一种复杂环境下无人艇目标检测系统及方法
本发明涉及陶瓷胚体制作,特别是一种复杂环境下无人艇目标检测系统及方法。
背景技术:
1、当前,随着科技与社会需求的快速发展,无人平台的发展也越来越快。基于水上作业的需求,无人艇也得到迅速发展并使用各个水上作业工作中,如水上巡航、清洁、救援等。在复杂的水上环境进行目标识别任务时,目前常用的目标检测算法是yolov5。
2、yolov5骨干网络使用的是基于cspdarknet53的骨干网络结构,虽然这些网络在提取单一尺度的特征方面表现良好,但缺少明确的多尺度信息融合机制,这会导致网络对不同尺度目标的检测能力不够强大,缺乏多尺度信息融合的问题。同时,应用于无人艇目标检测时,在复杂场景中存在大量遮挡、尺度变化等因素,这会导致骨干网络的特征提取能力受限,影响目标检测的准确性和鲁棒性。
3、yolov5中的panet结构旨在改善特征融合过程,将骨干网络不同层级的特征进行融合。它通过侧连接将浅层特征与深层特征相结合,实现了高分辨率特征和低分辨率特征的融合。这使得模型能够同时捕捉到深层特征的语义信息和浅层特征的细节信息。但panet需要进行跨阶段的特征聚合和融合,这涉及到大量的特征图操作和通道交互,需要较高的计算资源。这会导致训练和推理的速度较慢,特别是在资源受限的设备上,同时panet中的跨阶段连接和特征融合需要额外的参数来进行操作。这增加了模型的参数数量,会增加过拟合的风险,并且需要更多的存储空间。此外,panet结构对小目标处理仍然有局限性,由于水面环境复杂,无人艇容易受到水浪及附近环境干扰,会受到特征分辨率较低的影响,导致识别精度下降,系统鲁棒性较差。
技术实现思路
1、针对上述缺陷,本发明的目的在于提出一种复杂环境下无人艇目标检测系统及方法,在确保目标识别的准确性前提下,提高检测的鲁棒性。
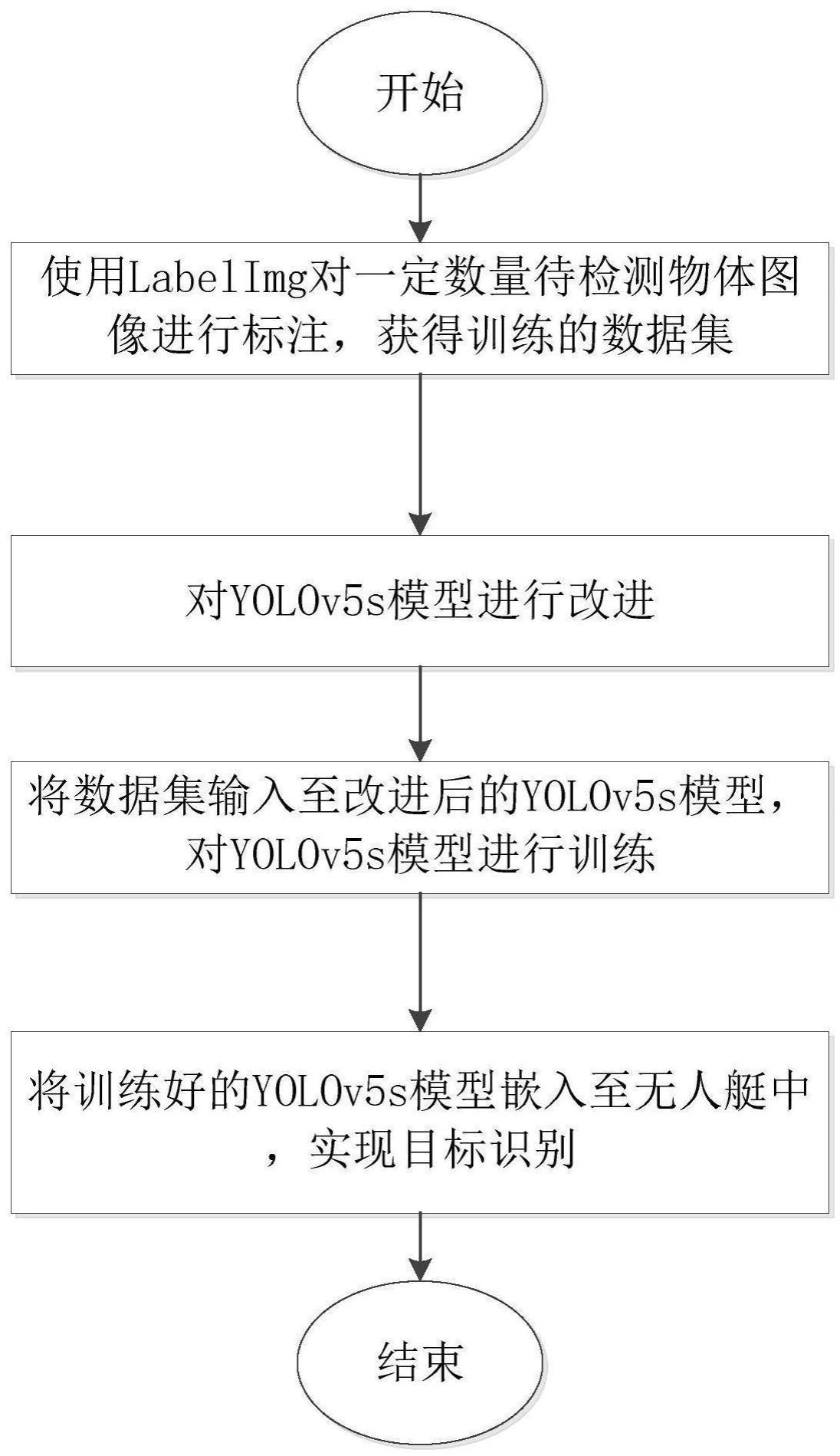
2、一种复杂环境下无人艇目标检测方法,包括以下步骤:
3、使用labelimg对一定数量待检测物体图像进行标注,获得训练的数据集;
4、对yolov5s模型进行改进,其中改进包括将eca注意力机制模块融入yolov5s模型的backbone以及将yolov5s模型中将自底向上特征金字塔改为加权双向特征金字塔网络;
5、将数据集输入至改进后的yolov5s模型,对yolov5s模型进行训练;
6、将训练好的yolov5s模型嵌入至无人艇中,实现目标识别。
7、优选的,所述将eca注意力机制模块融入yolov5s模型的backbone前还需要执行如下操作:
8、eca注意力机制模块在se模块上使用全连接层fc学习通道注意信息,并使用卷积学习通道的尺寸规格修改为1*1。
9、优选的,将eca注意力机制模块融入yolov5s模型的backbone的步骤如下:
10、步骤a1:将输入的特征图进过全局平均池化操作,将特征图的维度从[h,w,c]缩减为[1,1,c]的向量;
11、步骤a2:根据特征图的通道数,获取以为卷积核的大小;
12、步骤a3:根据卷积核的大小进行一维卷积操作,得到每个通道的权重;
13、步骤a4:将每一个通道的权重与原输入特征图进行逐通道相乘,得到加权后的特征图;
14、步骤a5:将eca注意力模块融合到yolov5s的backbone的四个c3模块中,形成c3_eca模块。
15、优选的,步骤a2中过去卷积核的大小公式如下:
16、
