一种融合深度信息的机坪小目标检测方法与流程
本发明涉及一种目标检测方法,具体涉及一种融合深度信息的机坪小目标检测方法。
背景技术:
1、专利《一种停机坪上反光锥筒摆放的自动识别方法》(申请号cn201811228974.x)基于反光锥筒与飞机关联部位的空间关系相对固定的判定,利用图像配准的方法来预测反光锥筒在待检测图片上的标准位置。该方法存在明显的缺陷:在监控图像中,反光锥筒属于小目标,用图像配准方法难以对小目标进行特征点提取,因而该方法对准确率难以保证。
2、专利《一种民航停机坪上的轮档摆放规范的自动识别方法》(申请号cn202110295767.1)公开了一种民航停机坪上的轮挡摆放规范的自动识别方法,该方法要求将轮挡制作成具有指定的反光标识和颜色,之后采用深度学习模型检测机轮位置,并在机轮位置检测是否存在轮挡。该方法具有明显的缺陷:首先,该方法要求将轮挡制作为具有指定的反光标识和颜色,这样会增加机场设备维保人员的工作量和机场运营成本;其次,基于神经网络的目标检测技术容易受到天气、光照和目标尺寸等影响,检测准确率难以保证。
技术实现思路
1、本发明所要解决的技术问题是提供了一种融合深度信息的机坪小目标检测方法,解决现有的目标检测算法在解决小目标检测问题中的准确度和召回率问题。
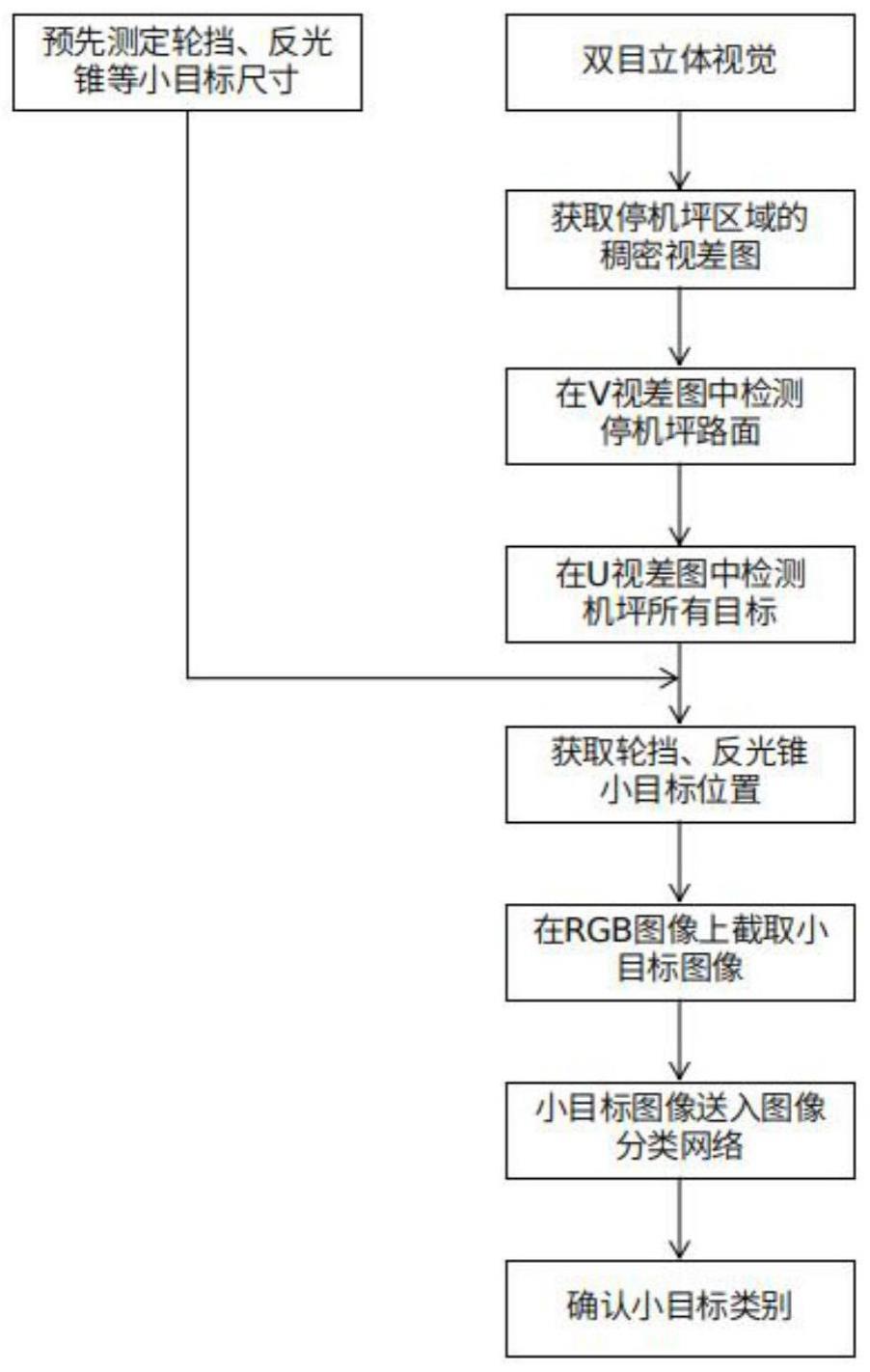
2、本发明融合深度信息的机坪小目标检测方法是通过以下技术方案来实现的:具体包括以下步骤:
3、s1、预先测定轮挡、反光锥等小目标尺寸;
4、s2、利用双目相机拍摄左右图像,通过双目立体匹配算法,获取当前场景的视差图;
5、s3、根据视差图,计算得到对应的u-v视差图,并在u-v视差图上获取机坪上的轮挡、反光锥等小目标;
6、s4、根据视差图小目标检测结果,在对应的rgb图像上提取目标图像;
7、s5、将目标图像输入训练好的图像分类模型,得到目标类别结果。
8、作为优选的技术方案,在所述步骤s2的前提下,通过双目立体视觉技术获取停机坪区域的稠密视差图。
9、作为优选的技术方案,步骤s3,在v视差图中提取停机坪路面所在位置;在u视差图中检测停机坪所有目标。
10、作为优选的技术方案,步骤s4,根据在uv视差图中检测到的目标位置,结合预先设定好的小目标尺寸标准,在所有目标中过滤得到符合预先设定的小目标信息,并在rgb图像中获取对应位置截图,保存小目标截图。
