定位的准确性确定方法、装置、电子设备和存储介质与流程
本公开涉及智能驾驶,尤其涉及一种定位的准确性确定方法、装置、电子设备和存储介质。
背景技术:
1、定位置信度表示当前定位位姿的准确程度。现有方法在新建地图上进行定位时,由于定位位置所扫描到的环境点云和地图匹配程度较高,此时得到该位置的置信度也较高,此时为位姿准确度的真阳性。当前定位位姿正确时,随着环境的缓慢累积变化和动态物体的侵入,导致在定位位置所扫描的环境点云与地图之间的匹配程度较差,当前帧点云与地图匹配得到平均分低,得到一个较低的置信度,此时为位姿准确度的假阴性。当前定位位姿错误时,当前帧点云与地图匹配错位发生误匹配现象,导致给出一个较高的置信度,此时为位姿准确度的假阳性。
2、因此,目前的方法定位置信度的鲁棒性较差,易出现定位置信度假阳性和假阴性的情况。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开实施例提供了一种定位的准确性确定方法、装置、电子设备和存储介质,解决现有技术中易出现定位置信度假阳性和假阴性的问题,实现了对当前帧位姿定位是否准确的可靠判断。
2、第一方面,本公开实施例提供了一种定位的准确性确定方法,该方法包括:
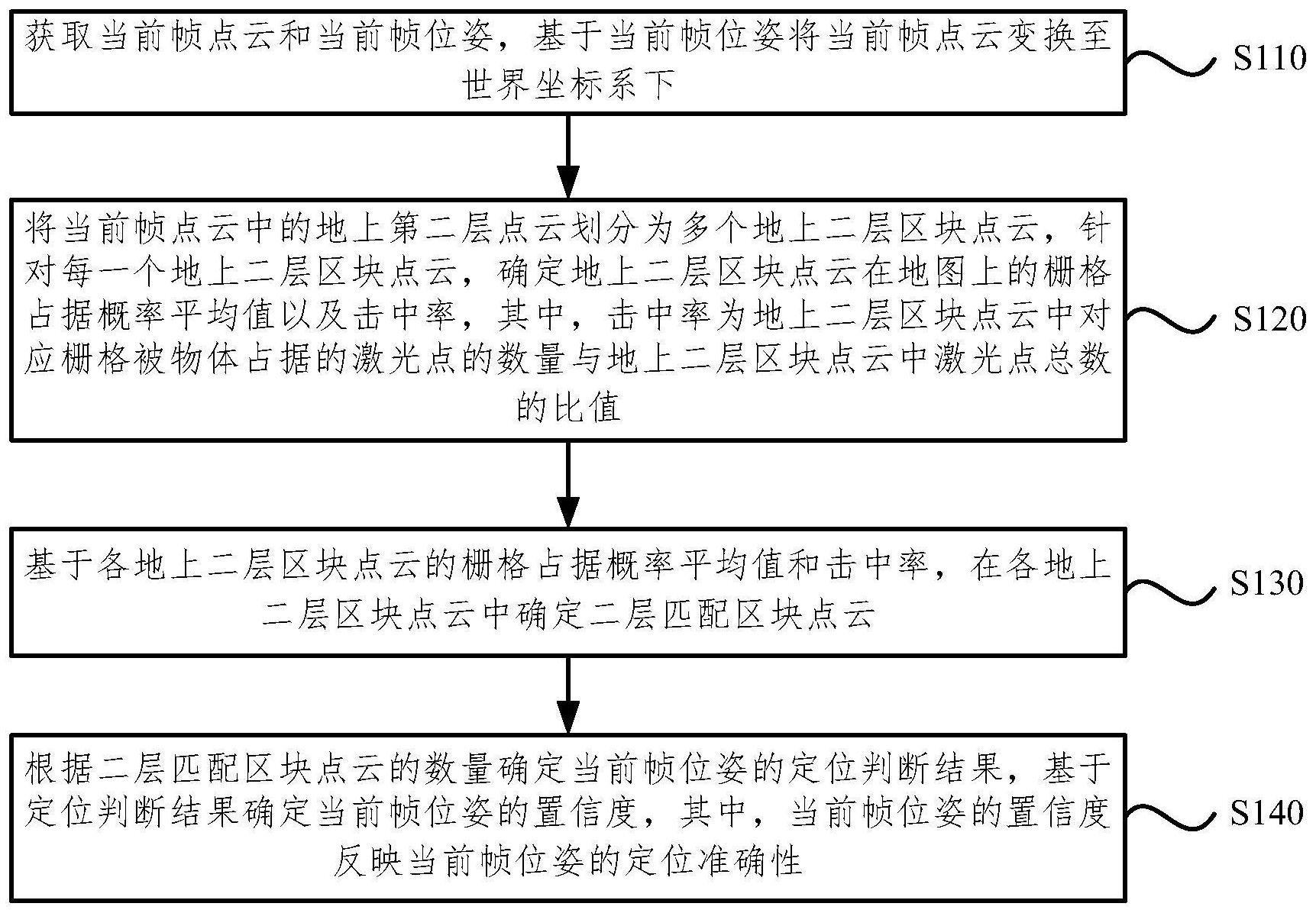
3、获取当前帧点云和当前帧位姿,基于所述当前帧位姿将所述当前帧点云变换至世界坐标系下;
4、将所述当前帧点云中的地上第二层点云划分为多个地上二层区块点云,针对每一个所述地上二层区块点云,确定所述地上二层区块点云在地图上的栅格占据概率平均值以及击中率,其中,所述击中率为所述地上二层区块点云中对应栅格被物体占据的激光点的数量与所述地上二层区块点云中激光点总数的比值;
5、基于各所述地上二层区块点云的栅格占据概率平均值和击中率,在各所述地上二层区块点云中确定二层匹配区块点云;
6、根据所述二层匹配区块点云的数量确定所述当前帧位姿的定位判断结果,基于所述定位判断结果确定所述当前帧位姿的置信度,其中,所述当前帧位姿的置信度反映所述当前帧位姿的定位准确性。
7、第二方面,本公开实施例还提供了一种定位的准确性确定装置,该装置包括:
8、变换模块,用于获取当前帧点云和当前帧位姿,基于所述当前帧位姿将所述当前帧点云变换至世界坐标系下;
9、统计模块,用于将所述当前帧点云中的地上第二层点云划分为多个地上二层区块点云,针对每一个所述地上二层区块点云,确定所述地上二层区块点云在地图上的栅格占据概率平均值以及击中率,其中,所述击中率为所述地上二层区块点云中对应栅格被物体占据的激光点的数量与所述地上二层区块点云中激光点总数的比值;
10、匹配模块,用于基于各所述地上二层区块点云的栅格占据概率平均值和击中率,在各所述地上二层区块点云中确定二层匹配区块点云;
11、确定模块,用于根据所述二层匹配区块点云的数量确定所述当前帧位姿的定位判断结果,基于所述定位判断结果确定所述当前帧位姿的置信度,其中,所述当前帧位姿的置信度反映所述当前帧位姿的定位准确性。
12、第三方面,本公开实施例还提供了一种电子设备,所述电子设备包括:一个或多个处理器;存储装置,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上所述的定位的准确性确定方法。
