基于参数识别和深度学习代理模型的实时混合试验方法及系统
本发明属于结构试验,具体涉及一种地震作用下的结构实时混合试验方法及系统。
背景技术:
1、结合子结构技术的混合试验方法,为大型结构的抗震性能评估提供了可行的试验手段。通过仅对关键构件进行试验加载,结构其余部分进行数值模拟,混合试验方法使得大比例尺甚至是足尺试件成为可能。
2、当试件中存在速度相关型构件时,如现代结构中常见的阻尼器等消能减振装置,则需要对试件进行实时加载,即开展实时混合试验。在实时混合试验中,结构中的速度相关型构件被取出作为试验子结构进行加载,其每步的加载命令都来源于数值子结构的计算,这就要求数值计算必须在一个时间积分步内完成。正是这一对数值子结构计算效率的要求,导致二十多年来实时混合试验的理论基础尽管日趋完善,却很难应用到大型复杂结构上,与实际工程结构的建设趋势不相匹配。目前关于实时混合试验中数值计算效率方面的研究进展大致可以分为四类:简化数值模型、增大积分步长、提高硬件计算效率、开发新型高效计算方法。这些方法虽然可以提高数值子结构的计算效率,但值得指出的是,实时混合试验的时间通常以毫秒或秒为量级,很多情况下单步时间步长不超过10毫秒。面对以小时或天为时间尺度的数值子结构有限元分析时,要在10毫秒内完成计算几乎是不可能的任务。
3、针对混合试验,深度学习方法可以为解决数值子结构的计算效率问题提供技术手段。采用深度学习方法建立数值子结构的代理模型,最耗时的数值计算和学习过程均可在试验前完成,从而可解决实时混合试验中数值计算效率与精度间的矛盾问题。然而,目前利用深度学习模型开展实时混合试验依然存在着很多问题,比如,实时混合试验中数值子结构的位移响应会用于试验子结构的加载,加载后测回的试验子结构恢复力又会作为数值子结构下一步的输入。因此,若以试验子结构恢复力作为深度学习模型的输入,模型预测误差会向后传递,导致误差的累积,一般短短几步之后预测位移就会发散,引起试验失败。
技术实现思路
1、本发明是为了解决现有的实时混合试验中数值子结构的计算效率无法满足实时性的要求的问题,以及采用现有的采用深度学习解决数值子结构计算效率的方法存在误差累积容易导致试验失败的问题。
2、基于参数识别和深度学习代理模型的实时混合试验方法,包括以下步骤:
3、s1、提前预设一系列试验子结构本构参数值,建立并利用整体结构的有限元模型,获得不同本构参数下的结构响应时程;
4、s2、建立整体结构动力响应的深度学习代理模型strucdl,strucdl的输入包括试验子结构本构参数,输出是试验子结构的位移响应时程;利用不同本构参数以及对应的结构响应时程训练strucdl,得到训练好的strucdl;
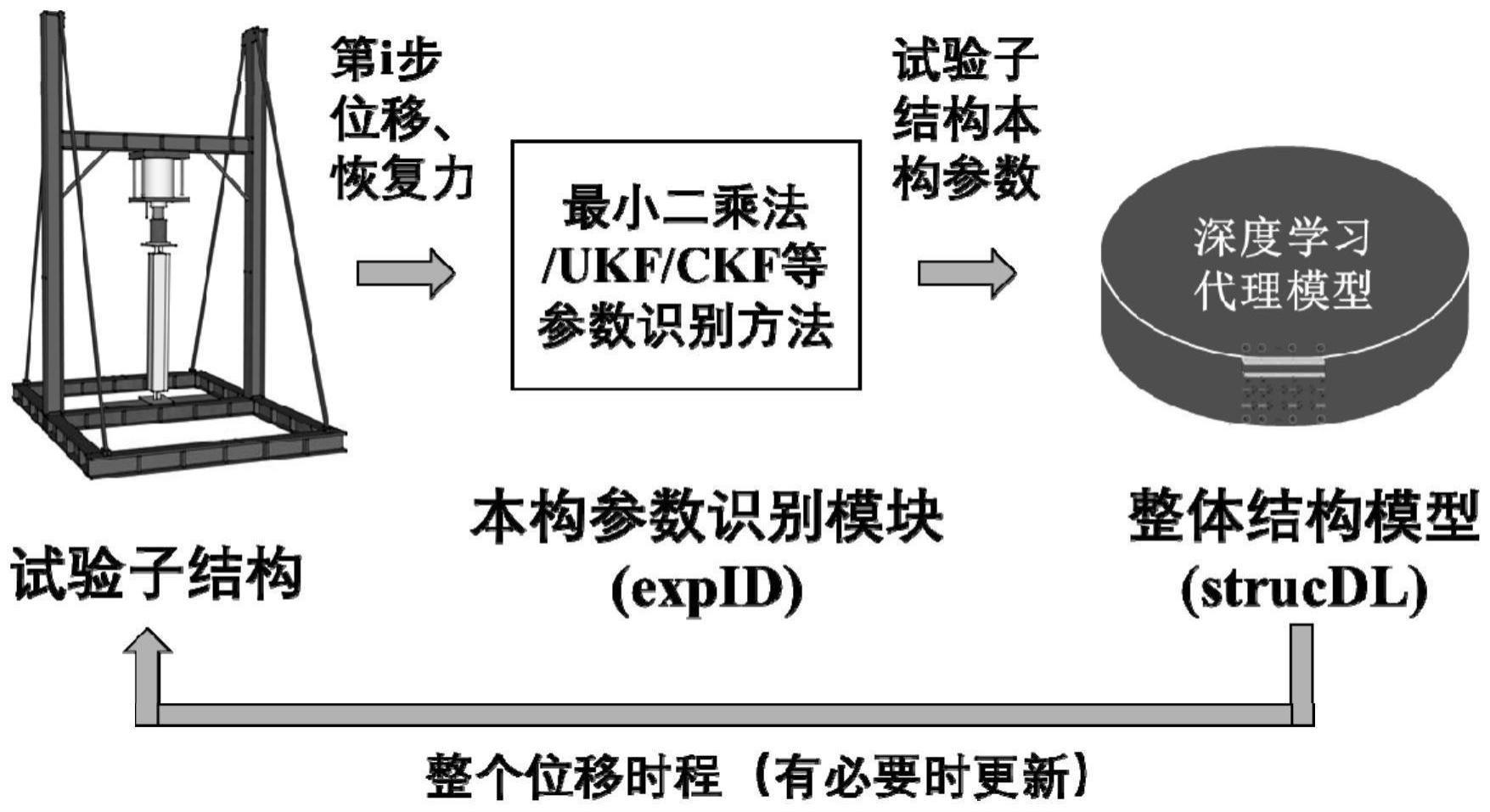
5、s3、将试验子结构的恢复力和位移作为输入,采用识别算法得到试验子结构的本构参数,将采用识别算法得到试验子结构的本构参数的过程记为试验子结构本构参数识别模块,即expid模块;
6、s4、基于所建立的整体结构深度学习代理模型strucdl和试验子结构参数识别模块,开展实时混合试验;
7、试验中将第i步的试验子结构恢复力、位移发给expid模块进行参数识别,获得当前的本构参数;
