一种细胞三维运动的定位与追踪方法、装置及存储介质
本发明涉及成像测量领域,尤其涉及一种细胞三维运动的定位与追踪方法、装置及存储介质。
背景技术:
1、细胞作为生命的最小单位,其三维运动和迁移行为的研究对于生命科学、医学、农业生产等领域具有重要意义。然而,细胞自身与周围介质的光学对比度弱,内部存在复杂的细胞器结构;同时,它在运动和迁移的过程中可发生复杂的形态变化。因此,尽管对细胞,尤其是非贴壁细胞进行原位、实时的三维定位及追踪极具挑战性。
2、目前,细胞动态观测方法通常基于明场照明或标记细胞进行荧光实时成像,获取图像后得到细胞的二维轨迹并进行分析。这些方法适合在表面迁移的贴壁细胞,在对细胞成像后结合图像分割等处理方法可识别细胞的中心或特异性标记的细胞器,进而实现细胞在二维方向上的定位与追踪。然而,这类方法无法反映细胞在真实三维空间中的运动和迁移方式,尤其是处于非贴壁状态,尤其是复杂三维环境中迁移的细胞,具有很大的局限性。目前要实现对细胞的三维追踪,往往要依赖高速的共聚焦荧光显微镜在不同高度的焦面对细胞进行染色并逐层扫描,相关硬件成本高昂,而且无法实现原位监测。而对细胞进行特殊的染色处理可能会破坏某些细胞,譬如免疫细胞的健康状态。
3、可见,亟需一种高精度、无需标记、鲁棒性好的细胞三维定位追踪方法,以实现对细胞运动规律的实时研究,为相关领域提供启示。
技术实现思路
1、为至少一定程度上解决现有技术中存在的技术问题之一,本发明的目的在于提供一种细胞三维运动的定位与追踪方法、装置及存储介质。
2、本发明所采用的技术方案是:
3、一种细胞三维运动的定位与追踪方法,包括以下步骤:
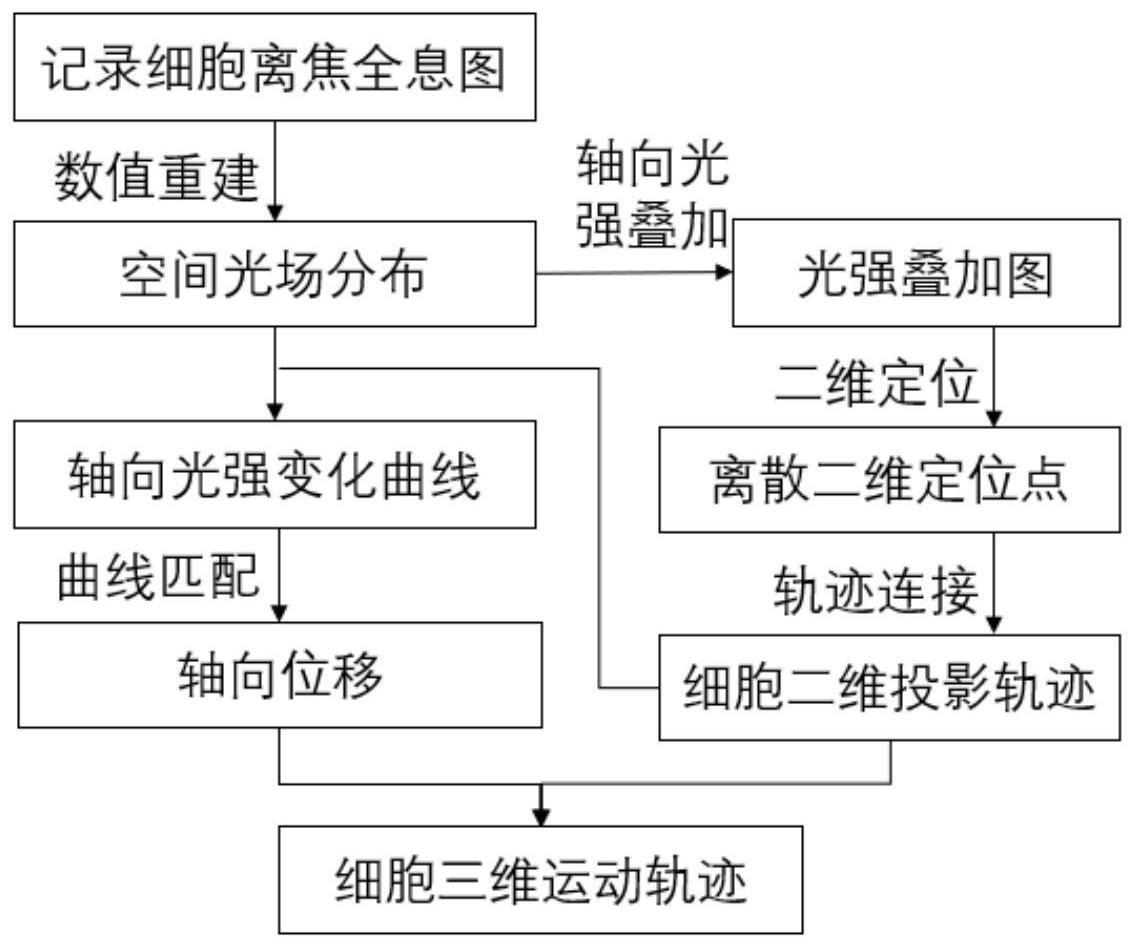
4、s1、使用干涉光学成像方法对包含多个细胞的样品进行拍摄,对所拍摄的细胞干涉图像进行数值重建,计算出细胞样品在三维空间的散射光强分布;
5、s2、通过纵向光强值的叠加和局部最大值搜索的方式获取每一帧干涉图像上细胞中心的投影位置,以实现单帧细胞图像二维定位;
6、s3、对于已经实现二维定位的细胞个体,根据其位置的空时一致性进行前后帧的二维轨迹连接;
7、s4、根据二维定位坐标以及散射光强分布获取不同时刻下细胞中心的纵向光强变化曲线,根据纵向光强变化曲线计算同一细胞相邻帧的相对纵向位移;
8、s5、根据相对纵向位移和二维轨迹的空时一致性获得同一细胞的三维连续空间运动轨迹。
9、进一步地,步骤s1中所述干涉光学成像方法通过平面波或者球面波的方式进行照明,获得的图像为离焦光学干涉图;
10、所述三维空间的散射光强分布由离焦光学干涉图像,根据光学衍射原理的传播模拟公式获得,为了确保能够获得细胞三维位置,重建距离应囊括离焦-聚焦-离焦整个范围。
11、进一步地,步骤s2中二维定位的步骤中应用了纵向光强值叠加的方法,包括:
12、对单帧图像计算获得散射光强分布的离散数值沿纵向进行叠加,进而获得与原图像像素尺寸一致的纵向光强叠加图,在该纵向光强叠加图的基础上进行后续的二维定位计算。
