基于多时相光学和极化雷达遥感影像水稻种植区识别方法与流程
本发明涉及农业遥感,尤其涉及一种基于多时相光学和极化雷达遥感影像水稻种植区识别方法。
背景技术:
1、水稻是人类赖以生存的重要粮食作物之一。遥感技术能提供长期持续的地球观测数据,来监测水稻种植区、掌握分布格局和预估总体产量,实现精准农业和智慧农业。光学影像在近红外与短波红外波段对农作物有较好的区分。但常因云雾覆盖难以获得高质量遥感影像,而雷达影像能够穿透云雾、全天候、全天时、不易受天气条件和日照影响。借助水稻的后向散射系数随时相变化明显,结合雷达与光学影像更好地识别和监测水稻。
2、相较于传统机器学习方法,深度神经网络可以学习和反映输入数据的本质特征,增强对特征信息的识别和利用能力,提高影像解译的性能。然而,现有方法主要利用单源数据,未充分利用多源遥感影像的互补优势信息,限制了解译算法的可靠性。在利用多时相数据识别水稻时,未考虑不同年份间水稻生长周期差异,直接应用训练好的模型,严重影响模型的泛化性能和解译结果。
3、有鉴于此,本发明利用不同物候期的光学影像和polsar影像的波段信息和极化信息训练水稻监测的深度卷积神经网络模型,且考虑到气象差异导致的水稻生长周期变化,在对不同年份影像集进行水稻识别前采用一种自适应的迁移机制,以确保其具备较强的跨年度泛化性能。
4、因此,提出一种基于多时相光学和极化雷达遥感影像水稻种植区识别方法,来解决现有技术存在的困难,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种基于多时相光学和极化雷达遥感影像水稻种植区识别方法,不仅在训练年份达到了高识别精度,在其他年份也获得了良好的解译结果,且分类图中的水稻种植田呈现连续分布态势,更符合实际情形。
2、为了实现上述目的,本发明采用如下技术方案:
3、基于多时相光学和极化雷达遥感影像水稻种植区识别方法,包括以下步骤:
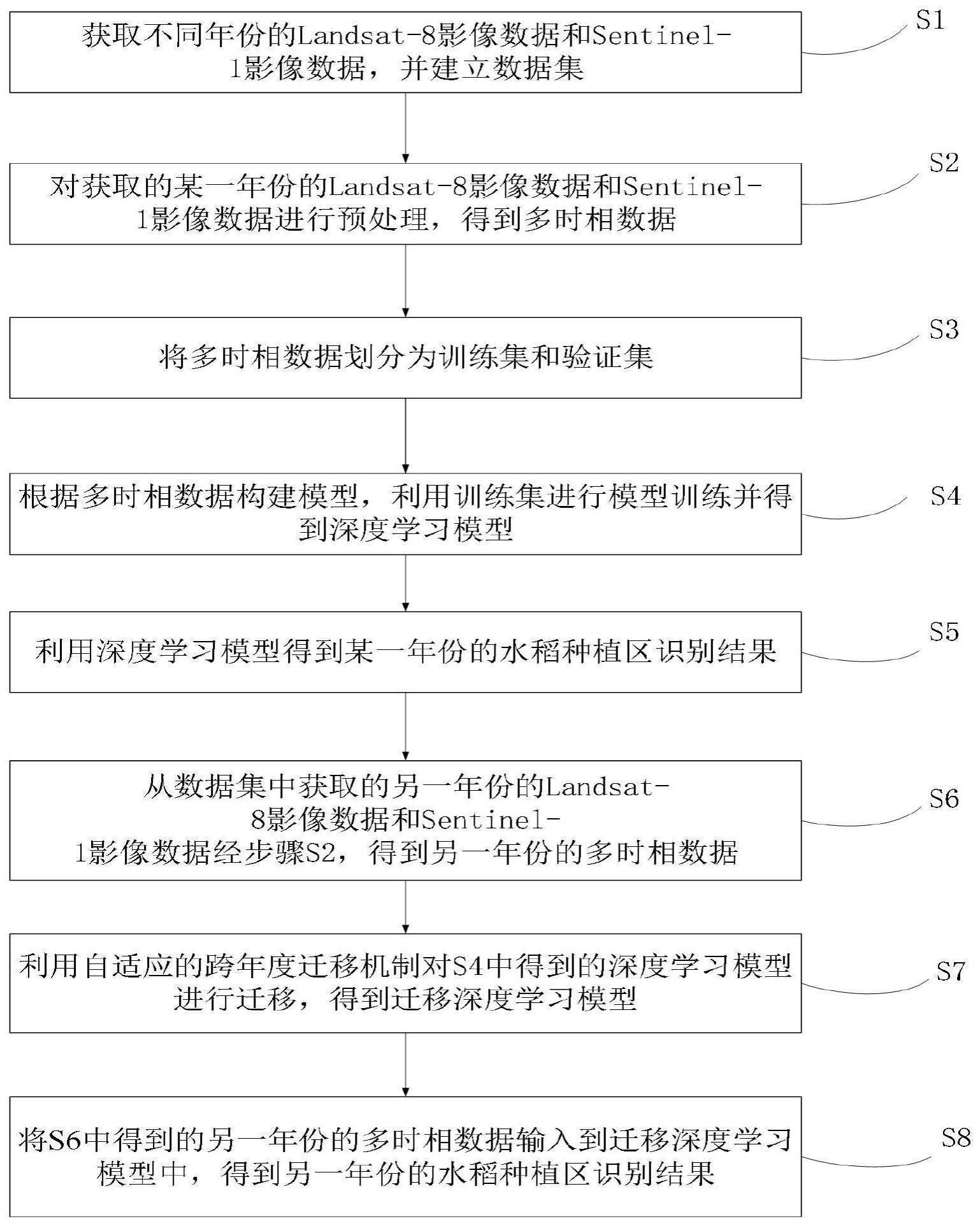
4、s1.构建数据集:获取不同年份的landsat-8影像数据和sentinel-1影像数据,并建立数据集;
5、s2.数据预处理:对获取的某一年份的landsat-8影像数据和sentinel-1影像数据进行预处理,得到多时相数据;
6、s3.数据划分:将多时相数据划分为训练集和验证集;
7、s4.模型构建:根据多时相数据构建模型,利用训练集进行模型训练并得到深度学习模型;
8、s5.识别步骤:利用深度学习模型得到某一年份的水稻种植区识别结果;
9、s6.再获取步骤:从数据集中获取的另一年份的landsat-8影像数据和sentinel-1影像数据经步骤s2,得到另一年份的多时相数据;
10、s7.模型迁移:利用自适应的跨年度迁移机制对s4中得到的深度学习模型进行迁移,得到迁移深度学习模型;
11、s8.再识别步骤:将s6中得到的另一年份的多时相数据输入到迁移深度学习模型中,得到另一年份的水稻种植区识别结果。
12、可选的,s1中landsat-8数据从地理空间数据云获取,sentinel-1数据从esa数据分发网站获取。
13、可选的,s2中利用envi软件对landsat-8影像数据进行辐射校正、大气校正、重采样、裁剪预处理;对sentinel-1影像数据进行极化相干斑滤波、地理编码预处理。
14、可选的,s2中得到的多时相数据包括但不限于水稻不同生长时期的光学影像多波段特征、polsar影像的多极化振幅、相位和极化分解参数。
15、可选的,s3数据划分中训练集和验证集比例为7:3。
16、可选的,s4中模型构建的具体内容为:
17、搭建u-net网络架构模型框架;
18、输入训练集并对模型进行训练学习;
