一种检测模型构建方法、检测方法、机器人和存储介质与流程
本发明涉及移动机器人,具体涉及一种机器人感知室内路面积水的检测模型构建方法、检测方法、机器人和存储介质。
背景技术:
1、在商场或者写字楼,自来水管和水龙头很常见。如果有人忘关水龙头,又或者施工不小心造成水管破裂漏水,在下班无人时,未及时发现,形成积水流淌,会浸泡地板和其它堆放在地面的商品等,可能造成严重财产损失。为了监测类似的明显积水场景,及时发出预警,减少损失,室内积水检测的方法很有必要。
2、现今通常采用机器人进行检测,现有的积水检测方法主要针对室外道路坑洼路面积水,使用视觉特征区分正常路面与积水覆盖路面,这种方法并不适用于室内积水检测,不仅仅是因为室内积水并没有明显坑洼,积水分布与室外场景不同,主要还因为室内积水大多是较干净透明的清水,积水区域与地板区域视觉特征不明显,室内积水检测主要针对下班后,即多是发生在没有光照的夜晚,采用红外图像等进行分析的检测结果准确度低。
3、鉴于此,需要一种不基于图像的、能够使机器人准确感知室内路面积水的检测模型构建方法、检测方法、机器人和计算机存储介质。
技术实现思路
1、鉴于上述问题,本发明提供一种检测模型构建方法、检测方法、机器人和计算机存储介质。
2、本发明为解决技术问题所采用的技术方案如下:
3、第一方面,本发明提供一种机器人感知室内路面积水的检测模型构建方法,包括:
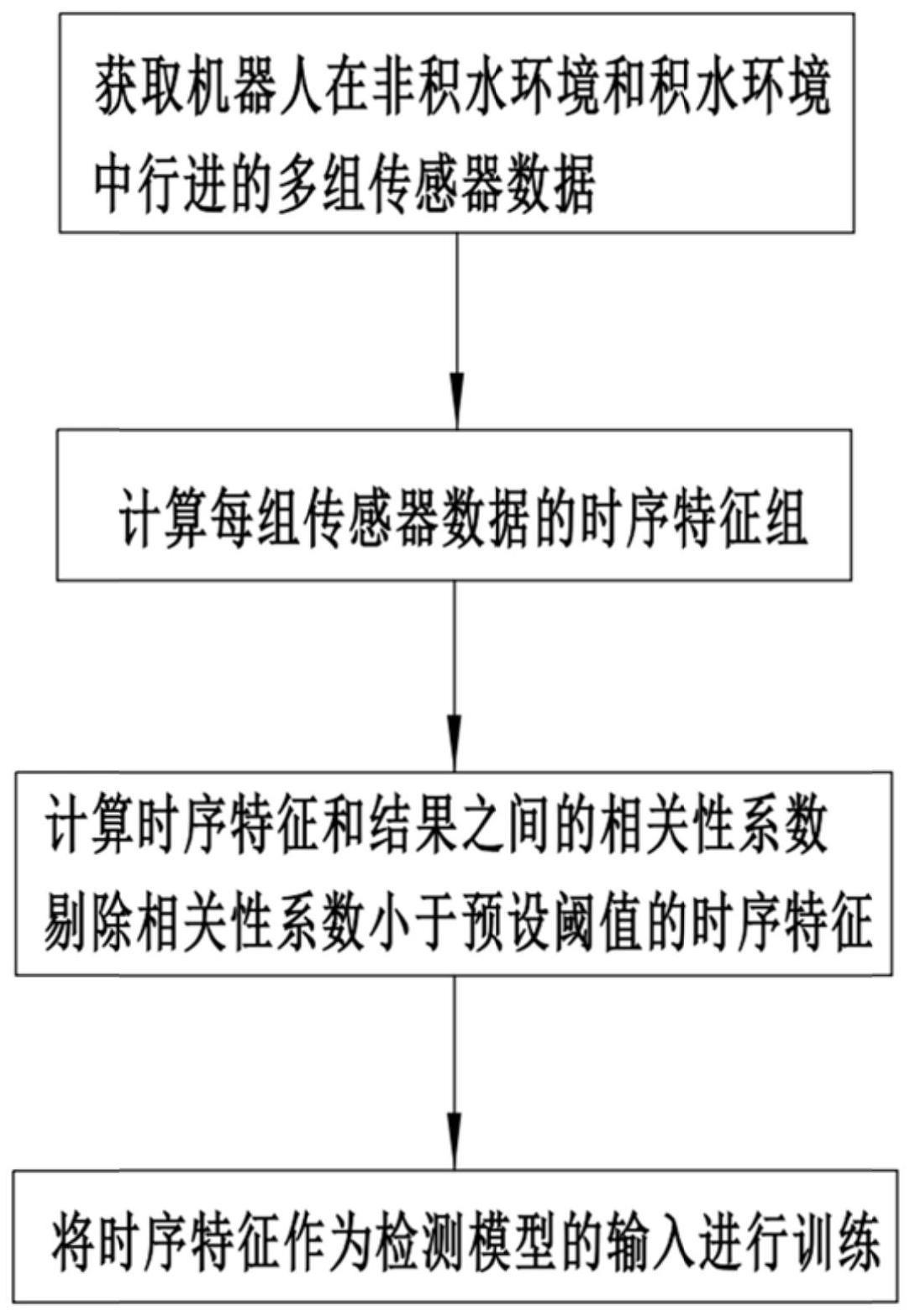
4、获取机器人在非积水环境和积水环境中行进的多组传感器数据;
5、计算每组传感器数据的时序特征组;
6、采用决策树模型计算所述时序特征组中每一项特征和该时序特征组对应的结果之间的相关性系数,剔除相关性系数小于预设阈值的时序特征,所述结果分为机器人所在路面为非积水环境和机器人所在路面为积水环境两种;
7、将保留的时序特征作为检测模型的输入,训练检测模型。
8、在一个优选的实施例中,多组所述传感器数据至少包括19组传感数据,19组所述传感数据分别为机器人x方向线速度、机器人y方向线速度、机器人z方向线速度、机器人x方向角速度、机器人y方向角速度、机器人z方向角速度、机器人x方向加速度、机器人y方向加速度、机器人z方向加速度、机器人x方向角度、机器人y方向角度、机器人z方向角度、左轮毂电机的编码速度、右轮毂电机的编码速度、左轮毂电机的实际速度、右轮毂电机的实际速度、左轮毂电机的移动距离、右轮毂电机的移动距离、机器人的移动距离。
9、在一个优选的实施例中,所述计算每组传感器数据的时序特征组的具体为:取每组传感器数据中某段时间或者某一时间长度的传感器数据,将所述某段时间或者某一时间长度的传感器数据代表该组传感器数据进行时序特征提取,得到时序特征组。
10、在一个优选的实施例中,所述时序特征组包括一阶差分绝对和特征、各阶自相关系数的聚合统计特征、自回归系数特征、ricker小波分析特征、傅里叶变换系数特征、高于均值个数特征中的任意两个或两个以上。
