一种操动机构箱底部异物检测方法及系统与流程
本发明涉及一种操动机构箱底部异物检测方法及系统,属于机构箱异物检测。
背景技术:
1、机构箱主要用于监测断路器中的电磁铁电流、行程、弹簧压力以及机构箱振动情况。现有的绝大多数机构箱在不打开机构箱门的情况下,只能观察到机构所处的状态,无法观察机构的动作过程。当某个传感器出现故障时,需人工打开机构箱进行检测并得出结论。其操作过程繁琐且存在一定的安全隐患,无法做到真正的机构装置全状态感知。
技术实现思路
1、本发明的目的是提供一种操动机构箱底部异物检测方法及系统,用以解决人工检测机构箱底部异物时操作过程繁琐且存在安全隐患的问题。
2、为实现上述目的,本发明所提供的技术方案和相应方案的有益效果包括:
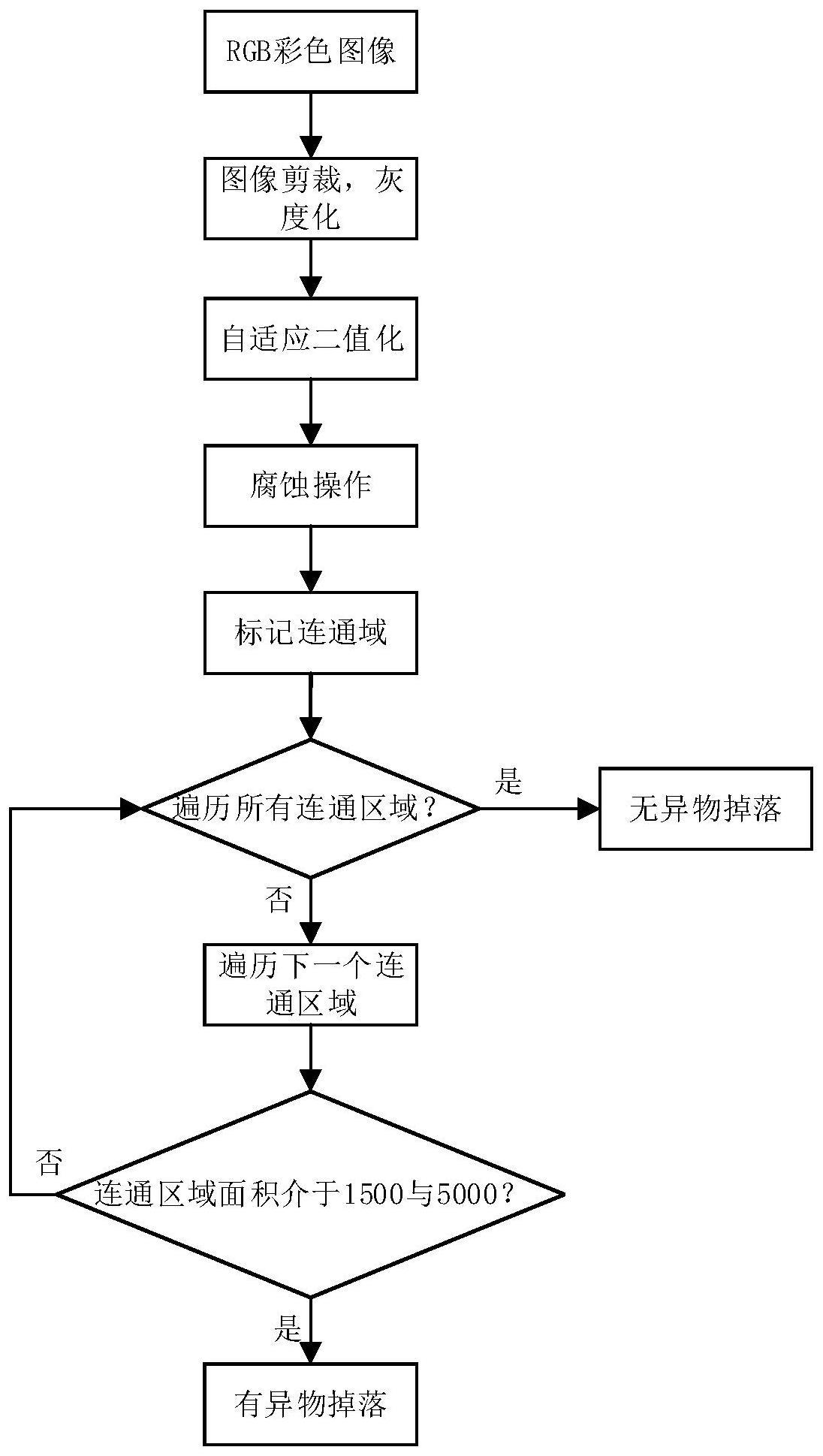
3、本发明的一种操动机构箱底部异物检测方法,获取操动机构箱内部底部灰度图像并对其进行二值化处理以得到操动机构箱底部二值化图像,确定操动机构箱底部二值化图像中的所有连通域,对所有连通域进行遍历,若存在某一连通域面积介于指定阈值范围内,则判定操动机构箱底部有异物掉落,否则判定没有异物掉落。
4、上述技术方案的有益效果为:当操动机构箱底部出现异物时,获取机构箱内部底部灰度图像并对其进行二值化处理,使其变为黑白两种颜色。通过对二值化图像中的所有连通域(一个连通域表示一个物体或部件)进行判定,若存在某一连通域面积介于指定阈值范围内,则判定操动机构箱底部有异物掉落,否则判定没有异物掉落。(例如:当存在物体掉落时,该物体在二值化图像中对应一个连通域,且该物体对应的连通域面积介于指定阈值范围内则判定该物体为异物)。采用此异物检测方法使得操动机构箱底部异物检测变得安全、自动化、方便快捷。
5、作为方法的进一步改进,所述指定阈值范围为1500-5000个像素。
6、上述技术方案的有益效果为:指定连通域阈值范围,对某一部件是否为异物进行判定,提高异物判断准确定。
7、作为方法的进一步改进,还需对得到的操动机构箱底部二值化图像进行腐蚀操作,以消除噪声以及小物体的干扰。
8、上述技术方案的有益效果为:获得操动机构箱底部二值化图像后,还可以对二值化图像进行腐蚀操作,使得二值化处理后的图像尽量无其他东西干扰,提高异物检测效率。
9、作为方法的进一步改进,采用如下方式中的任一种方式获得操动机构箱内部底部灰度图像:
