基于时空轨迹数据的目标伴随模式挖掘方法
背景技术:
1、通常数据资源池的人、车、畜、船等各种目标的时空轨迹数据可以分析不同目标的时空轨迹变化规律,从这些海量的时空轨迹数据中发现隐藏的知识和轨迹模式,分析得到各种对象之间的伴生规律。而挖掘伴随模式是一种有效的分析时空轨迹模式的方法,即挖掘一起运动的超过设定时间长度阈值的移动目标群体。时空轨迹伴随模式是时空数据轨迹模式中重要的组成部分,其在挖掘具有相同或相似运动模式的移动对象群体等方面有着广泛的应用。
2、但是,伴随模式在第一步寻找空间距离相近的目标时,需要计算每个目标间的距离,在大规模数据集下同一时刻存在大量目标,因此这个过程将产生巨大的计算量。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种基于时空轨迹数据的目标伴随模式挖掘方法,解决在大规模数据集下和同一时刻存在大量目标,进而产生巨大的计算量的技术问题
2、为达到上述目的/为解决上述技术问题,本发明是采用下述技术方案实现的:
3、第一方面,本发明提供了一种基于时空轨迹数据的目标伴随模式挖掘方法,包括:
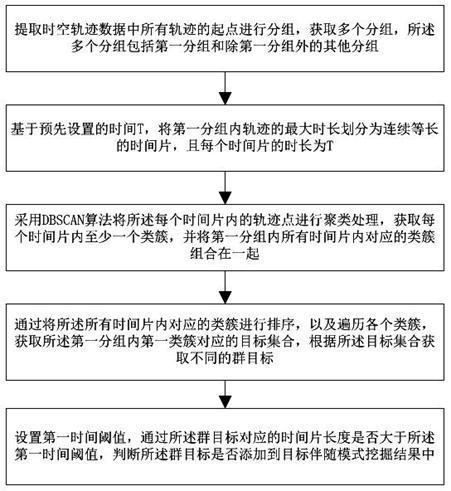
4、提取时空轨迹数据中所有轨迹的起点进行分组,获取多个分组,所述多个分组包括第一分组和除第一分组外的其它分组;
5、基于预先设置的时间t,将第一分组内轨迹的最大时长划分为连续等长的时间片,且每个时间片的时长为t;
6、采用dbscan算法将所述每个时间片内的轨迹点进行聚类处理,获取每个时间片内至少一个类簇,并将所有时间片内对应的类簇组合在一起;
7、通过将所述所有时间片内对应的类簇进行排序,以及遍历各个类簇,获取所述第一分组内第一类簇对应的目标集合,根据所述目标集合获取不同的群目标,
8、设置第一时间阈值,通过所述群目标对应的时间片长度是否大于所述第一时间阈值,判断所述群目标是否添加到目标伴随模式挖掘结果中。
9、结合第一方面,进一步地,所述时空轨迹数据中所有轨迹的起点分组过程包括:
10、遍历起点集合中的每一个点p,计算所述点p的eps值,以及点p的eps邻域半径内包含的点的数量;
11、设置最小数目成群阈值minpts,根据所述点p的eps邻域半径内包含的点的数量与小数目成群阈值minpts比较,判断所述点p的类型。
12、结合第一方面,进一步地,所述点p的eps值计算公式如下:
13、eps=(δt-η)*v
14、其中,δt为起点为点p的轨迹跨越时间;η为预先设置的时间阈值,v为点p的轨迹所属目标的最大速度。
15、结合第一方面,进一步地,述点p的eps邻域半径内包含的点的数量计算过程包括:
16、遍历所述起点集合中除点p外的每一个其它点p',计算以点p为起点的轨迹与以点p'为起点的轨迹之间的分组距离,所述表达式如下:
17、dist=eps(p)+(δt-η)*v'=(δt-η)*(v+v')
18、其中,v'为以点p'为起点的轨迹所属目标的最大速度;dist为分组距离。
19、设置分组距离阈值,根据所述计算得出的分组距离,判断分组距离是否小于预先设置的分组距离阈值,若分组距离小于预先设置的分组距离阈值,则点p'在点p的eps邻域半径之内;若分组距离大于预先设置的分组距离阈值,则点p'没有落在点p的eps邻域半径之内;
20、遍历完毕所述起点集合中除点p外的每一个其它点p',并统计所述在点p的eps邻域半径之内的所有点的数量。
21、结合第一方面,进一步地所述统计的点p的eps邻域半径之内的所有点的数量是否大于小数目成群阈值minpts判断点p类型的过程如下:
22、若点p的eps邻域半径内包含的点的数量小于最小数目成群阈值minpts,则点p为噪声点;若点p的eps邻域半径内包含的点的数量不小于最小数目成群阈值minpts,则点p为核心点,并创建一个以点p为核心点的聚类簇。
23、结合第一方面,进一步地,所述创建一个以点p为核心点的聚类簇的过程如下:
24、将点p加入到所述聚类簇中,以及遍历所述点p的eps邻域半径内每个点p',判断p'是否为核心点,若p'的eps邻域半径内点的数量大于或等于最小成群阈值minpts,则将点p'的eps邻域与点p的eps邻域合并,不断更新形成新的聚类簇。
25、结合第一方面,进一步地,所述添加到伴随模式挖掘结果中的过程如下:
26、遍历所述同一分组内的每一条轨迹,确定所述每一条轨迹上轨迹点所属的类簇,以及确定各个类簇对应的目标数量,根据所述目标数量按从大到小的顺序进行排列,基于所述目标数量的排序,依次遍历各个类簇,获取所述第一分组内第一类簇对应的目标集合;
27、将所述目标集合中的任意数量的目标进行随机组合,获取不同的群目标,根据预先设置的第一时间阈值,判断群目标对应的时间片长度是否大于第一时间阈值,若群目标对应的时间片长度不小于第一时间阈值,则将所述群目标添加到目标伴随模式挖掘结果中,若群目标对应的时间片长度小于第一时间阈值,则删除所述群目标。
28、第二方面,本发明提供了一种基于时空轨迹数据的目标伴随模式挖掘设备,包括:
29、处理器及存储介质;
30、所述处理器用于根据所述指令进行操作以执行前述任一项所述方法的步骤。
31、第三方面,本发明提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现前述任一项所述方法的步骤。
32、与现有技术相比,本发明所达到的有益效果:
33、根据时空轨迹数据将所有轨迹的起点划分为第一分组和除了第一分组外的其它分组,本发明仅仅对第一分组内的轨迹进行处理,其它分组内的轨迹与第一分组处理方式相同。首先通过在同一时间片上进行聚类操作,获得同一时间片上的多个类簇,进而将所有时间片上对应得类簇组合在一起,达到轨迹点聚类的效果;然后通过在不同时间片上挖掘群目标,将群目标添加到目标伴随模式挖掘结果中,这样基于时空轨迹数据的目标伴随方法以及基于聚类操作的轨迹分组,能够大幅度提高计算速度和效率。
技术特征:
1.一种基于时空轨迹数据的目标伴随模式挖掘方法,其特征在于,包括:
2.根据权利要求1所述的基于时空轨迹数据的目标伴随模式挖掘方法,其特征在于,所述时空轨迹数据中所有轨迹的起点分组过程包括:
3.根据权利要求2所述的基于时空轨迹数据的目标伴随模式挖掘方法,其特征在于,所述点p的eps值计算公式如下:
4.根据权利要求2所述的基于时空轨迹数据的目标伴随模式挖掘方法,其特征在于,所述点p的eps邻域半径内包含的点的数量计算过程包括:
5.根据权利要求4所述的基于时空轨迹数据的目标伴随模式挖掘方法,其特征在于,所述统计的点p的eps邻域半径之内的所有点的数量是否大于最小数目成群阈值minpts判断点p类型的过程如下:
6.根据权利要求5所述的基于时空轨迹数据的目标伴随模式挖掘方法,其特征在于,所述创建一个以点p为核心点的聚类簇的过程如下:
7.根据权利要求1所述的基于时空轨迹数据的目标伴随模式挖掘方法,其特征在于,所述添加到目标伴随模式挖掘结果中的过程如下:
8.一种基于时空轨迹数据的目标伴随模式挖掘设备,其特征在于,包括处理器及存储介质;
9.计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1~7任一项所述方法的步骤。
技术总结
本发明公开了时空轨迹数据挖掘邻域的一种基于时空轨迹数据的目标伴随模式挖掘方法,旨在解决DBSCAN算法运行效率低的技术问题。其包括:提取时空轨迹数据中所有轨迹点进行分组,将第一分组内轨迹的最大时长划分为连续等长的时间片,采用DBSCAN算法将所述每个时间片内的轨迹的起点进行聚类处理,获取每个时间片内至少一个类簇,并将所有时间片内对应的类簇组合在一起;通过将所有时间片内对应的第一类簇进行排序,以及遍历各个类簇,获取类簇对应的目标集合,根据所述目标集合获取不同的群目标,通过群目标对应的时间长度判断是否添加到伴随模式挖掘结果中。本发明能够根据分组结果提取起点对应的轨迹,后续的挖掘工作也能在同组内的轨迹中独立进行。
技术研发人员:王睿,王真,张文宇,陈涵
受保护的技术使用者:中国人民解放军陆军工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!