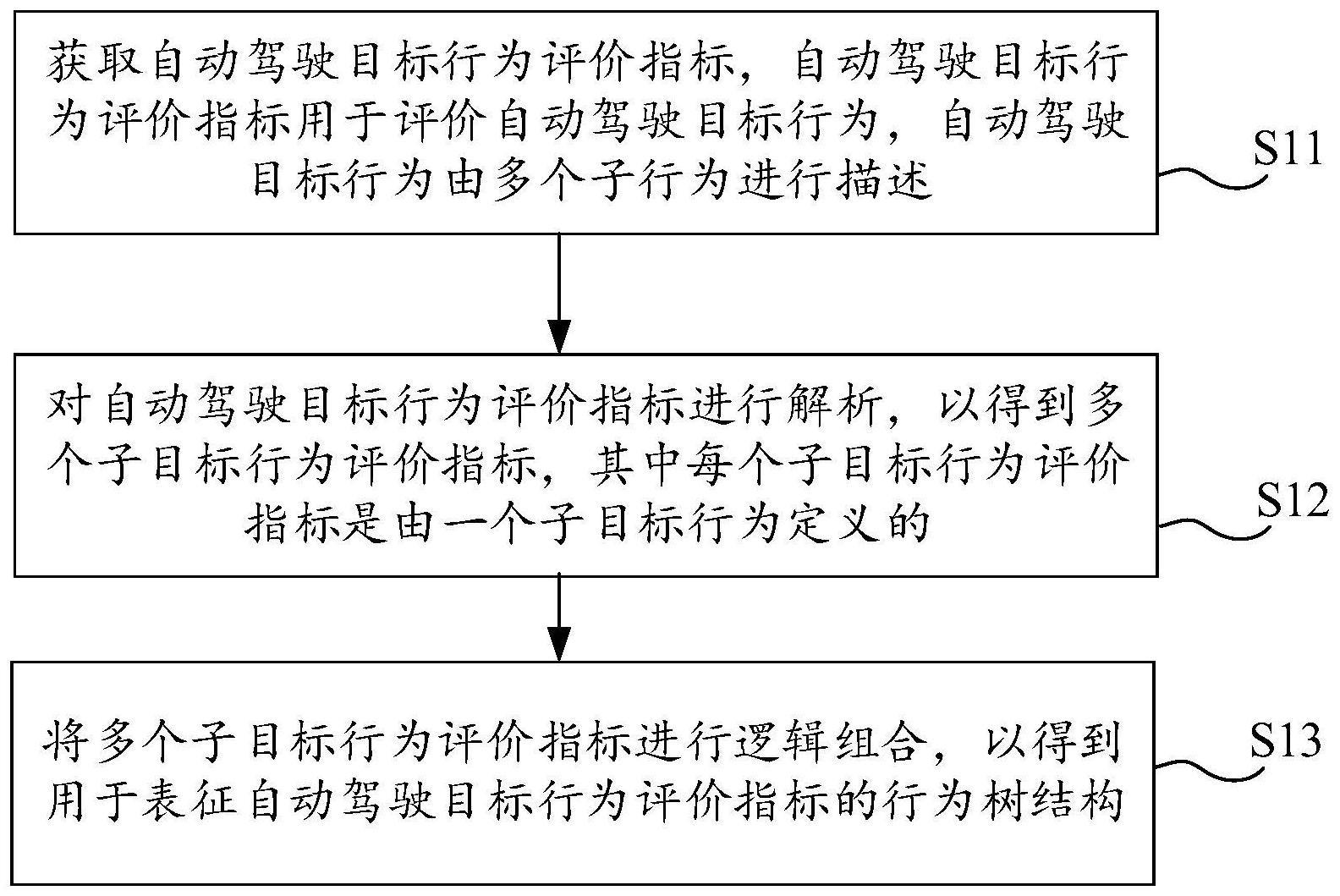
2、本申请的第一方面公开了一种自动驾驶行为评价指标的处理方法,包括:获取自动驾驶目标行为评价指标,所述自动驾驶目标行为评价指标用于评价自动驾驶目标行为,所述自动驾驶目标行为由多个子行为进行描述;对所述自动驾驶目标行为评价指标进行解析,以得到多个子目标行为评价指标,其中每个子目标行为评价指标是由一个子目标行为定义的;将所述多个子目标行为评价指标进行逻辑组合,以得到用于表征所述自动驾驶目标行为评价指标的行为树结构。
3、在一些实施例中,所述将所述多个子目标行为评价指标进行逻辑组合,以得到用于表征所述自动驾驶目标行为评价指标的行为树结构,包括:按照所述多个子目标行为评价指标对应的子目标行为的发生顺序,对所述多个子目标行为评价指标进行逻辑排序,以得到所述行为树结构。
4、在一些实施例中,所述多个子目标行为评价指标包括第一子目标行为评价指标和第二子目标行为评价指标,其中,所述第一子目标行为评价指标所对应的第一子目标行为先于所述第二子目标行为评价指标所对应的第二子目标行为,且,所述第二子目标行为在所述第一子目标行为结束之前发生,则所述第一子目标行为评价指标连接至预设逻辑函数,所述第二子目标行为评价指标从所述预设逻辑函数连接。
5、在一些实施例中,所述多个子目标行为评价指标包括第一子目标行为评价指标、第二子目标行为评价指标和第三子目标行为评价指标,其中,所述第一子目标行为评价指标所对应的第一子行为或者所述第二子目标行为评价指标所对应的第二子目标行为先于所述第三子目标行为评价指标所对应的第三子目标行为,且,所述第三子目标行为在所述第一子目标行为或所述第二子目标行为结束之前发生,则所述第一子目标行为评价指标和所述第二子目标行为评价指标连接至预设逻辑函数,所述第三子目标行为评价指标从所述预设逻辑函数连接。
6、在一些实施例中,任一所述行为树结构包括用于表示所述多个子目标行为评价指标的多个事件图形和用于表示多个预设逻辑函数的多个触发器图形,其中,所述多个子目标行为评价指标通过所述多个预设逻辑函数连接,则所述多个事件图形按照所述发生顺序,借由所述多个触发器图形顺序连接。
7、在一些实施例中,所述对所述自动驾驶目标行为评价指标进行解析,以得到多个子目标行为评价指标,包括:将所述自动驾驶目标行为评价指标拆分成多个子行为评价指标;对所述多个子行为评价指标进行优化,以得到所述多个子目标评价指标;其中,所述优化包括删除操作、合并操作、再分解操作。
8、在一些实施例中,所述多个子行为评价指标是按照如下方式中至少一个进行划分的:每个子行为评价指标表征物体行为,物体行为是否被完成而进行划分;每个子行为评价指标表征与所述自动驾驶目标行为评价指标相关的场景中的特定物体行为,特定物体行为是否能在时间和空间上进行划分而进行划分。
9、本申请第二方面公开了一种车辆行为的评价方法,包括:获取车辆驾驶数据;获取预设行为树结构;利用所述预设行为树结构,对所述车辆驾驶数据进行评价,以得到相应的评价结果,其中所述预设行为树结构是通过第一方面中所述的物体行为评价指标的设计方法得到的。
10、本申请第三方面公开了一种电子设备,包括相互耦接的存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现第一方面中所述的自动驾驶行为评价指标的处理方法,或以实现第二方面中所述的车辆行为的评价方法。