19、根据模型训练学习情况实时对模型超参数进行调节;
20、将完成训练的模型保存。
21、可选的,s7中自适应的跨年度迁移机制的具体内容为:
22、采用相似图像对匹配策略,在其他年份找到与水稻识别模型训练年份所用影像相似的影像对,实现输入影像日期的自适应调整,使模型应用在其他年份中。
23、可选的,相似图像对匹配策略的具体内容为:
24、用wishart似然比计算sar影像上水稻种植区内同一位置各像素对之间的相似度,并将所有像素对相似度的平均值作为图像对之间的散射相似度,在其他年份中,将与水稻识别模型训练年份所用影像相似度最接近的影像作为相似影像对。
25、可选的,wishart似然比计算公式为:
26、
27、对(1)式取对数并舍去常数项,得到最终的似然比检验值:
28、q2=ln|x|+ln|y|-2|x+y| (2)
29、其中,x和y为极化协方差矩阵,l为影像视数,|·|代表矩阵行列式。
30、经由上述的技术方案可知,与现有技术相比,本发明提供了一种基于多时相光学和极化雷达遥感影像水稻种植区识别方法,具有以下有益效果:
31、(1)本发明以三江平原为研究区域,提出了基于多时相多源影像的水稻种植区深度学习模型。该模型融合了光学影像中丰富的波段信息和polsar数据中的极化信息进行训练,并考虑到气候条件等因素造成的不同年份水稻生长期的差异性,引入一种迁移机制,以确保模型能应用于不同年份的水稻识别。
32、(2)通过融合多时相多源的遥感影像信息,本发明模型可以有效识别水稻种植区。与传统的监督分类方法和深度卷积神经网络语义分割算法相比,该模型在分类效果体现出明显的优势;并且,该模型也展现了不错的跨年度泛化性能,不仅在训练年份达到了高识别精度,在其他年份也获得了良好的解译结果,且分类图中的水稻种植田呈现连续分布态势,更符合实际情形。
技术特征:
1.基于多时相光学和极化雷达遥感影像水稻种植区识别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于多时相光学和极化雷达遥感影像水稻种植区识别方法,其特征在于,
3.根据权利要求1所述的基于多时相光学和极化雷达遥感影像水稻种植区识别方法,其特征在于,
4.根据权利要求1所述的基于多时相光学和极化雷达遥感影像水稻种植区识别方法,其特征在于,
5.根据权利要求1所述的基于多时相光学和极化雷达遥感影像水稻种植区识别方法,其特征在于,
6.根据权利要求1所述的基于多时相光学和极化雷达遥感影像水稻种植区识别方法,其特征在于,
7.根据权利要求1所述的基于多时相光学和极化雷达遥感影像水稻种植区识别方法,其特征在于,
8.根据权利要求7所述的基于多时相光学和极化雷达遥感影像水稻种植区识别方法,其特征在于,
9.根据权利要求8所述的基于多时相光学和极化雷达遥感影像水稻种植区识别方法,其特征在于,
技术总结
本发明公开了基于多时相光学和极化雷达遥感影像水稻种植区识别方法,涉及农业遥感技术领域。本发明包括:S1.构建数据集、S2.数据预处理、S3.数据划分、S4.模型构建、S5.识别步骤、S6.再获取步骤、S7.模型迁移、S8.再识别步骤。本发明通过融合多时相多源的遥感影像信息,模型可以有效识别水稻种植区,与传统的监督分类方法和深度卷积神经网络语义分割算法相比,该模型在分类效果体现出明显的优势;并且,该模型也展现了不错的跨年度泛化性能,不仅在训练年份达到了高识别精度,在其他年份也获得了良好的解译结果,且分类图中的水稻种植田呈现连续分布态势,更符合实际情形。
技术研发人员:沈银斌,朱圣元,吴迎雷,马晓双
受保护的技术使用者:机械工业勘察设计研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!