13、进一步地,所述步骤s2,包括:
14、根据细胞尺寸及放大倍数设定局部最大值的判定范围,遍历整个叠加图进行搜索;
15、当图像上某位置数值大于以该点为中心划定的预设判定范围内的其余点,则判定该点为单个细胞对应二维投影位置。
16、进一步地,所述步骤s3,包括:
17、s31、设定轨迹连接最大距离,当相邻图像二维定位点距离大于预设值时,判定两帧图像中的细胞不为同一细胞;
18、s32、按时间顺序排列所有二维定位结果,以第一帧二维定位点为中心,寻找下一帧是否存在对应点;当预设距离范围内不存在定位点时,终止该轨迹的搜索;当预设距离内仅存在一个定位点时,认为该点与起点为同一轨迹;当预设距离内二个及以上定位点时,先假定定位点均为对应点,并根据后续计算的参数判定前后帧的二维轨迹连接方式;
19、s33、重复步骤s32,并判断所有相邻帧的二维定位点间的连接关系,根据连接关系将获得的所有定位点整理为细胞中心二维投点影随时间运动的轨迹,舍弃其中未被连接的定位点及过短的轨迹,获得细胞的二维投影轨迹。
20、进一步地,所述步骤s4,包括:
21、s41、根据二维轨迹确定需要进行匹配的两条光强曲线i1、i2;
22、s42、从光强曲线i1中获取细胞光强特征曲线;
23、s43、将光强特征曲线与光强曲线i2进行匹配:从光强曲线i2的端点出发,截取与光强特征曲线等长的线段,计算该线段与光强特征曲线间相似度的评价参数r1;平移一个离散数据点再次截取与特征曲线等长的线段,计算新线段的评价参数r2;以步进方式重复该过程,直至截取线段终点超出光强曲线i2的范围,获得系列参数r3、r4、……、rn,根据参数变化规律获得曲线的位移关系,进而计算两帧图像间细胞相对运动距离;
24、s44、使用空间光强最大值位置确定轨迹起点三维位置,并对两两相对位移进行叠加获得细胞在空间中运动轨迹,从而实现细胞的纵向定位和三维轨迹追踪。
25、进一步地,所述光强特征曲线包含细胞中心位置,该光强特征曲线通过光强曲线i1舍弃两端远离焦面的数据获得;根据估算细胞最大纵向位移和重建范围,截取包含光强曲线i1聚焦范围的部分光强曲线作为细胞定位特征。
26、进一步地,步骤s43中的评价参数不仅用于获取细胞纵向位移,也用于进行二维轨迹定位点是否为同一细胞的二次验证评估;该评价参数通过计算相关系数或者计算对应位置数值的差值平方和的方式获得。
27、本发明所采用的另一技术方案是:
28、一种细胞三维运动的定位与追踪装置,包括:
29、至少一个处理器;
30、至少一个存储器,用于存储至少一个程序;
31、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现如上所述方法。
32、本发明所采用的另一技术方案是:
33、一种计算机可读存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于执行如上所述方法。