8、再将本构参数发给strucdl,预测试验子结构第i+1步的位移响应时程;
9、将预测的第i+1步的位移响应时程发给作动器,对试验子结构进行加载,得到第i+1步的试验子结构恢复力;
10、s5、重复步骤s4,直至试验结束。
11、进一步地,s2中strucdl的输入还包括地震动。
12、进一步地,s2中训练strucdl的过程是采用离线学习的方式进行训练的。
13、进一步地,s3采用识别算法得到试验子结构的本构参数的过程中使用的识别算法为卡尔曼滤波算法,所述卡尔曼滤波算法包括无迹卡尔曼滤波算法。
14、进一步地,所述的深度学习代理模型为lstm神经网络模型。
15、基于参数识别和深度学习代理模型的实时混合试验系统,包括:
16、整体结构动力响应预测模块,即strucdl预测模块:采用整体结构动力响应的深度学习代理模型strucdl预测试验子结构的位移响应时程;strucdl的输入包括试验子结构本构参数,输出是试验子结构的位移响应时程;
17、所述的strucdl为预先训练好的,训练过程包括以下步骤:
18、提前预设一系列试验子结构本构参数值,利用整体结构的有限元模型获得不同本构参数下的结构响应时程;
19、利用不同本构参数以及对应的结构响应时程训练strucdl,得到训练好的strucdl;
20、试验子结构本构参数的识别模块,即expid模块:以试验子结构的恢复力和位移作为输入,采用识别算法得到试验子结构的本构参数;
21、混合试验控制模块:基于整体结构动力响应预测模块和expid模块,控制实时混合试验的进行,直至试验结束;控制实时混合试验进行的过程包括以下步骤:
22、试验中将第i步的试验子结构恢复力、位移发给expid模块进行参数识别,获得当前的本构参数;
23、再将本构参数发给strucdl预测模块,预测试验子结构后续的位移响应时程;
24、将预测时程中的第i+1步的值发给作动器,对试验子结构进行加载,得到第i+1步的试验子结构恢复力。
25、进一步地,所述的基于参数识别和深度学习代理模型的实时混合试验系统,还包括加载系统及作动器,所述混合试验控制模块将预测时程中的第i+1步的值发给作动器的过程是基于加载系统实现的,即混合试验控制模块通过接口将第i+1步的值发给加载系统,加载系统用于控制作动器,作动器用于执行对试验子结构的加载。
26、进一步地,strucdl预测模块中整体结构动力响应的深度学习代理模型strucdl的输入还包括地震动。
27、进一步地,expid模块采用识别算法得到试验子结构的本构参数的过程中使用的识别算法为卡尔曼滤波算法,所述卡尔曼滤波算法包括无迹卡尔曼滤波算法。
28、进一步地,所述的深度学习代理模型为lstm神经网络模型。
29、有益效果:
30、第一,本发明采用深度学习方法建立结构动力响应的代理模型开展实时混合试验,所有耗时的计算工作,包括结构的有限元计算、深度学习代理模型的训练,都可在试验开展前离线完成,在线阶段只需运行训练好的预测模型,可以极大地提高计算效率;同时也避免了采用非常简化的数值模型的实时混合试验的理论很难应用到大型复杂结构上的问题,本发明可以很好的应用到大型复杂结构上,能够取得非常好的试验效果。
