水位识别方法及系统与流程
本发明涉及水位识别领域,尤其涉及一种水位识别方法及系统。
背景技术:
1、现有的船舶监测卡口处,需要准确的识别得到水位值,以方便进一步对船舶的识别等计算过程提供基础数据。
2、现有技术中对水位的识别方法大致分为两种,第一种方法是通过图像识别,主要通过安装水尺,然后采集包含水尺的图像,确定水位线处于水尺的哪个刻度来实现水位测量。这种方法存在以下问题:受摄像头安装距离、位置等限制,同时受光照因素、雾天气影响大,在夜晚或者恶劣的天气条件下,现有摄像头采集的视频或者图像质量不高,清晰度不足、分辨率不够,导致发生识别错误的情况。
3、第二种是通过水位测量传感器,比如有障碍物或者漂浮物时会影响精度,并容易受到主流摆动和泥沙淤积等不利因素影响。
4、针对现有技术中的以上问题,目前还没有一个有效的解决方法。
技术实现思路
1、为解决上述问题,本发明提供了一种水位识别方法及系统,通过激光雷达获取点云数据后,自调节的水位模拟高度值分割出倒影和实体,然后通过镜像变化,计算重叠率和匹配距离误差,以解决现有技术中摄像头采集容易受环境因素干扰、漂浮物会影响精度且倒影位置难以划分的问题。
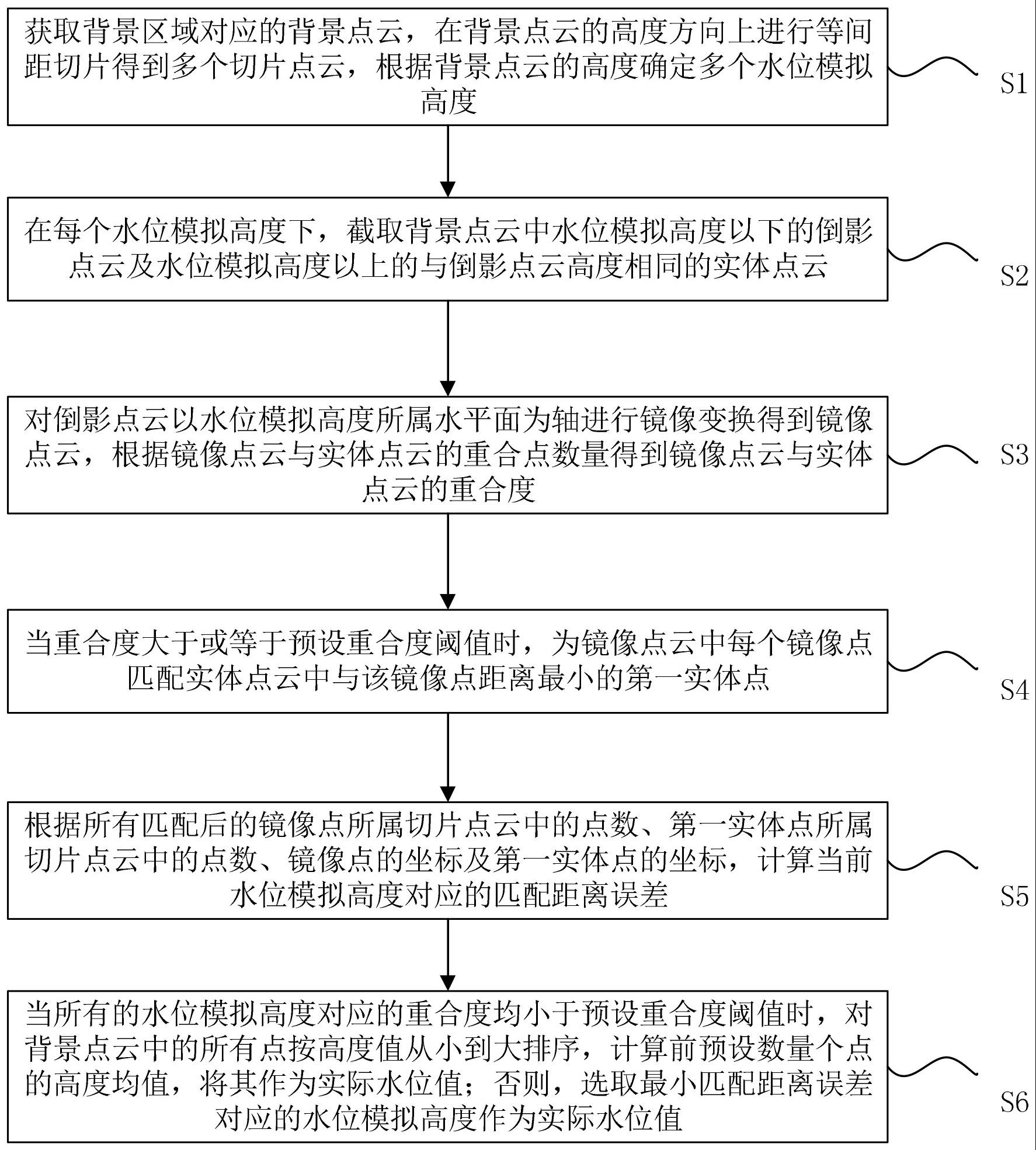
2、为达到上述目的,本发明提供了一种水位识别方法,包括:获取背景区域对应的背景点云,在背景点云的高度方向上进行等间距切片得到多个切片点云,根据所述背景点云的高度确定多个水位模拟高度;在每个水位模拟高度下,截取背景点云中水位模拟高度以下的倒影点云及水位模拟高度以上的与倒影点云高度相同的实体点云;对所述倒影点云以水位模拟高度所属水平面为轴进行镜像变换得到镜像点云,根据所述镜像点云与所述实体点云的重合点数量得到镜像点云与实体点云的重合度;当所述重合度大于或等于预设重合度阈值时,为镜像点云中每个镜像点匹配实体点云中与该镜像点距离最小的第一实体点;根据所有匹配后的镜像点所属切片点云中的点数、第一实体点所属切片点云中的点数、镜像点的坐标及第一实体点的坐标,计算当前水位模拟高度对应的匹配距离误差;当所有的水位模拟高度对应的重合度均小于预设重合度阈值时,对所述背景点云中的所有点按高度值从小到大排序,计算前预设数量个点的高度均值,将其作为实际水位值;否则,选取最小匹配距离误差对应的水位模拟高度作为实际水位值。
3、进一步可选的,所述根据所有匹配后的镜像点所属切片点云中的点数、第一实体点所属切片点云中的点数、镜像点的坐标及第一实体点的坐标,计算当前水位模拟高度对应的匹配距离误差,包括:根据所述镜像点所属切片点云中的点数,及匹配的第一实体点所属切片点云中的点数计算得到对应匹配点对的数量比系数;计算每个匹配点对中镜像点与第一实体点之间的点对距离,根据所有匹配点对的数量比系数及点对距离计算得到匹配距离误差。
