一种位置关系确定方法、装置、设备及存储介质与流程
本发明实施例涉及辅助驾驶,尤其涉及一种位置关系确定方法、装置、设备及存储介质。
背景技术:
1、在盲区监测领域,准确识别可行驶区域中的关注目标,例如人或骑手,能够有效避免事故发生。
2、现在有技术中通常采用识别目标框在可行驶区域内的整体占比确定目标和可行驶区域的位置关系,但这种方式需监测的像素点数量较多,导致识别耗时量大。
技术实现思路
1、本发明提供一种位置关系确定方法、装置、设备及存储介质,用于简化目标于可行驶区域位置关系的确定过程。
2、第一方面,本发明实施例提供了一种目标与可行驶区域的位置关系确定方法,包括:
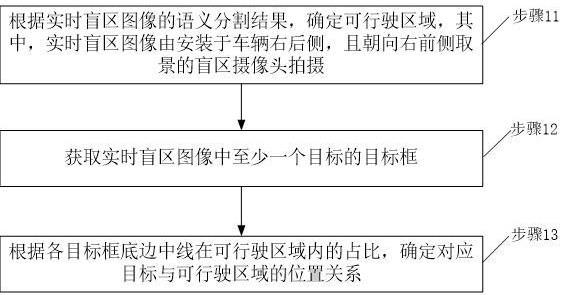
3、根据实时盲区图像的语义分割结果,确定可行驶区域,其中,所述实时盲区图像由安装于车辆右后侧,且朝向右前侧取景的盲区摄像头拍摄;
4、获取所述实时盲区图像中至少一个目标的目标框;
5、根据各所述目标框底边中线在所述可行驶区域内的占比,确定对应目标与所述可行驶区域的位置关系。
6、可选的,所述根据实时盲区图像的语义分割结果,确定可行驶区域包括:
7、获取所述实时盲区图像的语义分割结果;
8、对所述语义分割结果进行从左至右的横向扫描;
9、未扫描到关注目标,或者,扫描到关注目标,且其右侧为马路时,确定路沿或障碍物边缘为所述可行驶区域的边界;
10、扫描到关注目标,且其右侧不是马路时,确定所述关注目标的左边界为所述可行驶区域的边界;
11、其中,所述关注目标为人。
12、可选的,所述对所述语义分割结果进行从左至右的横向扫描包括:
13、对所述语义分割结果中n行像素点进行从左至右的横向扫描,其中,n行像素中相邻行间隔1行或多行像素点设置,n为大于1的整数。
14、可选的,所述确定对应目标与所述可行驶区域的位置关系之后,还包括:
15、判断连续m个图像中的k个图像内,同一目标均在可行驶区域内,则确定该目标在可行驶区域内。
16、可选的,所述根据实时盲区图像的语义分割结果,确定可行驶区域包括:
17、根据实时盲区图像的语义分割结果,确定可行驶区域的边界;
18、对所述边界进行平滑处理。
19、可选的,所述关注目标为一个行人或骑手,或者,为两个以上在所述实时盲区图像中有交叠区域的行人或骑手。
20、第二方面,本发明实施例还提供了一种目标与可行驶区域的位置关系确定装置,包括:
21、区域确定模块,用于根据实时盲区图像的语义分割结果,确定可行驶区域,其中,所述实时盲区图像由安装于车辆右后侧,且朝向右前侧取景的盲区摄像头拍摄;
22、目标框获取模块,用于获取所述实时盲区图像中至少一个目标的目标框;
23、关系确定模块,用于根据各所述目标框底边中线在所述可行驶区域内的占比,确定对应目标与所述可行驶区域的位置关系。
24、可选的,所述区域确定模块包括:
25、结果获取单元,用于获取所述实时盲区图像的语义分割结果;
26、结果扫描单元,用于对所述语义分割结果进行从左至右的横向扫描;
27、第一边界确定单元,用于在未扫描到关注目标,或者,扫描到关注目标,且其右侧为马路时,确定路沿或障碍物边缘为所述可行驶区域的边界;
28、第二边界确定单元,用于在扫描到关注目标,且其右侧不是马路时,确定所述关注目标的左边界为所述可行驶区域的边界;
29、其中,所述关注目标为人。
30、第三方面,本发明实施例还提供了一种设备,所述设备包括:
31、一个或多个处理器;
32、存储装置,用于存储一个或多个程序,
33、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如第一方面所述的目标与可行驶区域的位置关系确定方法。
34、第四方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的目标与可行驶区域的位置关系确定方法。
35、本发明实施例提供的技术方案,通过根据实时盲区图像的语义分割结果,确定可行驶区域,其中,所述实时盲区图像由安装于车辆右后侧,且朝向右前侧取景的盲区摄像头拍摄;获取所述实时盲区图像中至少一个目标的目标框;根据各所述目标框底边中线在所述可行驶区域内的占比,确定对应目标与所述可行驶区域的位置关系。实现了仅采用目标框下底边中线在可行驶区域内的占比判断对应目标于可行驶区域的位置关系,需识别的像素点少,能够有效简化目标于可行驶区域位置关系的确定过程。
技术特征:
1.一种目标与可行驶区域的位置关系确定方法,其特征在于,包括:
2.根据权利要求1所述的位置关系确定方法,其特征在于,所述根据实时盲区图像的语义分割结果,确定可行驶区域包括:
3.根据权利要求2所述的位置关系确定方法,其特征在于,所述对所述语义分割结果进行从左至右的横向扫描包括:
4.根据权利要求1所述的位置关系确定方法,其特征在于,所述确定对应目标与所述可行驶区域的位置关系之后,还包括:
5.根据权利要求1所述的位置关系确定方法,其特征在于,所述根据实时盲区图像的语义分割结果,确定可行驶区域包括:
6.根据权利要求2所述的位置关系确定方法,其特征在于,所述关注目标为一个行人或骑手,或者,为两个以上在所述实时盲区图像中有交叠区域的行人或骑手。
7.一种目标与可行驶区域的位置关系确定装置,其特征在于,包括:
8.根据权利要求7所述的位置关系确定装置,其特征在于,所述区域确定模块包括:
9.一种设备,其特征在于,所述设备包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-6中任一所述的目标与可行驶区域的位置关系确定方法。
技术总结
本发明公开了一种位置关系确定方法、装置、设备及存储介质,所述位置关系确定方法包括根据实时盲区图像的语义分割结果,确定可行驶区域,其中,所述实时盲区图像由安装于车辆右后侧,且朝向右前侧取景的盲区摄像头拍摄;获取所述实时盲区图像中至少一个目标的目标框;根据各所述目标框底边中线在所述可行驶区域内的占比,确定对应目标与所述可行驶区域的位置关系。本发明实施例提供的技术方案,仅采用目标框下底边中线在可行驶区域内的占比判断对应目标于可行驶区域的位置关系,需识别的像素点少,能够有效简化目标于可行驶区域位置关系的确定过程。
技术研发人员:徐显杰,马玉珍,窦汝振,包永亮
受保护的技术使用者:天津所托瑞安汽车科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!