扫描点云配准方法、系统、设备及存储介质与流程
本发明涉及点云配准,尤其涉及一种扫描点云配准方法、系统、设备及存储介质。
背景技术:
1、在零件进行点云配准时,传统最近点迭代算法(iterative closest point icp)为常用的点云精配准算法。该算法能够取得较高的配准精度,但在对应点匹配过程中需要遍历标准模型所有点寻找最近点,使得算法计算复杂度较高。其次,以点到点间欧氏距离作为对应点匹配标准误差较大,易导致对应点误匹配。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供了一种扫描点云配准方法、系统、设备及存储介质,旨在解决如何实现扫描点云与标准模型的精配准的技术问题。
2、为实现上述目的,本发明提供了一种扫描点云配准方法,所述扫描点云配准方法包括:
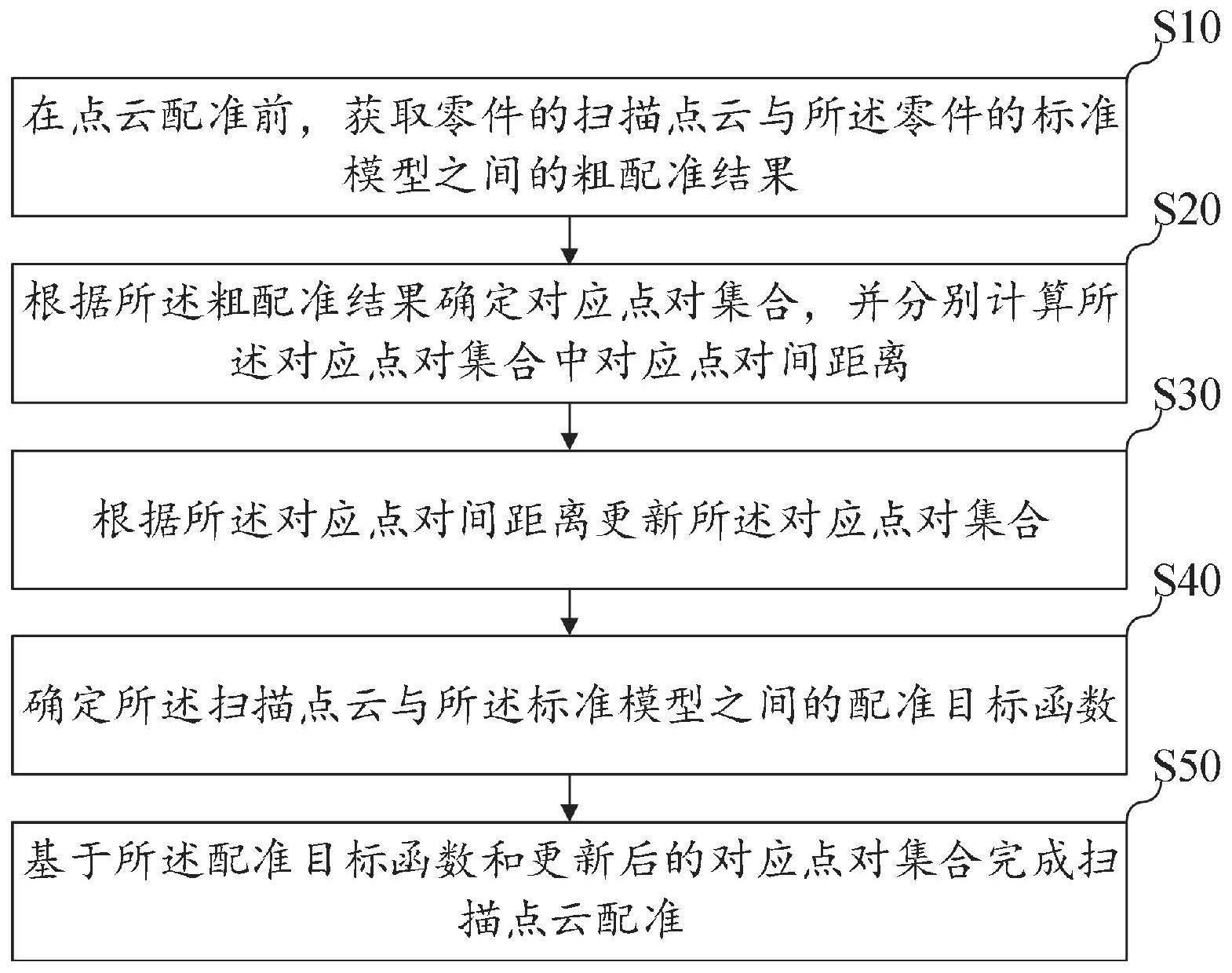
3、在点云配准前,获取零件的扫描点云与所述零件的标准模型之间的粗配准结果;
4、根据所述粗配准结果确定对应点对集合,并分别计算所述对应点对集合中对应点对间距离;
5、根据所述对应点对间距离更新所述对应点对集合;
6、确定所述扫描点云与所述标准模型之间的配准目标函数;
7、基于所述配准目标函数和更新后的对应点对集合完成扫描点云配准。
8、可选地,所述在点云配准前,获取零件的扫描点云与所述零件的标准模型之间的粗配准结果的步骤,包括:
9、在点云配准前,根据零件的扫描点云与所述零件的标准模型构建点云kd-tree结构;
10、基于所述点云kd-tree结构获取所述扫描点云与所述标准模型之间的粗配准结果。
11、可选地,所述根据所述对应点对间距离更新所述对应点对集合的步骤,包括:
12、根据所述对应点对间距离和预设距离阈值选取误匹配点对;
13、对所述误匹配点对进行权重归零处理,获得处理后的误匹配点对;
14、根据所述处理后的误匹配点对更新所述对应点对集合。
15、可选地,所述基于所述配准目标函数和更新后的对应点对集合完成扫描点云配准的步骤,包括:
16、根据所述配准目标函数和更新后的对应点对集合通过奇异值分解法得到旋转变换矩阵和平移变换矩阵;
17、在所述旋转变换矩阵和所述平移变换矩阵满足预设变换矩阵收敛条件时,完成扫描点云配准。
18、可选地,所述在所述旋转变换矩阵和所述平移变换矩阵满足预设变换矩阵收敛条件时,完成扫描点云配准的步骤之前,还包括:
19、根据所述旋转变换矩阵通过轴角表示法确定扫描点云旋转角度,并根据所述平移变换矩阵确定扫描点云平移距离;
20、判断所述扫描点云旋转角度是否大于预设角度阈值,且所述扫描点云平移距离是否小于预设距离阈值;
21、若是,则判定所述旋转变换矩阵和所述平移变换矩阵满足预设变换矩阵收敛条件。
22、可选地,所述基于所述配准目标函数和更新后的对应点对集合完成扫描点云配准的步骤,还包括:
23、根据所述配准目标函数和更新后的对应点对集合确定迭代目标函数值;
24、判断所述迭代目标函数值是否小于预设误差函数阈值;
25、在所述迭代目标函数值小于所述预设误差函数阈值时,完成扫描点云配准。
26、可选地,所述基于所述配准目标函数和更新后的对应点对集合完成扫描点云配准的步骤,还包括:
27、根据所述配准目标函数和更新后的对应点对集合确定迭代次数;
28、在所述迭代次数等于预设最大迭代次数时,完成扫描点云配准。
29、此外,为实现上述目的,本发明还提出一种扫描点云配准系统,所述扫描点云配准系统包括:
30、匹配模块,用于在点云配准前,获取零件的扫描点云与所述零件的标准模型之间的粗配准结果;
31、计算模块,用于根据所述粗配准结果确定对应点对集合,并分别计算所述对应点对集合中对应点对间距离;
32、更新模块,用于根据所述对应点对间距离更新所述对应点对集合;
33、确定模块,用于确定所述扫描点云与所述标准模型之间的配准目标函数;