11、作为优选的技术方案,步骤s5,将小目标截图送入到对应的图像分类网络,输出目标类别信息,得到最终的小目标检测结果。
12、本发明的有益效果是:
13、1、通过双目立体视觉提取小目标区域,有效的解决了轮挡、反光锥等小目标检测的问题;
14、2、进一步的,通过训练一个简单的分类器网络,对输入的小目标图像进行分类,输出类别信息;
15、3、融合了深度信息的机坪轮挡、反光锥检测方法,极大提高了机坪小目标的检出率和准确率。同时,因为引入了立体视觉技术进行小目标区域的提取,提高了算法运行效率,减少了算法模型的训练复杂度。
技术特征:
1.一种融合深度信息的机坪小目标检测方法,其特征在于:具体包括以下步骤:
2.根据权利要求1所述的融合深度信息的机坪小目标检测方法,其特征在于:在所述步骤s2的前提下,通过双目立体视觉技术获取停机坪区域的稠密视差图。
3.根据权利要求1所述的融合深度信息的机坪小目标检测方法,其特征在于:所述步骤s3,在v视差图中提取停机坪路面所在位置;在u视差图中检测停机坪所有目标。
4.根据权利要求1所述的融合深度信息的机坪小目标检测方法,其特征在于:所述步骤s4,根据在uv视差图中检测到的目标位置,结合预先设定好的小目标尺寸标准,在所有目标中过滤得到符合预先设定的小目标信息,并在rgb图像中获取对应位置截图,保存小目标截图。
5.根据权利要求1所述的融合深度信息的机坪小目标检测方法,其特征在于:所述步骤s5,将小目标截图送入到对应的图像分类网络,输出目标类别信息,得到最终的小目标检测结果。
技术总结
本发明公开了一种融合深度信息的机坪小目标检测方法,具体包括以下步骤:S1、预先测定轮挡、反光锥等小目标尺寸;S2、利用双目相机拍摄左右图像,通过双目立体匹配算法,获取当前场景的视差图;S3、根据视差图,计算得到对应的U‑V视差图,并在U‑V视差图上获取机坪上的轮挡、反光锥等小目标;S4、根据视差图小目标检测结果,在对应的RGB图像上提取目标图像;S5、将目标图像输入训练好的图像分类模型,得到目标类别结果;本发明通过双目立体视觉提取小目标区域,有效的解决了轮挡、反光锥等小目标检测的问题;通过训练一个简单的分类器网络,对输入的小目标图像进行分类,输出类别信息。
技术研发人员:樊治国,夏克江
受保护的技术使用者:青岛高重信息科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!