地面点云的分割方法、装置、车辆以及存储介质与流程
本申请涉及点云数据处理,更具体地,涉及一种地面点云的分割方法、装置、车辆以及存储介质。
背景技术:
1、随着智能车辆的发展,车载激光雷达在车辆行驶过程中被广泛使用,例如可以应用于障碍物检测、激光点云定位等。但在实现这些功能之前,车辆首先需要对激光雷达获取的激光点云进行地面点云分割,以去除其中的地面点云。通常情况下,车辆可以利用各个激光点云的高度差、梯度等特征,或者通过平面拟合的方法确定其中的地面点云,但这种方法容易受到点云噪点的影响,出现误分割,地面点云分割的准确度不高。
技术实现思路
1、鉴于上述问题,本申请提出了一种地面点云的分割方法、装置、车辆以及存储介质,以使减少点云噪点的影响,使地面点云的分割更加精准。
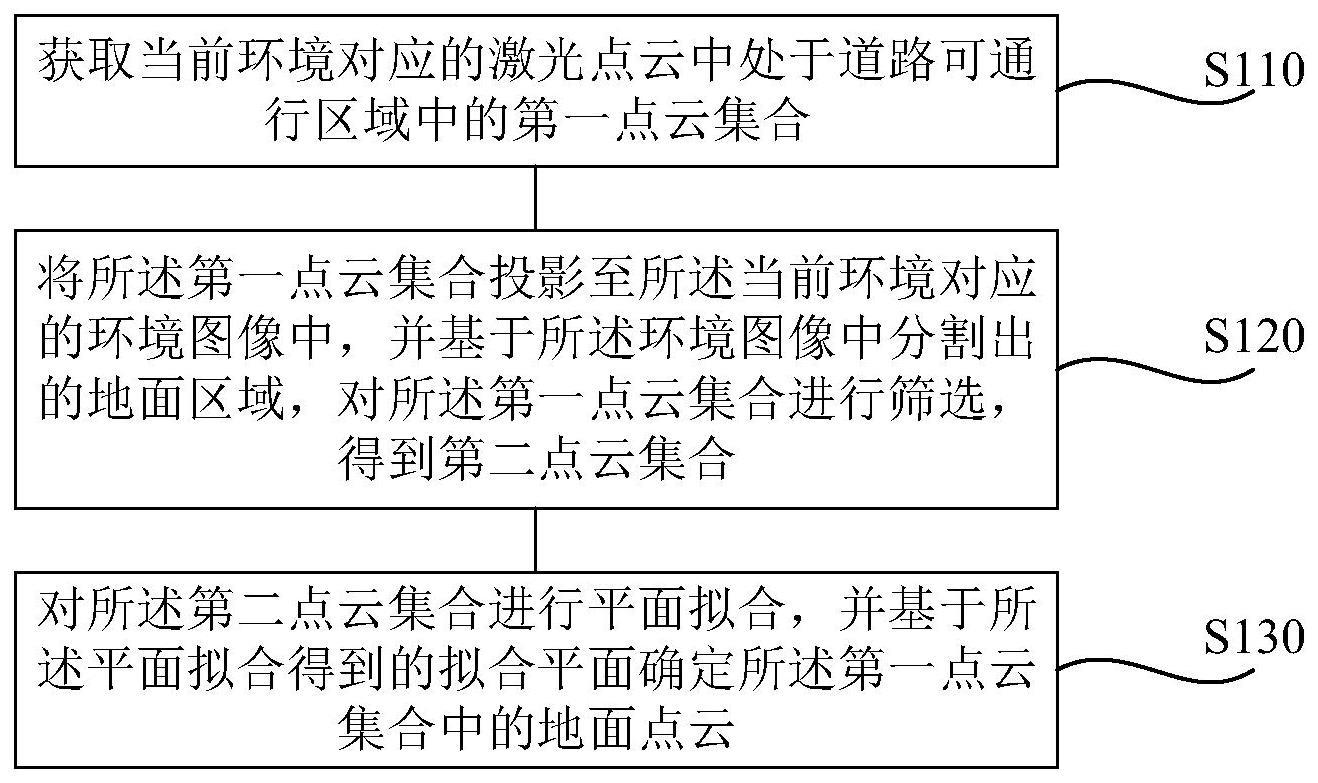
2、第一方面,本申请实施例提供了一种地面点云的分割方法,所述方法包括:获取当前环境对应的激光点云中处于道路可通行区域中的第一点云集合;将所述第一点云集合投影至所述当前环境对应的环境图像中,并基于所述环境图像中分割出的地面区域,对所述第一点云集合进行筛选,得到第二点云集合,所述第二点云集合中包括位于所述地面区域中的激光点云;对所述第二点云集合进行平面拟合,并基于所述平面拟合得到的拟合平面确定所述第一点云集合中的地面点云。
3、第二方面,本申请实施例提供了一种地面点云的分割装置,所述装置包括:点云获取模块、点云处理模块以及点云确定模块,其中,所述点云获取模块用于获取当前环境对应的激光点云中处于道路可通行区域中的第一点云集合;所述点云处理模块用于将所述第一点云集合投影至所述当前环境对应的环境图像中,并基于所述环境图像中分割出的地面区域,对所述第一点云集合进行筛选,得到第二点云集合,所述第二点云集合中包括位于所述地面区域中的激光点云;所述点云确定模块用于对所述第二点云集合进行平面拟合,并基于所述平面拟合得到的拟合平面确定所述第一点云集合中的地面点云。
4、第三方面,本申请实施例提供了一种车辆,包括:一个或多个处理器;存储器;一个或多个应用程序,其中所述一个或多个应用程序被存储在所述存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序配置用于执行上述第一方面提供的地面点云的分割方法。
5、第四方面,本申请实施例提供了一种计算机可读取存储介质,所述计算机可读取存储介质中存储有程序代码,所述程序代码可被处理器调用执行上述第一方面提供的地面点云的分割方法。
