单臂大平移管片拼装机运动学解析方法与流程
本发明涉及盾构法施工,特别涉及一种单臂大平移管片拼装机运动学解析方法。
背景技术:
1、管片拼装机是盾构法构筑隧道衬砌结构的关键部件,通过与盾构机中盾h型支撑梁固定连接,在盾尾通过人工手动操作完成目标管片的定位安装。然而,随着盾构直径逐渐增大,单块管片重量已超十吨,为此带来对拼装机结构形变控制、液压电控设计等提出了较高的要求,管片拼装安全风险也明显提高。盾构隧道智能建造已成为当前主要发展趋势,管片拼装的无人化势在必行。作为管片无人拼装技术的关键环节,拼装机末端位姿的正逆解计算方法承担着上游位姿识别技术与下游电气控制技术的衔接工作。因此,实现拼装机末端位姿解析计算是亟待解决的核心问题。
技术实现思路
1、为了解决上述问题,本发明提供了一种单臂大平移管片拼装机运动学解析方法,能够实现对单臂大平移管片拼装机的末端位姿的自动解析,且可以通过运动学模型自动逆向解析出运动机构的运动量。
2、本发明通过如下方案来实现:一种单臂大平移管片拼装机运动学解析方法,包括步骤:
3、步骤s1、分析管片拼装机中运动结构的运动机理,所述运动结构包括平移梁、回转盘、管片抓手、铰接于所述回转盘和所述管片抓手之间的回转臂、以及油缸组件,所述油缸组件包括平移油缸、回转油缸、大臂油缸、小臂油缸、俯仰油缸和偏转油缸;所述运动机理包括回转盘通过平移油缸的伸缩实现沿平移梁的纵向平移、通过回转油缸的伸缩实现绕平移梁的大回转,所述回转臂通过大臂油缸实现相对于回转盘的小回转,所述管片抓手通过小臂油缸实现相对于回转臂的小回转、通过俯仰油缸实现相对于回转臂的俯仰运动、通过偏转油缸实现相对于回转臂的偏转运动;
4、步骤s2、基于所述运动机构建立坐标系统,其中,分别以平移梁与平移油缸铰接点所在竖直平面上对应回转盘圆心的位置、回转臂和回转盘之间的第一铰接点、大臂油缸和所述回转臂之间的第二铰接点、小臂油缸和所述回转臂之间的第三铰接点为原点建立坐标系,并基于所述回转臂和所述管片抓手之间的第四铰接点、所述小臂油缸和所述管片抓手之间的第五铰接点与所述管片抓手的平面中心点的位置关系建立以所述平面中心点为原点的坐标系;
5、步骤s3、利用转换矩阵t描述坐标系oixiyizi相对于oi-1xi-1yi-1zi-1的位姿变换,i为1~n的整数,n不小于6,建立管片拼装机的运动学模型。
6、本发明单臂大平移管片拼装机运动学解析方法的进一步改进在于:所述第二铰接点和所述第三铰接点均位于所述回转臂的同一位置;在建立坐标系统时,仅需以所述第二铰接点和所述第三铰接点中的任意一个为原点建立坐标系。
