一种交通场景下的关键目标检测方法及系统
本发明属于计算机视觉,涉及一种交通场景关键目标检测方法及系统,具体涉及一种基于分类任务再解耦的交通场景关键目标检测方法及系统。
背景技术:
1、基于道路交通场景下关键目标(行人、车辆、车道、交通标识、障碍物等)检测技术的无人驾驶辅助系统,能够有效降低人为因素引发交通事故的概率。对海上交通场景下的关键目标(船舶、航标、灯塔、岛礁等)检测识别以确保航运和海洋工程安全的需求日益紧迫。
2、然而,从交通场景中获取的图像由于其全天候、全天时要求,往往质量较低,外部环境和流量对象本身也增加了这种复杂性。陆上和海上交通场景的背景复杂多变,且存在雾霾、暴雨等恶劣天气的影响。交通场景图像还容易受到光照条件的影响,极大的影响了交通场景下的关键目标检测方法的准确性。同时,交通场景下的不同目标实例尺度差异较大,且存在遮挡等情况,这对检测方法的多尺度检测能力有较高的要求。此外,交通场景下的部分关键目标类间特征差异较小,这可能导致误检。如何降低环境因素的影响,减少误检,提高检测算法的鲁棒性,已经成为交通场景下的关键目标检测领域中亟需解决的难题。
3、交通场景下的关键目标检测技术旨在对交通场景中的目标如汽车、行人、骑手、船舶等关键目标进行定位与分类。早期的传统目标检测方法如acf等,往往只能实现单类别的目标检测任务,且检测精度较低。近年来,随着人工智能(ai)技术的快速发展,涌现一大批基于深度学习的目标检测算法。基于深度学习的方法通过深度卷积神经网络学习目标特征,直接预测目标的类别与定位信息。然而目前的研究主要聚焦于目标检测中分类任务与边框回归任务之间的相关性解耦问题上。目前主流的目标检测方法如fcos和dyhead等,通常将分类和边框回归任务解耦,分别构建各自的特征提取分支。这些方法虽然一定程度上提高了目标检测的精度,但是他们很少利用分类任务再解耦的潜力,且应用于交通场景下的关键目标检测任务时,上述难题仍然存在。
技术实现思路
1、为了解决上述技术问题,本发明结合基于深度学习目标检测算法,提供了一种交通场景下的关键目标检测方法及系统。
2、本发明的方法所采用的技术方案是:一种交通场景下的关键目标检测方法,包括以下步骤:
3、步骤1:获取交通视频,并提取视频图像高维特征;
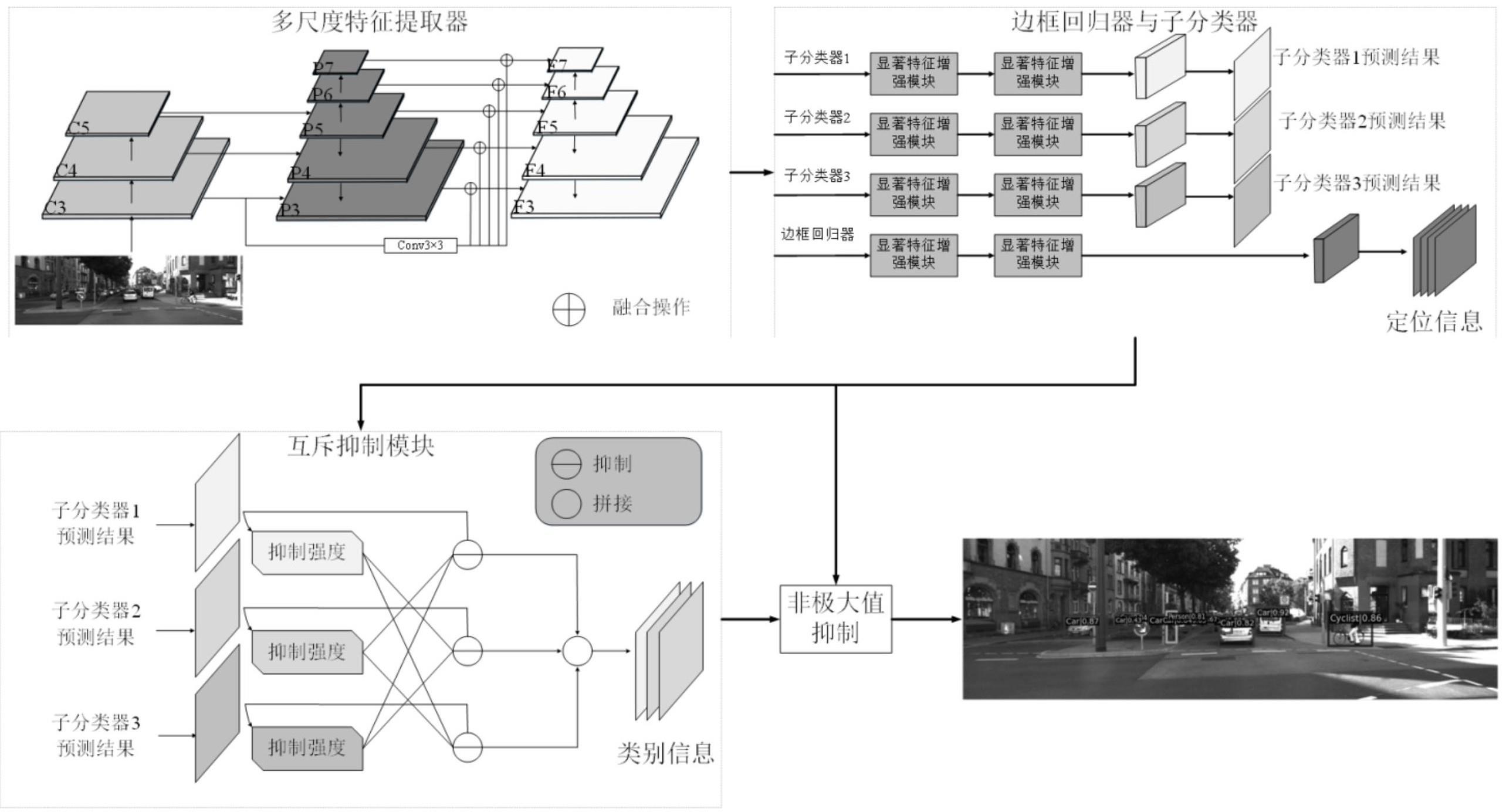
4、步骤2:提取高维度的多尺度特征;
5、步骤3:对多尺度特征进行处理,提取显著性多尺度特征;
6、步骤4:对提取的显著性多尺度特征进行处理,实现边框回归与多个子类别预测,得到关键目标的定位信息与类别信息,
7、步骤5:约束分类结果减少误检;
8、步骤6:将步骤4中得到的定位信息与步骤5中得到的约束后的分类结果进行结合,消除冗余检测框,得到最终的关键目标定位信息与类别信息。
9、本发明的系统所采用的技术方案是:一种交通场景下的关键目标检测系统,包括以下模块:
10、第一模块,用于获取交通视频,并提取视频图像高维特征;
11、第二模块,用于提取高维度的多尺度特征;
12、第三模块,用于对多尺度特征进行处理,提取显著性多尺度特征;