13、第四方面,本公开实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上所述的定位的准确性确定方法。
14、本公开实施例提供的一种定位的准确性确定方法,通过获取当前帧点云和当前帧位姿,根据当前帧位姿将当前帧点云变换至世界坐标系下,进而将当前帧点云中的地上第二层点云划分为多个地上二层区块点云,针对其中每一个地上二层区块点云,确定其在地图上的栅格占据概率平均值以及击中率,通过栅格占据概率平均值以及击中率从中筛选出二层匹配区块点云,基于二层匹配区块点云的数量确定当前帧位姿的定位判断结果,从而根据定位判断结果确定当前帧位姿的置信度,以筛选出地上第二层点云这种潜在的不易变化的地图区域,用不易变化的地图区域的栅格占据概率平均值以及击中率计算定位的置信度,解决了现有技术中易出现定位置信度假阳性和假阴性的问题,提高了定位置信度的鲁棒性,实现了对当前帧位姿定位是否准确的可靠判断,并且,该方法经过确定定位判断结果以及根据定位判断结果确定置信度两个阶段来输出置信度,可以使置信度表达位姿是否准确的区分性更强。
技术特征:
1.一种定位的准确性确定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述定位判断结果确定所述当前帧位姿的置信度,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于各所述二层匹配区块点云的栅格占据概率平均值和击中率确定所述当前帧位姿的置信度,包括:
4.根据权利要求2所述的方法,其特征在于,所述基于各所述二层匹配区块点云的栅格占据概率平均值和击中率确定所述当前帧位姿的置信度,包括:
5.根据权利要求1所述的方法,其特征在于,在将所述当前帧点云中的地上第二层点云划分为多个地上二层区块点云之前,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述根据所述二层匹配区块点云的数量确定所述当前帧位姿的定位判断结果,包括:
7.根据权利要求6所述的方法,其特征在于,所述根据各所述当前帧区块点云和各所述上一帧区块点云确定所述当前帧点云与所述上一帧点云之间的环境分布相似度,包括:
8.一种定位的准确性确定装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述的方法。
技术总结
本公开实施例公开了一种定位的准确性确定方法,通过获取当前帧点云和当前帧位姿,根据当前帧位姿将当前帧点云变换至世界坐标系下,进而将当前帧点云中的地上第二层点云划分为多个地上二层区块点云,针对其中每一个地上二层区块点云,确定其在地图上的栅格占据概率平均值以及击中率,从中筛选出二层匹配区块点云,基于二层匹配区块点云的数量确定当前帧位姿的定位判断结果,从而根据定位判断结果确定当前帧位姿的置信度,以通过不易变化的地图区域的栅格占据概率平均值以及击中率计算定位的置信度,解决了现有技术中易出现定位置信度假阳性和假阴性的问题,提高了定位置信度的鲁棒性,使置信度表达位姿是否准确的区分性更强。
技术研发人员:林鑫,冯景怡,张丹
受保护的技术使用者:驭势科技(北京)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!