7、本发明单臂大平移管片拼装机运动学解析方法的进一步改进在于,在进行步骤s2时:
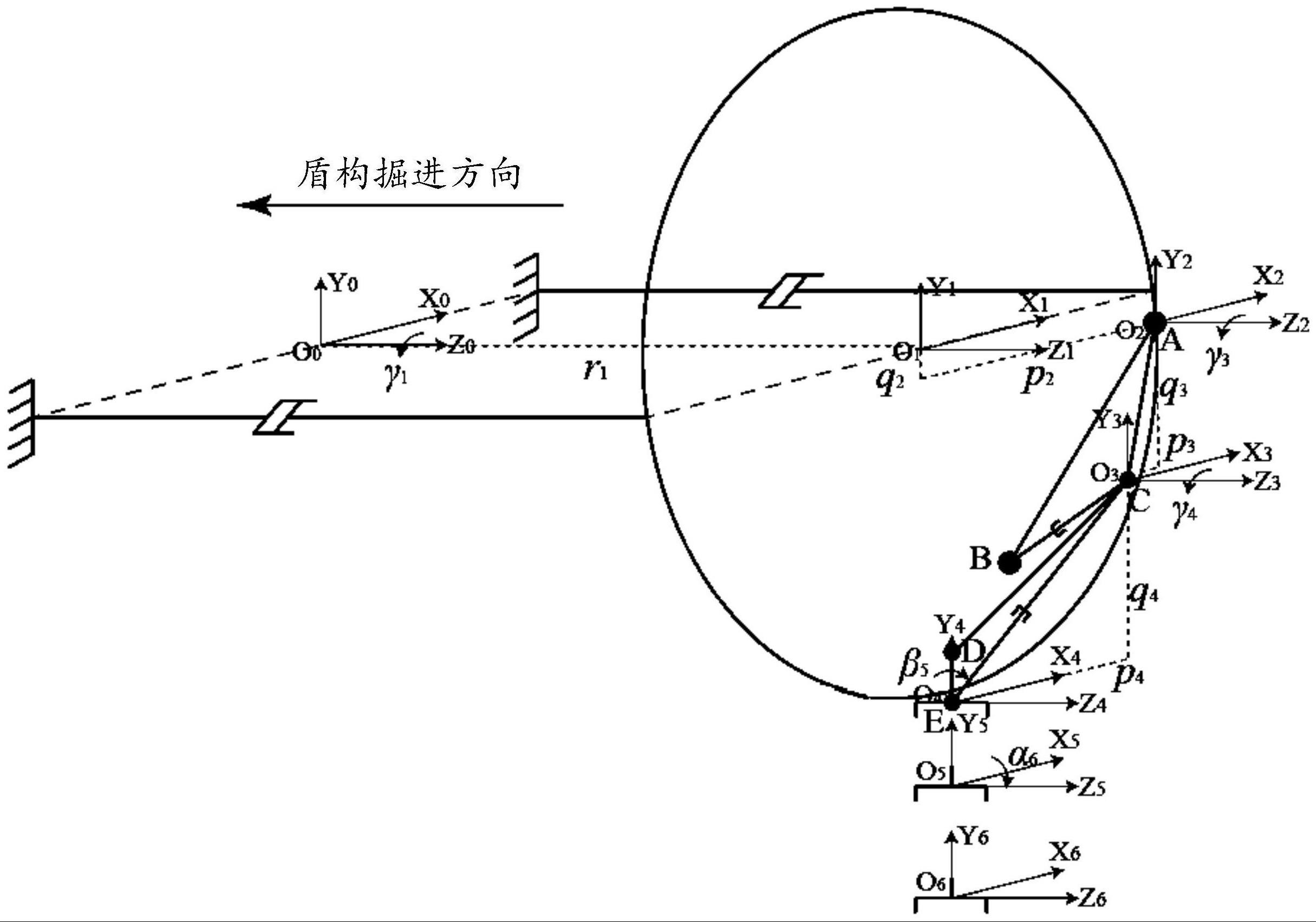
8、以所述回转盘的圆心向所述平移梁与平移油缸铰接点所在竖直平面做垂线得到的垂足为o0点,盾构机推进方向的反方向为z0轴正方向,竖直向上方向为y0轴正方向,建立右手直角坐标系o0x0y0z0;
9、在o0x0y0z0的基础上沿z0轴方向移动r1,并绕z0轴旋转γ1,建立坐标系o1x1y1z1,使o1位于所述回转臂中轴线所在的竖直平面且对应于所述回转盘的圆心位置上:
10、在o1x1y1z1的基础上分别沿x1轴、y1轴方向移动p2、q2,建立坐标系o2x2y2z2,使o2位于所述第一铰接点处;
11、在o2x2y2z2的基础上绕z2轴旋转γ3,并分别沿x2轴、y2轴方向移动p3、q3,建立坐标系o3x3y3z3,使o3位于所述第二铰接点或所述第三铰接点上;
12、在o3x3y3z3的基础上绕z3轴旋转γ4,并分别沿x3轴、y3轴方向移动p4、q4,建立坐标系o4x4y4z4,使o4位于所述平面中心点上;
13、在o4x4y4z4的基础上绕y4轴旋转β5,建立o5x5y5z5,β5为由所述偏转油缸的行程引起的所述管片抓手的偏转角度;
14、在o5x5y5z5的基础上绕x5轴旋转α6,建立o6x6y6z6,α6为由所述俯仰油缸的行程引起的所述管片抓手的俯仰角度。
15、本发明单臂大平移管片拼装机运动学解析方法的进一步改进在于:所述第四铰接点和所述第五铰接点的位置满足在所述管片抓手为水平状态时,所述第四铰接点与所述平面中心点竖向正对,所述第五铰接点与所述平面中心点纵向正对;在建立坐标系o4x4y4z4时,将所述第五铰接点作为所述平面中心点,使o4位于所述第五铰接点上。
16、本发明单臂大平移管片拼装机运动学解析方法的进一步改进在于,所述转换矩阵其中:r为拼装机末端的3×3姿态矩阵;s为拼装机末端的3×1位移矩阵。
17、本发明单臂大平移管片拼装机运动学解析方法的进一步改进在于,还包括步骤s4、根据所述运动学模型,考虑所述运动机构的运动范围,进行运动学逆解解析。
18、本发明基于单臂大平移管片拼装机的结构特点和运动机理,合理建立坐标系统,尤其是在同时与多个油缸存在关联的回转臂上选择若干关键点分解建立坐标系,并利用转换矩阵将各坐标系关联起来生成运动学模型,实现了对单臂大平移管片拼装机的末端位姿的自动解析,相应的,可以通过运动学模型逆向解析出运动机构的运动量,便于单臂大平移管片拼装机实现无人自动化拼装。