11、本申请第四方面公开了一种非易失性计算机可读存储介质,其上存储有程序指令,所述程序指令被处理器执行时实现第一方面中所述的自动驾驶行为评价指标的处理方法,或以实现第二方面中所述的车辆行为的评价方法。
12、本申请的有益效果有:通过获取自动驾驶目标行为评价指标,自动驾驶目标行为评价指标用于评价自动驾驶目标行为,自动驾驶目标行为由多个子行为进行描述,对自动驾驶目标行为评价指标进行解析,以得到多个子目标行为评价指标,其中每个子目标行为评价指标是由一个子行为定义的,进一步地,可以将多个子目标行为评价指标进行逻辑组合,得到用于表征自动驾驶目标行为评价指标的行为树结构,进而可以构建不同的物体行为评价指标,降低了物体行为评价的成本,并提高了相关操作的灵活性。
技术特征:
1.一种自动驾驶行为评价指标的处理方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述将所述多个子目标行为评价指标进行逻辑组合,以得到用于表征所述自动驾驶目标行为评价指标的行为树结构,包括:
3.根据权利要求2所述的方法,其特征在于,所述多个子目标行为评价指标包括第一子目标行为评价指标和第二子目标行为评价指标,
4.根据权利要求2所述的方法,其特征在于,所述多个子目标行为评价指标包括第一子目标行为评价指标、第二子目标行为评价指标和第三子目标行为评价指标,
5.根据权利要求2至4中任一所述的方法,其特征在于,任一所述行为树结构包括用于表示所述多个子目标行为评价指标的多个事件图形和用于表示多个预设逻辑函数的多个触发器图形,其中,所述多个子目标行为评价指标通过所述多个预设逻辑函数连接,则所述多个事件图形按照所述发生顺序,借由所述多个触发器图形顺序连接。
6.根据权利要求1所述的方法,其特征在于,所述对所述自动驾驶目标行为评价指标进行解析,以得到多个子目标行为评价指标,包括:
7.根据权利要求6所述的方法,其特征在于,所述多个子行为评价指标是按照如下方式中至少一个进行划分的:
8.一种车辆行为的评价方法,其特征在于,包括:
9.一种电子设备,其特征在于,包括相互耦接的存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现权利要求1至7任一项所述的自动驾驶行为评价指标的处理方法,或以实现权利要求8所述的车辆行为的评价方法。
10.一种非易失性计算机可读存储介质,其上存储有程序指令,其特征在于,所述程序指令被处理器执行时实现权利要求1至7任一项所述的自动驾驶行为评价指标的处理方法,或者实现权利要求8所述的车辆行为的评价方法。
技术总结
本申请公开了一种自动驾驶行为评价指标的处理。该方法包括:获取自动驾驶目标行为评价指标,所述自动驾驶目标行为评价指标用于评价自动驾驶目标行为,所述自动驾驶目标行为由多个子行为进行描述;对所述自动驾驶目标行为评价指标进行解析,以得到多个子目标行为评价指标,其中每个子目标行为评价指标是由一个子目标行为定义的;将所述多个子目标行为评价指标进行逻辑组合,以得到用于表征所述自动驾驶目标行为评价指标的行为树结构。本申请还公开了相关方法和设备。本申请降低物体行为评价的成本,并提高了相关操作的灵活性。
技术研发人员:陈志斌,周光,刘轩
受保护的技术使用者:深圳元戎启行科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!