一种基于点云配准的缺陷检测方法、装置以及设备与流程
本发明涉及锂电池,尤其涉及一种基于点云配准的缺陷检测方法、装置以及设备。
背景技术:
1、质检是工业产品生产中的重要一环,确保产品安全,质量合格是企业发展的重中之重。现有的产品质检方式主要由人工质检和自动化检测两种,人工质检方式存在质检人员培养周期长,且主观性强,缺少直观可靠的数据来检验产品,检测规格多变,难以确保产品检测标准化,符合产品需求。而自动化检测可以极大节省企业成本,检测效果稳定可靠,并可以为企业提供准确的产品数据,为企业优化产品生产工艺提供参考。但目前工业生产偏向多种类、小批量生产,产品更新换代快,自动化检测方案却需要专业人员开发,开发周期长,开发成本高,难以满足快速更新的生产需求。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种基于点云配准的缺陷检测方法、装置以及设备,旨在解决上述问题。
2、为实现上述目的,本发明提供一种基于点云配准的缺陷检测方法,所述方法包括:
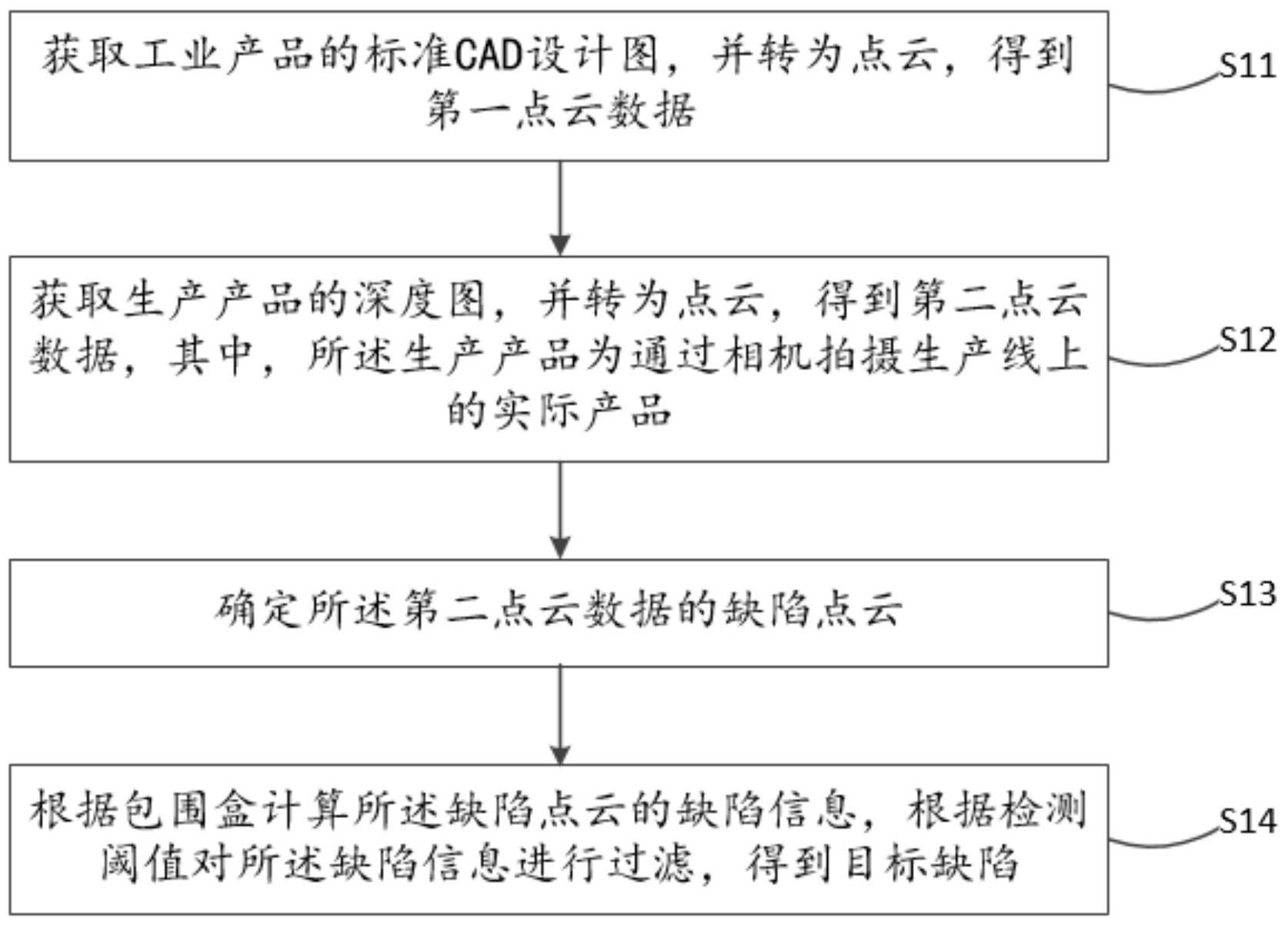
3、获取工业产品的标准cad设计图,并转为点云,得到第一点云数据;
4、获取生产产品的深度图,并转为点云,得到第二点云数据,其中,所述生产产品为通过相机拍摄生产线上的实际产品;
5、确定所述第二点云数据的缺陷点云;
6、根据包围盒计算所述缺陷点云的缺陷信息,根据检测阈值对所述缺陷信息进行过滤,得到目标缺陷。
7、优选的,所述确定所述第二点云数据的缺陷点云,包括:
8、计算所述第二点云数据的质心,基于所述第二点云数据的质心将所述第一点云数据进行平移变换,得到第一变换数据;
9、将所述第一变换数据与所述第二点云数据进行配准,得到第三点云数据;
10、基于预设双向距离配准法将所述第三点云数据与所述第二点云数据进行二次匹配,得到匹配点云数据;
11、利用最邻近搜索法,通过遍历所述第二点云数据中的每一点在所述匹配点云数据中查找邻近点,并计算两点之间的距离,当距离大于距离阈值时,则将对应的点作为所述缺陷点云。
12、优选的,所述将所述第一变换数据与所述第二点云数据进行配准,得到第三点云数据,包括:
13、分别计算所述第一变换数据以及所述第二点云数据中每一点的曲率值;
14、判断所述曲率值大于曲率阈值时,将所述曲率值所对应的点作为强曲率点,否则作为弱曲率点,并根据所述强曲率点以及所述弱曲率点确定对应的强曲率特征区域以及弱曲率特征区域;
15、确定所述强曲率特征区域以及所述弱曲率特征区域的特征信息,根据所述特征信息在所述第二点云数据中查找对应所述第一变换数据的配对区域;
16、基于所述配对区域,对所述第一变换数据进行旋转平移后,得到第二变换数据;