技术特征:
1.一种单臂大平移管片拼装机运动学解析方法,其特征在于,包括步骤:
2.如权利要求1所述的单臂大平移管片拼装机运动学解析方法,其特征在于:所述第二铰接点和所述第三铰接点均位于所述回转臂的同一位置;在建立坐标系统时,仅需以所述第二铰接点和所述第三铰接点中的任意一个为原点建立坐标系。
3.如权利要求2所述的单臂大平移管片拼装机运动学解析方法,其特征在于,在进行步骤s2时:
4.如权利要求3所述的单臂大平移管片拼装机运动学解析方法,其特征在于:所述第四铰接点和所述第五铰接点的位置满足在所述管片抓手为水平状态时,所述第四铰接点与所述平面中心点竖向正对,所述第五铰接点与所述平面中心点纵向正对;在建立坐标系o4x4y4z4时,将所述第五铰接点作为所述平面中心点,使o4位于所述第五铰接点上。
5.如权利要求1所述的单臂大平移管片拼装机运动学解析方法,其特征在于,所述转换矩阵其中:r为拼装机末端的3×3姿态矩阵;s为拼装机末端的3×1位移矩阵。
6.如权利要求1所述的单臂大平移管片拼装机运动学解析方法,其特征在于,还包括步骤s4、根据所述运动学模型,考虑所述运动机构的运动范围,进行运动学逆解解析。
技术总结
本发明涉及一种单臂大平移管片拼装机运动学解析方法,包括步骤:分析管片拼装机中运动结构的运动机理;基于运动机构建立坐标系统,其中,分别以平移油缸固定端所在竖向平面上对应回转盘圆心的位置、回转臂和回转盘之间的第一铰接点、大臂油缸和回转臂之间的第二铰接点、小臂油缸和回转臂之间的第三铰接点为原点建立坐标系,并基于回转臂和管片抓手之间的第四铰接点、小臂油缸和管片抓手之间的第五铰接点与管片抓手的平面中心点的位置关系建立以平面中心点为原点的坐标系;利用转换矩阵T描述坐标系O<subgt;i</subgt;X<subgt;i</subgt;Y<subgt;i</subgt;Z<subgt;i</subgt;相对于O<subgt;i‑1</subgt;X<subgt;i‑1</subgt;Y<subgt;i‑1</subgt;Z<subgt;i‑1</subgt;的位姿变换,i为1~n的整数,n不小于6,建立管片拼装机的运动学模型。本发明实现了对单臂大平移管片拼装机末端位姿的自动正逆解解析。
技术研发人员:朱叶艇,王泽源,庄欠伟,翟一欣,黄昕,秦元,黄德中,吴文斐,杨正,梁贇露,章博雅,蔡丹丹,谭露
受保护的技术使用者:上海隧道工程有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!