基于视频图像分析的电梯门异常检测方法与流程
本申请涉及图像数据处理领域,特别涉及一种基于视频图像分析的电梯门异常检测方法。
背景技术:
1、电梯,主要由曳引机(绞车)、导轨、对重装置、安全装置(如限速器、安全钳和缓冲器等)、信号操纵系统、轿厢与电梯门等组成。这些部分分别安装在建筑物的井道和机房中,通常采用钢丝绳摩擦传动,钢丝绳绕过曳引轮,两端分别连接轿厢和平衡重,电动机驱动曳引轮使轿厢升降。电梯要求安全可靠、输送效率高、平层准确和乘坐舒适等。随着电梯越来越普及于人们的生活,电梯的安全性检测也尤为重要。而因电梯门使用频率极其频繁,电梯门出现故障的概率相对较高,则对电梯门的故障检测尤为重要。
2、目前市面上常见的解决手段,是给电梯装摄像头进行人工地实时监控,但由于摄像头众多、人工监控会有疏忽性等多种因素会导致警情误报或者漏报,导致电梯门异常检测的准确性较低,且异常检测的工作成本较高。
技术实现思路
1、鉴于以上内容,有必要提供一种基于视频图像分析的电梯门异常检测方法,相对于传统的人工检测,进一步提高电梯门异常检测的准确性较,且降低工作成本。
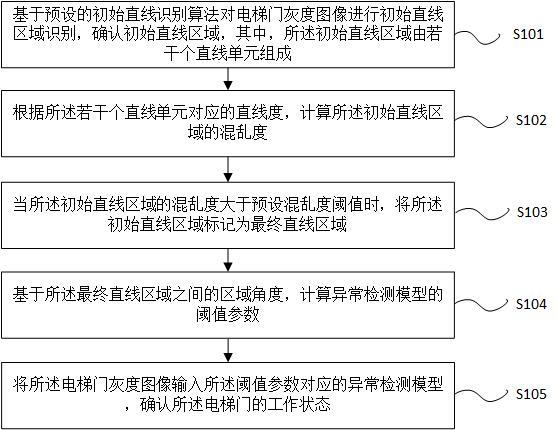
2、本申请第一方面提供一种基于视频图像分析的电梯门异常检测方法,应用于电梯门异常检测领域,所述方法包括:基于预设的初始直线识别算法对电梯门灰度图像进行初始直线区域识别,确认初始直线区域,其中,所述初始直线区域由若干个直线单元组成;根据所述若干个直线单元对应的直线度,计算所述初始直线区域的混乱度;当所述初始直线区域的混乱度大于预设阈值时,将所述初始直线区域标记为最终直线区域;基于所述最终直线区域之间的区域角度,计算异常检测模型的阈值参数;将所述电梯门灰度图像输入所述阈值参数对应的异常检测模型,确认所述电梯门的工作状态。
3、在其中一种实施例中,所述初始直线识别算法是指区域生长算法,对应的,所述基于预设的初始直线识别算法对电梯门灰度图像进行初始直线区域识别,确认初始直线区域,其中,所述初始直线区域由若干个直线单元组成,具体包括:在所述电梯门灰度图像中选定初始目标像素作为种子点,将所述种子点的邻域窗口内的像素点灰度值与所述种子点的灰度值的差值与生长阈值比对;当所述种子点的邻域窗口内的像素点与所述种子点的灰度值的差值小于或等于生长阈值时,将该像素点归为直线像素点;当所述种子点的邻域窗口内的像素点与所述种子点的灰度值的差值大于生长阈值时,将该像素点归为其他像素点;基于所述直线像素点,确认初始直线区域。
4、在其中一种实施例中,所述在所述根据所述若干个直线单元对应的相似度,计算所述初始直线区域的混乱度之前,所述方法还包括:将所述初始直线区域进行等面积的矩形区域划分,确认若干个相同面积矩形的直线单元。
5、在其中一种实施例中,所述根据所述若干个直线单元对应的直线度,计算所述初始直线区域的混乱度,具体包括:基于所述若干个直线单元中像素点的位置坐标,计算所述若干个直线单元对应的直线系数;将所述直线单元的像素个数、区域面积以及直线系数作为计算参数,计算若干个直线单元对应的直线度;根据预设的相似度对应关系表,将所述若干个直线单元对应的直线度转换成对应的相似度;基于所述若干个直线单元对应的相似度,计算所述初始直线区域的混乱度。
6、在其中一种实施例中,所述基于所述若干个直线单元中像素点的位置坐标,计算所述若干个直线单元对应的直线系数,具体包括:
7、
8、其中,所述为第个直线单元的直线系数,为第q个直线单元内第j个像素点x轴的坐标值,为第q个直线单元内第j个像素点y轴的坐标值,为第q个直线单元内所有像素点x轴坐标的平均值,为第q个直线单元内所有像素点y轴坐标的平均值,是第q个直线单元内所有像素点x轴方向上的标准差,是第q个直线单元内所有像素点y轴方向上的标准差,n为第q个直线单元的像素点个数。
9、在其中一种实施例中,所述将所述直线单元的像素个数、区域面积以及直线系数作为计算参数,计算若干个直线单元对应的直线度,具体包括:
10、
11、其中,所述为第个直线单元的直线度,为第个直线单元的直线像素点个数,为该区域的长度,为该区域的宽度,为第个直线单元的面积,为第个直线单元的直线系数绝对值。
12、在其中一种实施例中,所述基于所述若干个直线单元对应的相似度,计算所述初始直线区域的混乱度,具体包括:统计每个相似度对应的直线单元个数,将所述每个相似度对应的直线单元个与直线单元的总个数作比值计算,确认每个相似度对应的相似度概率;基于所述每个相似度对应的相似度概率,计算所述初始直线区域的混乱度。
13、在其中一种实施例中,所述基于所述每个相似度对应的相似度概率,计算所述初始直线区域的混乱度,具体包括:
14、
15、其中,所述为初始直线区域的混乱度,为第个相似度对应的相似度概率,为初始直线区域的直线单元总个数。
