PIN针缺陷检测方法、装置、设备及计算机可读存储介质与流程
本申请涉及缺陷检测,具体涉及一种pin针缺陷检测方法、装置、设备及计算机可读存储介质。
背景技术:
1、pin针是一种在电子设备中极为常见的连接外部设备的部件,用来完成电信号的导电传输的一种金属物质,具有通信连接可靠、拆装便捷的优点,这些优点使其广泛应用于印刷电路板(pcb,printed circuit board)、3c(计算机、通讯和消费电子产品)和汽车电子等行业。
2、插接pin针的设备会设有对应的孔洞,pin针插入孔洞实现连接,随着应用行业的快速发展,对pin针的品质要求越来越高。
3、pin针的高度和位置度出现偏差,就会导致例如插接异常、通信异常等问题,造成信息传递不稳定。因此,对于pin针的缺陷检测显得尤为重要。
4、现有技术中,都是利用两组2d相机获得pin针的图像,结构复杂,需要将两组2d相机获的图像进行整合,效率比较低。而且两组2d相机与产品的相对拍摄位置波动时对检测结果影响较大,因此,造成pin针缺陷检测不准确。
技术实现思路
1、有鉴于此,本申请实施例提供一种pin针缺陷检测方法、装置、设备及计算机可读存储介质,能够提高pin针缺陷检测的准确性和效率。
2、第一方面,本申请实施例提供一种pin针缺陷检测方法,包括:
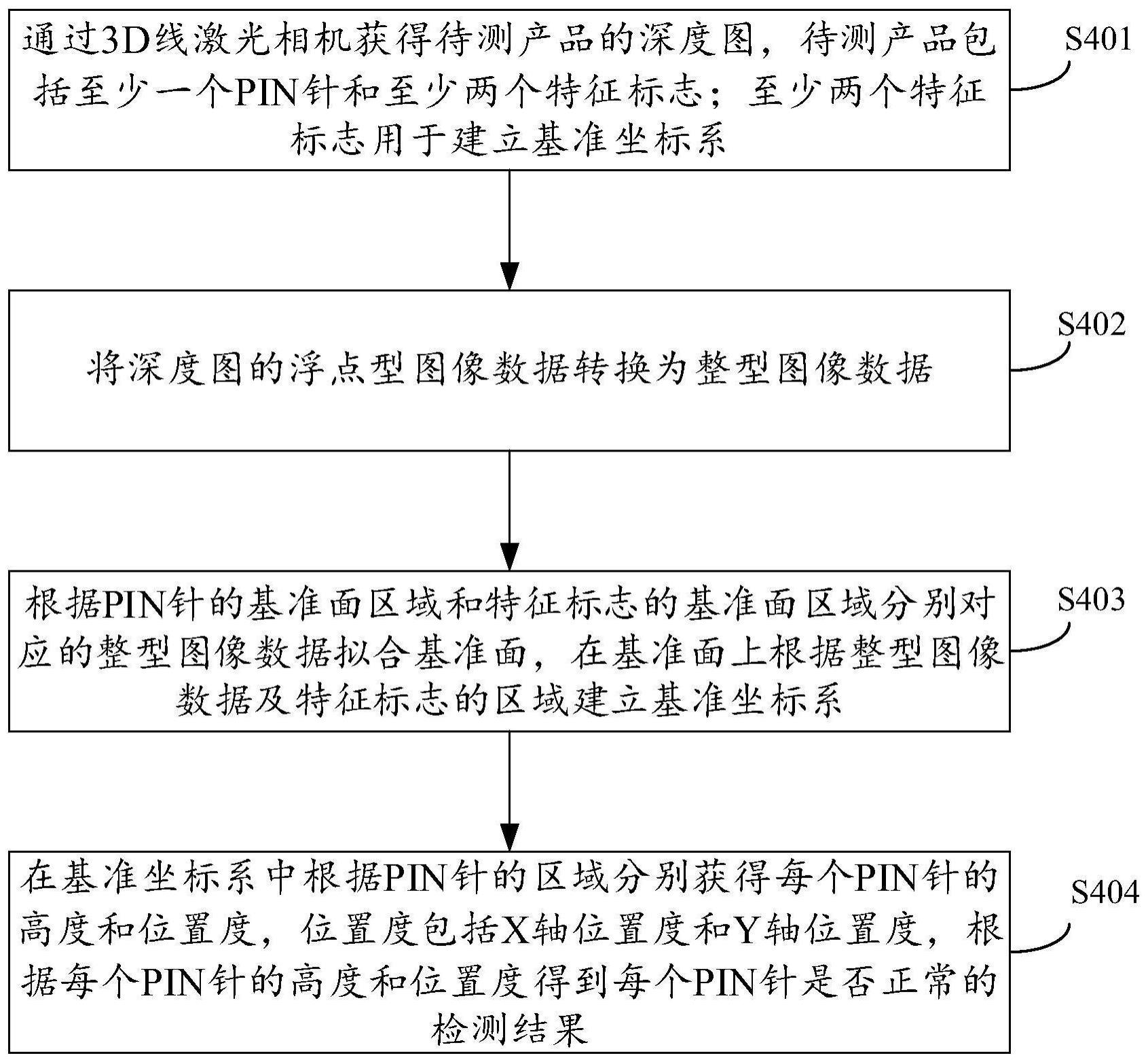
3、通过3d线激光相机获得待测产品的深度图,待测产品包括至少一个pin针和至少两个特征标志;至少两个特征标志用于建立基准坐标系;
4、将深度图的浮点型图像数据转换为整型图像数据;
5、根据pin针的基准面区域和特征标志的基准面区域分别对应的整型图像数据拟合基准面,在基准面上根据整型图像数据及特征标志的区域建立基准坐标系;
6、在基准坐标系中根据pin针的区域分别获得每个pin针的高度和位置度,位置度包括x轴位置度和y轴位置度;根据每个pin针的高度和位置度得到每个pin针是否正常的检测结果。
7、第二方面,本申请实施例还提供一种pin针缺陷检测装置,包括:
8、获得模块,用于通过3d线激光相机获得待测产品的深度图,待测产品包括至少一个pin针和至少两个特征标志;至少两个特征标志用于建立基准坐标系;
9、预处理模块,用于将深度图的浮点型图像数据转换为整型图像数据;
10、拟合模块,用于根据pin针的基准面区域和特征标志的基准面区域分别对应的整型图像数据拟合基准面;
11、构建模块,用于在基准面上根据整型图像数据及特征标志的区域建立基准坐标系;
12、计算模块,用于在基准坐标系中根据pin针的区域分别获得每个pin针的高度和位置度,位置度包括x轴位置度和y轴位置度;
13、检测模块,用于根据每个pin针的高度和位置度得到每个pin针是否正常的检测结果。
14、第三方面,本申请实施例还提供一种计算机设备,计算机设备包括存储器和处理器,存储器存储有计算机程序,处理器执行该计算机程序时实现以上方法的步骤。
15、第四方面,本申请实施例还提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现以上方法的步骤。