11、在一个优选的实施例中,获取所述机器人在非积水环境中行进的多组传感器数据具体为:制造机器人在至少两种室内路面环境行进的事件,获取机器人的每种室内路面环境下行进的传感器数据。
12、在一个优选的实施例中,获取所述机器人在非积水环境中行进的多组传感器数据具体为:在机器人室内行进路线上泼水制造积水效果,获取机器人在行进路线上有积水区域行进的传感器数据。
13、在一个优选的实施例中,获取所述机器人在非积水环境中行进的多组传感器数据具体还包括:将机器人置于水池中进行,获取机器人在水池中行进的传感器数据;在下雨天,遥控机器人经过下雨造成的积水路面,并获取机器人经过积水路面的传感器数据。
14、第二方面,本发明提供一种机器人感知室内路面积水的检测方法,包括:
15、步骤一、获取机器人行进过程中的多组传感器数据;
16、步骤二、计算步骤一得到的每组传感器数据的时序特征组;
17、步骤三、将步骤二得到的时序特征组输入到已训练的检测模型中,通过所述检测模型的输出获知机器人是否在积水路面行驶,所述已训练的检测模型为第一方面所述的一种机器人感知室内路面积水的检测模型构建方法所得到的检测模型。
18、第三方面,本发明提供一种机器人,所述机器人能够感知室内路面是否积水,所述机器人通过如第二方面所述的一种机器人感知室内路面积水的检测方法实现对室内路面是否积水的感知。
19、第四方面,本发明提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以执行第一方面所述的一种机器人感知室内路面积水的检测模型构建方法。
20、本发明通过获得机器人在非积水环境和积水环境中行进的传感器数据,对传感器数据进行分析处理得到检测模型,该模型的获得无需通过人工处理的步骤,节省人力;通过剔除相关性系数不高的特征,减小计算量;得到的模型对机器人感知室内路面积水的检测准确性高。检测方法通过该检测模型,脱离图像分析,利用行进时机器人移动的传感器数据实现机器人感知室内路面积水的检测,且检测准确性高。
技术特征:
1.一种机器人感知室内路面积水的检测模型构建方法,其特征在于,包括:
2.如权利要求1所述的一种机器人感知室内路面积水的检测模型构建方法,其特征在于,多组所述传感器数据至少包括19组传感数据,19组所述传感数据分别为机器人x方向线速度、机器人y方向线速度、机器人z方向线速度、机器人x方向角速度、机器人y方向角速度、机器人z方向角速度、机器人x方向加速度、机器人y方向加速度、机器人z方向加速度、机器人x方向角度、机器人y方向角度、机器人z方向角度、左轮毂电机的编码速度、右轮毂电机的编码速度、左轮毂电机的实际速度、右轮毂电机的实际速度、左轮毂电机的移动距离、右轮毂电机的移动距离、机器人的移动距离。