4、进一步可选的,所述根据所述镜像点云与所述实体点云的重合点数量得到镜像点云与实体点云的重合度包括:对于所述镜像点云中的每个镜像点,在所述实体点云中计算与该镜像点距离最小的第二实体点;当所述第二实体点与对应的镜像点距离小于预设距离阈值时,将重合点数量加一;遍历所有镜像点得到最终的重合点数量,计算重合点数量与所述镜像点云中镜像点的数量之比,得到所述重合度。
5、进一步可选的,所述获取背景区域对应的背景点云包括:获取激光雷达扫描得到的原始点云数据;选取所述背景区域对应的边缘点坐标;根据所述边缘点坐标从所述原始点云数据中截取得到所述背景点云。
6、进一步可选的,所述根据所述背景点云的高度确定多个水位模拟高度,包括:根据所述背景点云z方向上的最大值及最小值确定所述背景点云的高度;以背景点云的高度的一半为最高水位模拟高度,以预设调节间隔为最低水位模拟高度,从最低水位模拟高度到最高水位模拟高度之间每隔预设调节间隔设置一个水位模拟高度。
7、另一方面,本发明还提供了一种水位识别系统,包括:数据处理模块,用于获取背景区域对应的背景点云,在背景点云的高度方向上进行等间距切片得到多个切片点云,根据所述背景点云的高度确定多个水位模拟高度;点云截取模块,用于在每个水位模拟高度下,截取背景点云中水位模拟高度以下的倒影点云及水位模拟高度以上的与倒影点云高度相同的实体点云;重合度计算模块,用于对所述倒影点云以水位模拟高度所属水平面为轴进行镜像变换得到镜像点云,根据所述镜像点云与所述实体点云的重合点数量得到镜像点云与实体点云的重合度;匹配模块,用于当所述重合度大于或等于预设重合度阈值时,为镜像点云中每个镜像点匹配实体点云中与该镜像点距离最小的第一实体点;匹配距离误差计算模块,用于根据所有匹配后的镜像点所属切片点云中的点数、第一实体点所属切片点云中的点数、镜像点的坐标及第一实体点的坐标,计算当前水位模拟高度对应的匹配距离误差;实际水位值计算模块,用于当所有的水位模拟高度对应的重合度均小于预设重合度阈值时,对所述背景点云中的所有点按高度值从小到大排序,计算前预设数量个点的高度均值,将其作为实际水位值;否则,选取最小匹配距离误差对应的水位模拟高度作为实际水位值。
8、进一步可选的,所述匹配距离误差计算模块包括:数量比系数计算子模块,用于根据所述镜像点所属切片点云中的点数,及匹配的第一实体点所属切片点云中的点数计算得到对应匹配点对的数量比系数;综合计算子模块,用于计算每个匹配点对中镜像点与第一实体点之间的点对距离,根据所有匹配点对的数量比系数及点对距离计算得到匹配距离误差。
9、进一步可选的,所述重合度计算模块包括:匹配子模块,用于对于所述镜像点云中的每个镜像点,在所述实体点云中计算与该镜像点距离最小的第二实体点;判定子模块,用于当所述第二实体点与对应的镜像点距离小于预设距离阈值时,将重合点数量加一;重合度计算子模块,用于遍历所有镜像点得到最终的重合点数量,计算重合点数量与所述镜像点云中镜像点的数量之比,得到所述重合度。