16、第五方面,本申请实施例还提供一种计算机程序产品,计算机程序产品包括计算机程序,该计算机程序被处理器执行时实现以上方法的步骤。
17、由此可见,本申请实施例具有如下有益效果:
18、本申请实施例提供的pin针缺陷检测方法,利用3d线激光相机可以仅用一张图像便可以得到待测产品的三维立体数据,可以直接用深度图的深度值来反应pin针高度,获得pin针的最高点与基准面的距离,即点与面之间的距离来获得pin针高度,利用pin针的坐标与基准坐标系中x轴和y轴之间的距离来获得位置度。并且本申请为了利用2d的成熟算法,先将浮点型数据转换为整型数据,计算简单且准确。相对于传统的2d视觉,本申请提供的方法仅用处理一个图像,计算量小,而且仅用一个相机可以同时检测位置度和高度,能够提高pin针缺陷检测的准确性和效率。
技术特征:
1.一种pin针缺陷检测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在根据所述pin针的基准面区域和所述特征标志的基准面区域分别对应的所述整型图像数据拟合基准面之前,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述方法还包括通过以下方式预先获得所述位置偏差:
4.根据权利要求1所述的方法,其特征在于,所述根据所述pin针的基准面区域和所述特征标志的基准面区域分别对应的所述整型图像数据拟合基准面,包括:
5.根据权利要求1所述的方法,其特征在于,所述至少两个特征标志包括第一定位柱和第二定位柱;
6.根据权利要求2所述的方法,其特征在于,所述在所述基准坐标系中根据所述pin针的区域分别获得每个pin针的高度和位置度,包括:
7.根据权利要求5所述的方法,其特征在于,所述第一定位柱位于所有pin针所包围的空间内,所述第二定位柱位于所有pin针所包围的空间外;所述pin针为变压器的pin针。
8.一种pin针缺陷检测装置,其特征在于,包括:
9.一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请实施例公开了一种PIN针缺陷检测方法、装置、设备及计算机可读存储介质,方法包括:通过3D线激光相机获得待测产品的深度图,待测产品包括至少一个PIN针和至少两个特征标志;至少两个特征标志用于建立基准坐标系;将深度图的浮点型图像数据转换为整型图像数据;根据PIN针的基准面区域和特征标志的基准面区域分别对应的整型图像数据拟合基准面,在基准面上根据整型图像数据及特征标志的区域建立基准坐标系;在基准坐标系中根据PIN针的区域分别获得每个PIN针的高度和位置度,位置度包括X轴位置度和Y轴位置度;根据每个PIN针的高度和位置度得到每个PIN针是否正常的检测结果。该方法计算量小,能够提高PIN针缺陷检测的准确性和效率。
技术研发人员:蔡光湖,曹鹏飞,刘枢,吕江波,沈小勇
受保护的技术使用者:深圳思谋信息科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!