3.如权利要求1所述的一种机器人感知室内路面积水的检测模型构建方法,其特征在于,所述计算每组传感器数据的时序特征组的具体为:取每组传感器数据中某段时间或者某一时间长度的传感器数据,将所述某段时间或者某一时间长度的传感器数据代表该组传感器数据进行时序特征提取,得到时序特征组。
4.如权利要求1所述的一种机器人感知室内路面积水的检测模型构建方法,其特征在于,所述时序特征组包括一阶差分绝对和特征、各阶自相关系数的聚合统计特征、自回归系数特征、ricker小波分析特征、傅里叶变换系数特征、高于均值个数特征中的任意两项或两项以上。
5.如权利要求1所述的一种机器人感知室内路面积水的检测模型构建方法,其特征在于,获取所述机器人在非积水环境中行进的多组传感器数据具体为:制造机器人在至少两种室内路面环境行进的事件,获取机器人的每种室内路面环境下行进的传感器数据。
6.如权利要求1所述的一种机器人感知室内路面积水的检测模型构建方法,其特征在于,获取所述机器人在非积水环境中行进的多组传感器数据具体为:在机器人室内行进路线上泼水制造积水效果,获取机器人在行进路线上有积水区域行进的传感器数据。
7.如权利要求6所述的一种机器人感知室内路面积水的检测模型构建方法,其特征在于,获取所述机器人在非积水环境中行进的多组传感器数据具体还包括:将机器人置于水池中行进,获取机器人在水池中行进的传感器数据;在下雨天,遥控机器人经过下雨造成的积水路面,并获取机器人经过积水路面的传感器数据。
8.一种机器人感知室内路面积水的检测方法,其特征在于,包括:
9.一种机器人,所述机器人能够感知室内路面是否积水,其特征在于,所述机器人通过如权利要求8所述的一种机器人感知室内路面积水的检测方法实现对室内路面是否积水的感知。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现以执行如权利要求1至7中任意一项所述的一种机器人感知室内路面积水的检测模型构建方法。
技术总结
本发明公开了一种检测模型构建方法、检测方法、机器人和存储介质,涉及移动机器人技术领域,解决了现有机器人对于室内路面积水检测不准确的问题,所述构建方法包括:获取机器人在非积水环境和积水环境中行进的多组传感器数据;计算每组传感器数据的时序特征组;采用决策树模型计算所述时序特征组中每一项特征和该时序特征组对应的结果之间的相关性系数,剔除相关性系数小于预设阈值的时序特征,所述结果分为机器人所在路面为非积水环境和机器人所在路面为积水环境两种;将保留的时序特征作为检测模型的输入,训练检测模型。本发明模型的获得无需通过人工处理,模型对机器人感知室内路面积水的检测准确性高。
技术研发人员:焦源
受保护的技术使用者:上海有个机器人有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!