17、其中c为通道维数,r与b为超参数,其中r设置为2、b设置为1,| |odd表示最接近的奇数。
18、优选的,加权双向特征金字塔网络中进行加权特征融合的计算方式如下:
19、
20、
21、其中piin、pitd、piout分别为第i层的输入特征、中间特征与输出特征,re size()表示上采样或者下采样操作,ε表示是一个小的常数,用于防止分母为零,wk、w′k表示学习的权重参数。
22、一种复杂环境下无人艇目标检测系统,使用所述一种复杂环境下无人艇目标检测方法,包括收集模块、改进模块、训练模块以及应用模块;
23、所述收集模块用于使用labelimg对一定数量待检测物体图像进行标注,获得训练的数据集;
24、所述改进模块用于对yolov5s模型进行改进,其中改进包括将eca注意力机制模块融入yolov5s模型的backbone以及将yolov5s模型中将自底向上特征金字塔改为加权双向特征金字塔网络;
25、所述训练模块用于将数据集输入至改进后的yolov5s模型,对yolov5s模型进行训练;
26、所述应用模块用于将训练好的yolov5s模型嵌入至无人艇中,实现目标识别。
27、上述技术方案中的一个技术方案具有如下优点或有益效果:在yolov5骨干网络加入eca注意力机制模块和将neck替换为加权双向特征金字塔网络对无人艇在复杂环境下的目标检测任务能带来更好的识别效果。通过多尺度特征融合、动态特征调整和强大的特征表示能力,可以提高目标检测的准确性和鲁棒性,同时保持高效的计算性能。
技术特征:
1.一种复杂环境下无人艇目标检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种复杂环境下无人艇目标检测方法,其特征在于,所述将eca注意力机制模块融入yolov5s模型的backbone前还需要执行如下操作:
3.根据权利要求2所述一种复杂环境下无人艇目标检测方法,其特征在于,将eca注意力机制模块融入yolov5s模型的backbone的步骤如下:
4.根据权利要求3所述一种复杂环境下无人艇目标检测方法,其特征在于,步骤a2中过去卷积核的大小公式如下:
5.根据权利要求1所述一种复杂环境下无人艇目标检测方法,其特征在于,加权双向特征金字塔网络中进行加权特征融合的计算方式如下:
6.一种复杂环境下无人艇目标检测系统,使用权利要求1~5任一项所述一种复杂环境下无人艇目标检测方法,其特征在于,包括收集模块、改进模块、训练模块以及应用模块;
技术总结
一种复杂环境下无人艇目标检测方法,包括以下步骤:使用LabelImg对一定数量待检测物体图像进行标注,获得训练的数据集;对YOLOv5s模型进行改进,其中改进包括将ECA注意力机制模块融入YOLOv5s模型的Backbone以及将YOLOv5s模型中将自底向上特征金字塔改为加权双向特征金字塔网络;将数据集输入至改进后的YOLOv5s模型,对YOLOv5s模型进行训练;将训练好的YOLOv5s模型嵌入至无人艇中,实现目标识别。在YOLOv5骨干网络加入ECA注意力机制模块和将Neck替换为加权双向特征金字塔网络对无人艇在复杂环境下的目标检测任务能带来更好的识别效果。通过多尺度特征融合、动态特征调整和强大的特征表示能力,可以提高目标检测的准确性和鲁棒性,同时保持高效的计算性能。
技术研发人员:饶红霞,曾鑫煌,杨立鑫,徐雍,刘畅,陶杰
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!