17、计算所述第二变换数据中每一点与所述第二点云数据中的邻近点的距离误差,若所述距离误差小于误差阈值时,将所述第二变换数据作为所述第三点云数据。
18、优选的,所述根据所述强曲率点确定强曲率特征区域,包括:
19、根据分割阈值对所述强曲率点进行分割,将相邻距离小于所述分割阈值的所述强曲率点作为所述强曲率特征区域。
20、优选的,所述特征信息包括所述强曲率点的点数、质心、曲率平均值;所述根据所述特征信息在所述第二点云数据中查找对应所述第一变换数据的配对区域,包括:
21、基于所述第一变换数据的所述强曲率特征区域以及所述弱曲率特征区域,在所述第二点云数据中查找待匹配区域,当所述待匹配区域满足匹配条件时,将所述待匹配区域作为所述配对区域;其中,所述匹配条件包括所述质心的距离小于质心阈值、所述点数小于点数阈值以及所述曲率平均值差小于配准曲率阈值。
22、优选的,所述基于预设双向距离配准法将所述第三点云数据与所述第二点云数据进行二次匹配,得到匹配点云数据,包括:
23、通过遍历所述第二点云数据的每一点在所述第三点云数据中查找邻近点,得到第一预选配对点;
24、通过遍历所述第三点云数据的每一点在所述第二点云数据中查找邻近点,得到第二预选配对点;
25、判断所述第一预选配对点与所述第二预选配对点是否对应相同,若是,则保留所述第一预选配对点并作为目标配对点;
26、基于所述目标配对点,计算所述第二点云数据和所述第三点云数据的旋转平移变换矩阵,得到第三变换数据;
27、计算所述第三变换数据中每一点与所述第二点云数据中的邻近点的距离误差之和,若所述距离误差之和小于加和阈值时,将所述第三变化数据作为所述匹配点云数据。
28、为实现上述目的,本发明还提供一种基于点云配准的缺陷检测装置,所述装置包括:
29、第一获取单元,用于获取工业产品的标准cad设计图,并转为点云,得到第一点云数据;
30、第二获取单元,用于获取生产产品的深度图,并转为点云,得到第二点云数据,其中,所述生产产品为通过相机拍摄生产线上的实际产品;
31、确定单元,用于确定所述第二点云数据的缺陷点云;
32、检测单元,用于根据包围盒计算所述缺陷点云的缺陷信息,根据检测阈值对所述缺陷信息进行过滤,得到目标缺陷。
33、为了实现上述目的,本发明还提出一种基于点云配准的缺陷检测设备,包括处理器、存储器以及存储在所述存储器内的计算机程序,所述计算机程序被所述处理器执行以实现如上述实施例所述的一种基于点云配准的缺陷检测方法的步骤。
34、为了实现上述目的,本发明还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行以实现如上述实施例所述的一种基于点云配准的缺陷检测方法的步骤。
35、有益效果:
36、以上方案,通过基于点云配准的缺陷检测方法能够实现快速检测出小批量、多种类的工业产品缺陷,更好地满足产品快速更新换代的生产需求,实现自动化精细检测的目标。