6、本申请提供的方案,通过获取当前环境对应的激光点云中处于道路可通行区域中的第一点云集合;将第一点云集合投影至当前环境对应的环境图像中,并基于环境图像中分割出的地面区域,对第一点云集合进行筛选,得到第二点云集合;对第二点云集合进行平面拟合,并基于平面拟合得到的拟合平面确定第一点云集合中的地面点云。通过环境图像中分割出的地面区域,对第一点云集合进行筛选,使得到的第二点云集合中的激光点云均是确定的处于地面区域的激光点云,由此基于第二点云集合进行平面拟合,能够得到更加准确的拟合平面,进而精准地确定第一点云集合中的地面点云,使地面点云的分割更加准确。
技术特征:
1.一种地面点云的分割方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述将所述第一点云集合投影至所述当前环境对应的环境图像中,并基于所述环境图像中分割出的地面区域,对所述第一点云集合进行筛选,得到第二点云集合,包括:
3.根据权利要求1所述的方法,其特征在于,所述对所述第二点云集合进行平面拟合,并基于所述平面拟合得到的拟合平面确定所述第一点云集合中的地面点云,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述第一栅格图的每个栅格中的激光点云,对所述第一栅格图中的满足预设合并条件的栅格进行合并,得到第二栅格图,包括:
5.根据权利要求3所述的方法,其特征在于,所述基于所述第二栅格图的每个栅格对应的拟合平面,确定所述第一点云集合中的地面点云,包括:
6.根据权利要求1所述的方法,其特征在于,在所述获取当前环境对应的激光点云中处于道路可通行区域中的第一点云集合之前,所述方法还包括:
7.根据权利要求1-6任一项所述的方法,其特征在于,在所述得到第二点云集合之后,所述方法还包括:
8.一种地面点云的分割装置,其特征在于,所述装置包括点云获取模块、点云处理模块以及点云确定模块,其中,
9.一种车辆,其特征在于,所述车辆包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有程序代码,所述程序代码可被处理器调用执行如权利要求1-7任一项所述的方法。
技术总结
本申请公开了一种地面点云的分割方法、装置、车辆以及存储介质。该方法通过获取当前环境对应的激光点云中处于道路可通行区域中的第一点云集合;将第一点云集合投影至当前环境对应的环境图像中,并基于环境图像中分割出的地面区域,对第一点云集合进行筛选,得到第二点云集合;对第二点云集合进行平面拟合,并基于平面拟合得到的拟合平面确定第一点云集合中的地面点云。通过环境图像中分割出的地面区域,对第一点云集合进行筛选,使得到的第二点云集合中的激光点云均是确定的处于地面区域的激光点云,由此基于第二点云集合进行平面拟合,能够得到更加准确的拟合平面,进而精准地确定第一点云集合中的地面点云,使地面点云的分割更加准确。
技术研发人员:张三林,翁茂楠,夏锌,孙玲,周浩,吴钦钊
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!