13、第四模块,用于对提取的显著性多尺度特征进行处理,实现边框回归与多个子类别预测,得到关键目标的定位信息与类别信息,
14、第五模块,用于约束分类结果减少误检;
15、第六模块,用于将第四模块中得到的定位信息与第五模块中得到的约束后的分类结果进行结合,消除冗余检测框,得到最终的关键目标定位信息与类别信息。
16、与现有的检测方法相比,本发明具有以下的优点与积极效果:
17、(1)本发明使用显著特征提取模块对多尺度特征进行显著性增强,有效降低极端天气等环境因素对目标检测器性能的影响。
18、(2)本发明提出基于分类再解耦的检测头,能够有效的提取类间差异更大的分类特征,有利于降低关键目标的分类任务难度。
19、(3)本发明构建了互斥抑制模块,有利于减少类别之间的误检。
技术特征:
1.一种交通场景下的关键目标检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的交通场景下的关键目标检测方法,其特征在于:步骤2中,利用多尺度特征提取器,得到多尺度表达能力更强的多尺度特征;
3.根据权利要求1所述的交通场景下的关键目标检测方法,其特征在于:步骤3中,利用显著性特征提取模块,得到显著性多尺度特征;
4.根据权利要求1所述的交通场景下的关键目标检测方法,其特征在于:步骤4中,通过边框回归器与若干个子分类器得到关键目标的定位与类别信息,实现边框回归与多个子类别预测;
5.根据权利要求4所述的交通场景下的关键目标检测方法,其特征在于:步骤5中,所述边框回归器与子分类器,均是训练好的边框回归器与子分类器;
6.根据权利要求1所述的交通场景下的关键目标检测方法,其特征在于:步骤5中,通过互斥抑制模块约束分类结果减少误检;
7.根据权利要求1所述的交通场景下的关键目标检测方法,其特征在于:步骤6中,采用非极大值抑制方法,消除冗余检测框,其步骤如下;
8.根据权利要求1-7任意一项所述的交通场景下的关键目标检测方法,其特征在于:步骤4中,得到待检测目标的边框信息,其中,h和w分别表示定位信息的长度和宽度,其乘积为预测框的数量;
9.根据权利要求1-7任意一项所述的交通场景下的关键目标检测方法,其特征在于:步骤5中,设置互斥性阈值,计算第i个子分类器的输出对其他子分类器的互斥性强度:
10.一种交通场景下的关键目标检测系统,其特征在于,包括以下模块:
技术总结
本发明公开了一种交通场景下的关键目标检测方法及系统,首先获取交通视频,并提取视频图像高维特征,提取高维度的多尺度特征;然后对多尺度特征进行处理,提取显著性多尺度特征;对提取的显著性多尺度特征进行处理,实现边框回归与多个子类别预测,得到关键目标的定位信息与类别信息;接着约束分类结果减少误检;最后将定位信息与约束后的分类结果进行结合,消除冗余检测框,得到最终的关键目标定位信息与类别信息。本发明能够在复杂多变的陆上或海上交通场景下快速并准确的检测出行驶或静止状态下的关键目标,实现交通场景下的关键目标的智能监控或用于无人驾驶系统中的环境感知任务。
技术研发人员:王中元,华捷,胡珊,张羽飞,常军,李明
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!