31、第二,本发明结合参数识别方法,以试验子结构的本构参数而非恢复力作为深度学习模型的输入,可以有效避免深度学习预测误差累积而导致试验失败的问题。
技术特征:
1.基于参数识别和深度学习代理模型的实时混合试验方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的基于参数识别和深度学习代理模型的实时混合试验方法,其特征在于:s2中strucdl的输入还包括地震动。
3.根据权利要求1或2所述的基于参数识别和深度学习代理模型的实时混合试验方法,其特征在于:s2中训练strucdl的过程是采用离线学习的方式进行训练的。
4.根据权利要求3所述的基于参数识别和深度学习代理模型的实时混合试验方法,其特征在于:s3采用识别算法得到试验子结构的本构参数的过程中使用的识别算法为卡尔曼滤波算法,所述卡尔曼滤波算法包括无迹卡尔曼滤波算法。
5.根据权利要求4所述的基于参数识别和深度学习代理模型的实时混合试验方法,其特征在于:所述的深度学习代理模型为lstm神经网络模型。
6.基于参数识别和深度学习代理模型的实时混合试验系统,其特征在于:所述系统包括:
7.根据权利要求6所述的基于参数识别和深度学习代理模型的实时混合试验系统,其特征在于:还包括加载系统及作动器,所述混合试验控制模块将预测时程中的第i+1步的值发给作动器的过程是基于加载系统实现的,即混合试验控制模块通过接口将第i+1步的值发给加载系统,加载系统用于控制作动器,作动器用于执行对试验子结构的加载。
8.根据权利要求6或7所述的基于参数识别和深度学习代理模型的实时混合试验系统,其特征在于:strucdl预测模块中整体结构动力响应的深度学习代理模型strucdl的输入还包括地震动。
9.根据权利要求8所述的基于参数识别和深度学习代理模型的实时混合试验系统,其特征在于:expid模块采用识别算法得到试验子结构的本构参数的过程中使用的识别算法为卡尔曼滤波算法,所述卡尔曼滤波算法包括无迹卡尔曼滤波算法。
10.根据权利要求9所述的基于参数识别和深度学习代理模型的实时混合试验系统,其特征在于:所述的深度学习代理模型为lstm神经网络模型。
技术总结
基于参数识别和深度学习代理模型的实时混合试验方法及系统,属于结构试验技术领域。为了解决现有的实时混合试验中数值子结构的计算效率无法满足实时性的要求的问题,以及采用现有的采用深度学习解决数值子结构计算效率的方法存在误差累积容易导致试验失败的问题。本发明提前获得不同本构参数下的结构响应时程,利用不同本构参数以及对应的结构响应时程训练整体结构动力响应的深度学习代理模型strucDL;试验中基于第i步的试验子结构恢复力、位移进行参数识别获得当前的本构参数;再将本构参数发给strucDL,预测试验子结构后续的位移响应时程,然后进行加载得到第i+1步的试验子结构恢复力,重复进行直至试验结束。
技术研发人员:杨格,沈晗瑞,吴斌,徐扬
受保护的技术使用者:武汉理工大学三亚科教创新园
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!