34、配准模块,用于基于所述配准目标函数和更新后的对应点对集合完成扫描点云配准。
35、此外,为实现上述目的,本发明还提出一种扫描点云配准设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的扫描点云配准程序,所述扫描点云配准程序配置为实现如上文所述的扫描点云配准方法的步骤。
36、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有扫描点云配准程序,所述扫描点云配准程序被处理器执行时实现如上文所述的扫描点云配准方法的步骤。
37、本发明在点云配准前,首先获取零件的扫描点云与所述零件的标准模型之间的粗配准结果,然后根据粗配准结果确定对应点对集合,并分别计算对应点对集合中对应点对间距离,之后根据对应点对间距离更新对应点对集合;确定扫描点云与标准模型之间的配准目标函数,最后基于配准目标函数和更新后的对应点对集合完成扫描点云配准。相较于现有技术中最近点迭代算法icp以点到点间欧氏距离作为对应点匹配标准误差较大,易导致对应点误匹配,而本发明通过更新对应点对集合,之后基于配准目标函数和更新后的对应点对集合完成扫描点云配准,从而实现了扫描点云与标准模型的精配准。
技术特征:
1.一种扫描点云配准方法,其特征在于,所述扫描点云配准方法包括以下步骤:
2.如权利要求1所述的方法,其特征在于,所述在点云配准前,获取零件的扫描点云与所述零件的标准模型之间的粗配准结果的步骤,包括:
3.如权利要求1所述的方法,其特征在于,所述根据所述对应点对间距离更新所述对应点对集合的步骤,包括:
4.如权利要求1-3任一项所述的方法,其特征在于,所述基于所述配准目标函数和更新后的对应点对集合完成扫描点云配准的步骤,包括:
5.如权利要求4所述的方法,其特征在于,所述在所述旋转变换矩阵和所述平移变换矩阵满足预设变换矩阵收敛条件时,完成扫描点云配准的步骤之前,还包括:
6.如权利要求1-3任一项所述的方法,其特征在于,所述基于所述配准目标函数和更新后的对应点对集合完成扫描点云配准的步骤,还包括:
7.如权利要求1-3任一项所述的方法,其特征在于,所述基于所述配准目标函数和更新后的对应点对集合完成扫描点云配准的步骤,还包括:
8.一种扫描点云配准系统,其特征在于,所述扫描点云配准系统包括:
9.一种扫描点云配准设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的扫描点云配准程序,所述扫描点云配准程序配置为实现如权利要求1至7中任一项所述的扫描点云配准方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有扫描点云配准程序,所述扫描点云配准程序被处理器执行时实现如权利要求1至7任一项所述的扫描点云配准方法的步骤。
技术总结
本发明公开了一种扫描点云配准方法、系统、设备及存储介质,所述方法包括:在点云配准前,获取零件的扫描点云与所述零件的标准模型之间的粗配准结果;根据粗配准结果确定对应点对集合,并分别计算对应点对集合中对应点对间距离;根据对应点对间距离更新对应点对集合;确定扫描点云与标准模型之间的配准目标函数;基于配准目标函数和更新后的对应点对集合完成扫描点云配准。相较于现有技术中最近点迭代算法ICP以点到点间欧氏距离作为对应点匹配标准误差较大,易导致对应点误匹配,而本发明通过更新对应点对集合,之后基于配准目标函数和更新后的对应点对集合完成扫描点云配准,从而实现了扫描点云与标准模型的精配准。
技术研发人员:熊烁,王昌杰,唐小琦,刘雄,李君,陈天航,唐沛然,周向东,宋宝
受保护的技术使用者:武汉久同智能科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!