37、以上方案,通过采用不同的点云配准方式进行配准检测,相比起传统的icp配准,以曲率区域配准和双向距离配准的方法,可以快速筛选出符合要求的配对点,剔除掉错误的配对点,极大地减少了算法计算量,减少算法耗时,为计算旋转平移变换矩阵提供良好的配对数据,降低配准误差。
38、以上方案,通过采用基于强弱曲率特征区域配准或双向距离配准,都可以在一定程度上避免噪声的干扰,提供更精细的匹配结果,提高检测精度,保证了产品的生产质量。
技术特征:
1.一种基于点云配准的缺陷检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种基于点云配准的缺陷检测方法,其特征在于,所述将所述第一变换数据与所述第二点云数据进行配准,得到第三点云数据,包括:
3.根据权利要求2所述的一种基于点云配准的缺陷检测方法,其特征在于,所述根据所述强曲率点确定强曲率特征区域,包括:
4.根据权利要求2所述的一种基于点云配准的缺陷检测方法,其特征在于,所述特征信息包括所述强曲率点的点数、质心、曲率平均值;所述根据所述特征信息在所述第二点云数据中查找对应所述第一变换数据的配对区域,包括:
5.根据权利要求1所述的一种基于点云配准的缺陷检测方法,其特征在于,所述基于预设双向距离配准法将所述第三点云数据与所述第二点云数据进行二次匹配,得到匹配点云数据,包括:
6.一种基于点云配准的缺陷检测装置,其特征在于,所述装置包括:
7.一种基于点云配准的缺陷检测设备,其特征在于,包括处理器、存储器以及存储在所述存储器内的计算机程序,所述计算机程序被所述处理器执行以实现如权利要求1至5任意一项所述的一种基于点云配准的缺陷检测方法的步骤。
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行以实现如权利要求1至5任意一项所述的一种基于点云配准的缺陷检测方法的步骤。
技术总结
本发明公开了一种基于点云配准的缺陷检测方法、装置、设备及存储介质,其包括:获取工业产品的标准CAD设计图,并转为点云,得到第一点云数据;获取生产产品的深度图,并转为点云,得到第二点云数据,其中,所述生产产品为通过相机拍摄生产线上的实际产品;确定所述第二点云数据的缺陷点云;根据包围盒计算所述缺陷点云的缺陷信息,根据检测阈值对所述缺陷信息进行过滤,得到目标缺陷。能够实现快速检测出小批量、多种类的工业产品缺陷,更好地满足产品快速更新换代的生产需求,实现自动化精细检测的目标。
技术研发人员:陈宇,黄泽麟,何俊霖
受保护的技术使用者:厦门微图软件科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!