34、本发明的有益效果是:本发明使用干涉光学成像法获取三维空间中细胞的散射光场分布,再通过先进行二维细胞定位后基于该位置的三维细胞光场的相对位移进行纵向定位的方法实现对多个细胞的三维实时定位与追踪。本发明可实现对各种种类、不同形态的细胞的三维实时定位和追踪,定位准确性高,具有较好的鲁棒性,能应用于包括贴壁或非贴壁细胞在内的具有复杂三维形态变化细胞的三维运动与迁移的相关表征与研究。
技术特征:
1.一种细胞三维运动的定位与追踪方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种细胞三维运动的定位与追踪方法,其特征在于,步骤s1中所述干涉光学成像方法通过平面波或者球面波的方式进行照明,获得的图像为离焦光学干涉图;
3.根据权利要求1所述的一种细胞三维运动的定位与追踪方法,其特征在于,步骤s2中二维定位的步骤中应用了纵向光强值叠加的方法,包括:
4.根据权利要求1所述的一种细胞三维运动的定位与追踪方法,其特征在于,所述步骤s2,包括:
5.根据权利要求1所述的一种细胞三维运动的定位与追踪方法,其特征在于,所述步骤s3,包括:
6.根据权利要求1所述的一种细胞三维运动的定位与追踪方法,其特征在于,所述步骤s4,包括:
7.根据权利要求6所述的一种细胞三维运动的定位与追踪方法,其特征在于,所述光强特征曲线包含细胞中心位置,该光强特征曲线通过光强曲线i1舍弃两端远离焦面的数据获得;根据估算细胞最大纵向位移和重建范围,截取包含光强曲线i1聚焦范围的部分光强曲线作为细胞定位特征。
8.根据权利要求6所述的一种细胞三维运动的定位与追踪方法,其特征在于,步骤s43中的评价参数不仅用于获取细胞纵向位移,也用于进行二维轨迹定位点是否为同一细胞的二次验证评估;该评价参数通过计算相关系数或者计算对应位置数值的差值平方和的方式获得。
9.一种细胞三维运动的定位与追踪装置,其特征在于,包括:
10.一种计算机可读存储介质,其中存储有处理器可执行的程序,其特征在于,所述处理器可执行的程序在由处理器执行时用于执行如权利要求1-8任一项所述方法。
技术总结
本发明公开了一种细胞三维运动的定位与追踪方法、装置及存储介质,属于成像测量领域。其中方法包括:获取视野范围内多个细胞在空间中的实时三维散射光场分布;进行单帧细胞图像二维定位;对视野内已实现二维定位的细胞个体根据其位置的空时一致性等进行前后帧的二维轨迹连接;对单个细胞的二维轨迹上每个位置点进行纵向定位;根据相对纵向位移和二维轨迹的空时一致性获得同一细胞的三维连续空间运动轨迹。本发明使用干涉光学成像法获取三维空间中细胞的散射光场分布,再通过先进行二维细胞定位后基于该位置的三维细胞光场的相对位移进行纵向定位的方法,实现对多个细胞的三维实时定位与追踪;具有定位准确性高及鲁棒性好的优点。
技术研发人员:龚湘君,张广照,何炳恩
受保护的技术使用者:华南理工大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!