10、进一步可选的,所述数据处理模块包括:数据获取子模块,用于获取激光雷达扫描得到的原始点云数据;范围选定子模块,用于选取所述背景区域对应的边缘点坐标;背景点云截取子模块,用于根据所述边缘点坐标从所述原始点云数据中截取得到所述背景点云。
11、进一步可选的,所述数据处理模块,包括:高度确定子模块,用于根据所述背景点云z方向上的最大值及最小值确定所述背景点云的高度;水位模拟高度确定子模块,用于以背景点云的高度的一半为最高水位模拟高度,以预设调节间隔为最低水位模拟高度,从最低水位模拟高度到最高水位模拟高度之间每隔预设调节间隔设置一个水位模拟高度。
12、上述技术方案具有如下有益效果:在夜晚和大雾等恶劣天气下,点云数据的质量不会像图像那样受到影响,而且既能适用在较窄的内河河道上,同样适用于情况复杂的航道和河道较宽的江面,具有较好的通用性;此外,通过自调节的水位模拟高度值分割出倒影和实体,然后通过镜像变化,计算重叠率和匹配距离误差,解决了是否存在倒影和倒影的具体位置等问题,识别出较高精度的水位值。
技术特征:
1.一种水位识别方法,其特征在于,包括:
2.根据权利要求1所述的水位识别方法,其特征在于,所述根据所有匹配后的镜像点所属切片点云中的点数、第一实体点所属切片点云中的点数、镜像点的坐标及第一实体点的坐标,计算当前水位模拟高度对应的匹配距离误差,包括:
3.根据权利要求1所述的水位识别方法,其特征在于,所述根据所述镜像点云与所述实体点云的重合点数量得到镜像点云与实体点云的重合度包括:
4.根据权利要求1所述的水位识别方法,其特征在于,所述获取背景区域对应的背景点云包括:
5.根据权利要求1所述的水位识别方法,其特征在于,所述根据所述背景点云的高度确定多个水位模拟高度,包括:
6.一种水位识别系统,其特征在于,包括:
7.根据权利要求6所述的水位识别系统,其特征在于,所述匹配距离误差计算模块包括:
8.根据权利要求6所述的水位识别系统,其特征在于,所述重合度计算模块包括:
9.根据权利要求6所述的水位识别系统,其特征在于,所述数据处理模块包括:
10.根据权利要求6所述的水位识别系统,其特征在于,所述数据处理模块,包括:
技术总结
本发明公开了一种水位识别方法及系统,其中该方法包括:获取背景区域对应的背景点云,在背景点云的高度方向上进行等间距切片得到多个切片点云,根据背景点云的高度确定多个水位模拟高度;在每个水位模拟高度下,截取背景点云中水位模拟高度以下的倒影点云及实体点云;对倒影点云进行镜像变换得到镜像点云,根据镜像点云与实体点云的重合点数量得到重合度;当重合度大于或等于预设重合度阈值时,为镜像点云中每个镜像点匹配实体点云中与该镜像点距离最小的第一实体点云;根据所有匹配后的镜像点及第一实体点计算匹配距离误差;选取最小匹配距离误差对应的水位模拟高度作为实际水位值。提高了水位识别的精度。
技术研发人员:陈奇,俞伟娜,钱茂俊,沈琳,林远福
受保护的技术使用者:浙江华是科技股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!