一种多摄像头人体动作识别方法与流程
本发明涉及人体动作识别,具体涉及一种多摄像头人体动作识别方法。
背景技术:
1、现有的人体动作识别系统主要通过对视频或图像进行人体模型训练,从而进行人体动作描述,但是在识别的过程中,由于单摄像头的识别存在人体肢体识别不完整,肢体遮挡而造成遗漏,因而对人体动作的识别也就很容易出现无法进行特征识别的现象,因此需要对人体动作的单摄像头识别进行信息补充及增强,以便于更准确的识别连续的人体动作。
技术实现思路
1、针对现有技术中的上述不足,本发明提供了一种多摄像头人体动作识别方法。
2、为了达到上述发明目的,本发明采用的技术方案为:
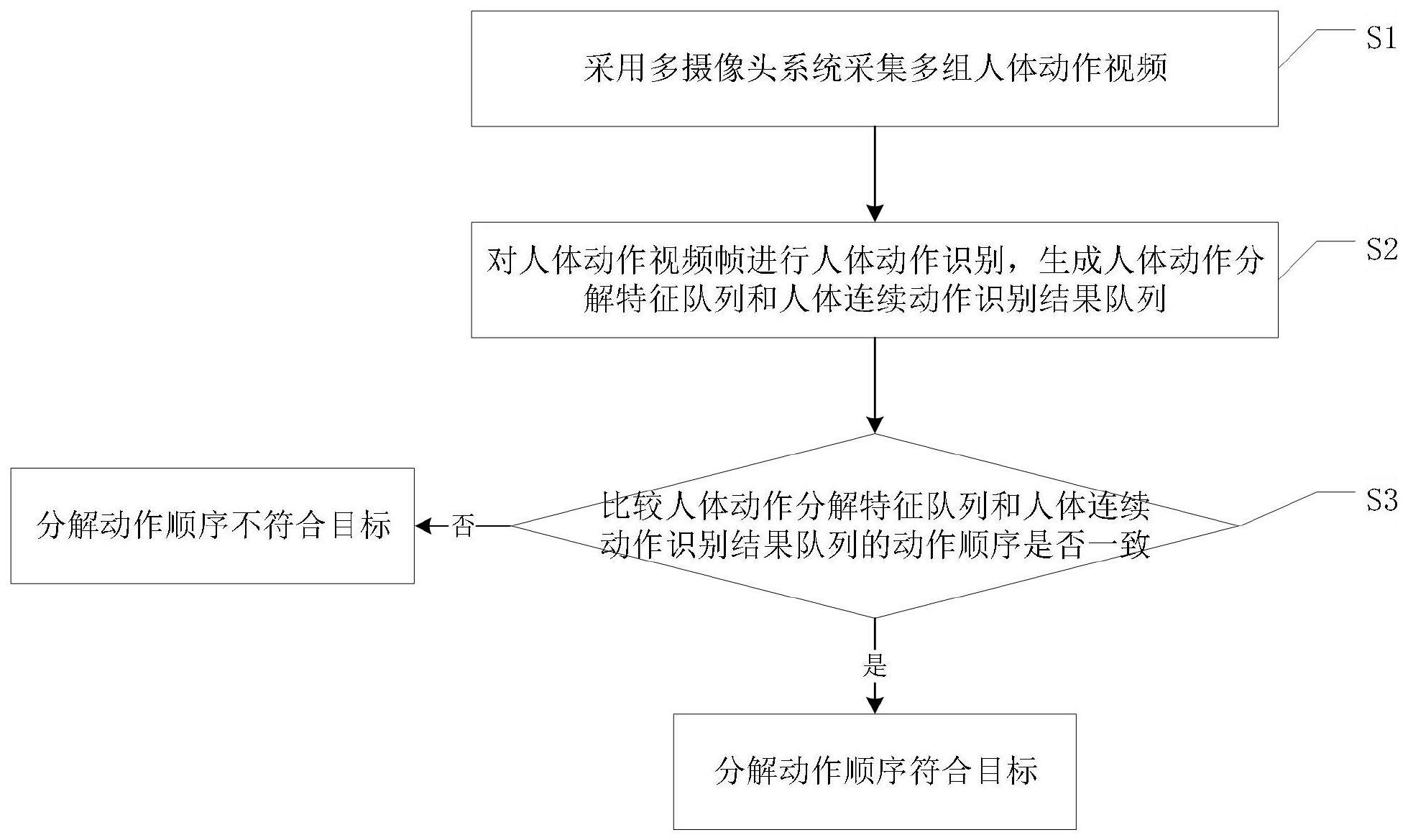
3、一种多摄像头人体动作识别方法,包括以下步骤:
4、采用多摄像头系统采集多组人体动作视频;
5、对人体动作视频帧进行人体动作识别,生成人体动作分解特征队列和人体连续动作识别结果队列;
6、比较人体动作分解特征队列和人体连续动作识别结果队列的动作顺序是否一致;若是,则分解动作顺序符合目标;否则分解动作顺序不符合目标。
7、进一步地,所述采用多摄像头系统采集多组人体动作图像之前包括:
8、采用标准启动时间法对多摄像头系统进行摄像时间同步,并在监控区域的中心点设置具有多个相等的标准长度边的标尺物;
9、将标尺物的标准长度边垂直于被测量摄像头的镜头轴线,分别在被测量摄像头的中心摄像头的监控视场内测量标尺物的多个相等边的像素数,以第一被测量的摄像头的标准长度边像素数为基准,各摄像头标准长度边像素数与第一被测量摄像头标准长度边像素数的比值作为摄像头关联系数;并记录标尺物的中心点坐标,分别作为各个摄像头的视场原点。
10、进一步地,所述对人体动作视频帧进行人体动作识别,生成人体动作分解特征队列和人体连续动作识别结果队列,具体包括以下步骤:
11、以间隔相同帧数的两帧的单关节位置像素位移作为动作主描述因素,根据单关节像素坐标、摄像头关联系数和摄像头的视场原点确定各个摄像头的关节点标准坐标;
12、基于关节点的二维坐标变动像素和变动比例生成人体单关节运动二维描述;
13、基于每个分解动作的起始时间点,根据人体动作包含各个关节点的人体单关节运动二维描述,生成人体分解动作二维描述;
14、根据人体连续动作分解的各个分解动作的人体分解动作二维描述,生成人体动作分解特征队列;
15、根据人体动作的动作时间生成人体连续动作识别结果队列。
16、进一步地,所述基于关节点的二维坐标变动像素和变动比例生成人体单关节运动二维描述,具体包括以下步骤:
17、选取各个摄像头的相同帧,根据起始帧的两个关节点的像素距离确定人体单关节运动的单关节终止点的标准位移;
18、选取各个摄像头的相同帧,根据起始帧的单关节起始点到单关节终止点的像素距离确定人体单关节运动的单关节终止点的像素位移;
19、根据人体关节点编号、人体运动起始时间点、人体运动终止时间点、人体单关节运动起始点坐标、人体单关节运动的单关节终止点的标准位移和人体单关节运动的单关节终止点的像素位移生成人体单关节运动二维描述。
20、进一步地,所述人体单关节运动二维描述具体表示为:
21、a(k0,t0,△t):{k0,camid,t0,△t,(x0,y0),(△stdx,△stdy),(△x,△y)}
22、其中,a(k0,t0,△t)表示人体关节点k0从起始时间点t0运动至终止时间点△t的二维描述,camid表示摄像头编号,(x0,y0)表示人体单关节运动起始点坐标,(△stdx,△stdy)表示人体单关节运动的单关节终止点的标准位移,(△x,△y)表示人体单关节运动的单关节终止点的像素位移。
23、进一步地,所述人体分解动作二维描述具体表示为:
24、actbase(t0):{a(k0,t0,△t),a(k1,t0,△t),...,a(k24,t0,△t)}
25、其中,actbase(t0)表示起始时间点t0的人体分解动作二维描述,a(k0,t0,△t)表示人体关节点k0从起始时间点t0运动至终止时间点△t的二维描述,a(k1,t0,△t)表示人体关节点k1从起始时间点t0运动至终止时间点△t的二维描述,a(k24,t0,△t)表示人体关节点k24从起始时间点t0运动至终止时间点△t的二维描述。
26、进一步地,所述人体动作分解特征队列具体表示为:
27、actarray:{actno,camid,actorder,actbase(t0)}
28、其中,actarray表示人体动作分解特征队列,actno表示分解动作编号,camid表示摄像头编号,actorder表示分解动作在连续动作中的顺序号,actbase(t0)表示起始时间点t0的人体分解动作二维描述。
29、进一步地,所述人体连续动作识别结果队列具体表示为:
30、actresult:{actno,actrealorder,acttime}
31、其中,actresult表示人体连续动作识别结果队列,actno表示分解动作编号,actrealorder表示人体连续动作识别的分解动作顺序号,acttime表示分解动作时间。
32、进一步地,所述比较人体动作分解特征队列和人体连续动作识别结果队列的动作顺序是否一致,具体包括:
33、将人体动作分解特征队列按照分解动作顺序进行排序,将人体连续动作识别结果队列按照动作识别顺序进行排序,比较人体动作分解特征队列的排序结果与人体连续动作识别结果队列的顺序结果是否一致。
34、本发明具有以下有益效果:
35、本发明提出了一种多摄像头人体动作识别方法,通过多个按照特定方法布置的摄像头,能够得到人体动作的无盲区的动作识别结果,一个动作的不同关节特征描述可以使用不同摄像头的标准化坐标进行描述,实现了动作关节特征的无盲区识别。
技术特征:
1.一种多摄像头人体动作识别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种多摄像头人体动作识别方法,其特征在于,所述采用多摄像头系统采集多组人体动作图像之前包括:
3.根据权利要求1所述的一种多摄像头人体动作识别方法,其特征在于,所述对人体动作视频帧进行人体动作识别,生成人体动作分解特征队列和人体连续动作识别结果队列,具体包括以下步骤:
4.根据权利要求3所述的一种多摄像头人体动作识别方法,其特征在于,所述基于关节点的二维坐标变动像素和变动比例生成人体单关节运动二维描述,具体包括以下步骤:
5.根据权利要求3所述的一种多摄像头人体动作识别方法,其特征在于,所述人体单关节运动二维描述具体表示为:
6.根据权利要求3所述的一种多摄像头人体动作识别方法,其特征在于,所述人体分解动作二维描述具体表示为:
7.根据权利要求3所述的一种多摄像头人体动作识别方法,其特征在于,所述人体动作分解特征队列具体表示为:
8.根据权利要求3所述的一种多摄像头人体动作识别方法,其特征在于,所述人体连续动作识别结果队列具体表示为:
9.根据权利要求1所述的一种多摄像头人体动作识别方法,其特征在于,所述比较人体动作分解特征队列和人体连续动作识别结果队列的动作顺序是否一致,具体包括:
技术总结
本发明公开了一种多摄像头人体动作识别方法,包括采用多摄像头系统采集多组人体动作视频;对人体动作视频帧进行人体动作识别,生成人体动作分解特征队列和人体连续动作识别结果队列;比较人体动作分解特征队列和人体连续动作识别结果队列的动作顺序是否一致,得到人体动作识别结果。本发明能够得到人体动作的无盲区的动作识别结果,一个动作的不同关节特征描述可以使用不同摄像头的标准化坐标进行描述,实现了动作关节特征的无盲区识别。
技术研发人员:孙纳新,王海波,席宇伟,卢权,付康民,王立斌,杨晓光,段轶男,张立东,李贺
受保护的技术使用者:国电电力发展股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!