16、在其中一种实施例中,所述基于所述最终直线区域之间的区域角度,计算异常检测模型的阈值参数,具体包括:
17、将所述最终直线区域之间的区域角度进行排序,确认最大区域角度;将所述最大区域角度输入阈值参数计算公式,计算所述异常检测模型的阈值参数;对应的,所述阈值参数计算公式为:
18、
19、其中,为所述异常检测模型的阈值参数,为最大区域角度。
20、在其中一种实施例中,在所述当所述初始直线区域的混乱度大于预设阈值时,将所述初始直线区域标记为最终直线区域之后,且将所述电梯门灰度图像输入所述阈值参数对应的异常检测模型,确认所述电梯门的工作状态之前,所述方法还包括:基于所述最终直线区域的斜率确认互为直角对应的最终直线区域;将互为直角对应的最终直线区域进行构建,确认初始电梯门框架图;当所述初始电梯门框架存在线段缺失时,以基于所述初始电梯门框架中最终直线区域的斜率与像素坐标值进行还原,确认最终电梯门框架图。
21、本申请实施例通过基于预设的初始直线识别算法对电梯门灰度图像进行初始直线区域识别,确认初始直线区域,其中,所述初始直线区域由若干个直线单元组成,然后根据所述若干个直线单元对应的直线度,计算所述初始直线区域的混乱度,而当所述初始直线区域的混乱度大于预设阈值时,将所述初始直线区域标记为最终直线区域,再基于所述最终直线区域之间的区域角度,计算异常检测模型的阈值参数,最后将所述电梯门灰度图像输入所述阈值参数对应的异常检测模型,确认所述电梯门的工作状态。通过对电梯门的电梯门灰度图像进行实时数据分析,以确认异常检测模型的阈值参数,再基于异常检测模型对电梯门进行异常检测,提高检测准确性,降低检测工作成本。
技术特征:
1.基于视频图像分析的电梯门异常检测方法,应用于电梯门异常检测领域,其特征在于,所述方法包括:
2.根据权利要求1所述的基于视频图像分析的电梯门异常检测方法,其特征在于,所述初始直线识别算法是指区域生长算法,对应的,所述基于预设的初始直线识别算法对电梯门灰度图像进行初始直线区域识别,确认初始直线区域,其中,所述初始直线区域由若干个直线单元组成,具体包括:
3.根据权利要求1所述的基于视频图像分析的电梯门异常检测方法,其特征在于,在所述根据所述若干个直线单元对应的相似度,计算所述初始直线区域的混乱度之前,所述方法还包括:
4.根据权利要求1所述的基于视频图像分析的电梯门异常检测方法,其特征在于,所述根据所述若干个直线单元对应的直线度,计算所述初始直线区域的混乱度,具体包括:
5.根据权利要求4所述的基于视频图像分析的电梯门异常检测方法,其特征在于,所述基于所述若干个直线单元中像素点的位置坐标,计算所述若干个直线单元对应的直线系数,具体包括:
6.根据权利要求5所述的基于视频图像分析的电梯门异常检测方法,其特征在于,所述将所述直线单元的直线像素点个数、区域面积以及直线系数作为计算参数,计算若干个直线单元对应的直线度,具体包括:
7.根据权利要求6所述的基于视频图像分析的电梯门异常检测方法,其特征在于,所述基于所述若干个直线单元对应的相似度,计算所述初始直线区域的混乱度,具体包括:
8.根据权利要求7所述的基于视频图像分析的电梯门异常检测方法,其特征在于,所述基于所述每个相似度对应的相似度概率,计算所述初始直线区域的混乱度,具体包括:
9.根据权利要求8所述的基于视频图像分析的电梯门异常检测方法,其特征在于,所述基于所述最终直线区域之间的区域角度,计算异常检测模型的阈值参数,具体包括:
10.根据权利要求9所述的基于视频图像分析的电梯门异常检测方法,其特征在于,在所述当所述初始直线区域的混乱度大于预设阈值时,将所述初始直线区域标记为最终直线区域之后,且将所述电梯门灰度图像输入所述阈值参数对应的异常检测模型,确认所述电梯门的工作状态之前,所述方法还包括:
技术总结
本申请涉及图像数据处理领域,特别涉及基于视频图像分析的电梯门异常检测方法,包括:对电梯门灰度图像进行初始直线区域识别,确认初始直线区域,初始直线区域由若干个直线单元组成,然后根据若干个直线单元对应的直线度,计算初始直线区域的混乱度,而当初始直线区域的混乱度大于预设阈值时,将初始直线区域标记为最终直线区域,再基于最终直线区域之间的区域角度,计算异常检测模型的阈值参数,最后将电梯门灰度图像输入所述阈值参数对应的异常检测模型,确认电梯门的工作状态。通过对电梯门的电梯门灰度图像进行实时数据分析,以确认异常检测模型的阈值参数,基于异常检测模型对电梯门进行异常检测,提高检测准确性,降低检测工作成本。
技术研发人员:胡令真,田家鹏,党晓飞,徐恩同,周在宾,王义德
受保护的技术使用者:凯尔菱电(山东)电梯有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!