10、方式一:获取操动机构箱内部可见光图像并对其进行裁剪操作以得到操动机构箱内部底部图像,对操动机构箱内部底部图像进行灰度化操作以得到操动机构箱内部底部灰度图像;
11、方式二:获取操动机构箱内部可见光图像并对其进行灰度化操作以得到操动机构箱内部灰度化图像,对操动机构箱内部灰度化图像进行裁剪操作以得到操动机构箱内部底部灰度图像。
12、本发明的一种操动机构箱底部异物检测系统,包括存储器和处理器,所述处理器用于执行存储在存储器中的计算机程序指令以实现如下机构箱底部异物检测方法:
13、获取操动机构箱内部底部灰度图像并对其进行二值化处理以得到操动机构箱底部二值化图像,确定操动机构箱底部二值化图像中的所有连通域,对所有连通域进行遍历,若存在某一连通域面积介于指定阈值范围内,则判定操动操动机构箱底部有异物掉落,否则判定没有异物掉落。
14、上述技术方案的有益效果为:当操动机构箱底部出现异物时,获取机构箱内部底部灰度图像并对其进行二值化处理,使其变为黑白两种颜色。通过对二值化图像中的所有连通域(一个连通域表示一个物体或部件)进行判定,若存在某一连通域面积介于指定阈值范围内,则判定操动机构箱底部有异物掉落,否则判定没有异物掉落。(例如:当存在物体掉落时,该物体在二值化图像中对应一个连通域,且该物体对应的连通域面积介于指定阈值范围内则判定该物体为异物)。采用此异物检测方法使得操动机构箱底部异物检测变得安全、自动化、方便快捷。
15、作为方案的进一步改进,所述指定阈值范围为1500-5000个像素。
16、上述技术方案的有益效果为:指定连通域阈值范围,对某一部件是否为异物进行判定,提高异物判断准确性。
17、作为方案的进一步改进,还需对得到的操动机构箱底部二值化图像进行腐蚀操作,以消除噪声以及小物体的干扰。
18、上述技术方案的有益效果为:获得操动机构箱底部二值化图像后,还可以对二值化图像进行腐蚀操作,使得二值化处理后的图像尽量无其他东西干扰,提高异物检测效率。
19、作为方案的进一步改进,采用如下方式中的任一种方式获得操动机构箱内部底部灰度图像:
20、方式一:获取操动机构箱内部可见光图像并对其进行裁剪操作以得到操动机构箱内部底部图像,对操动机构箱内部底部图像进行灰度化操作以得到操动机构箱内部底部灰度图像;
21、方式二:获取操动机构箱内部可见光图像并对其进行灰度化操作以得到操动机构箱内部灰度化图像,对操动机构箱内部灰度化图像进行裁剪操作以得到操动机构箱内部底部灰度图像。
技术特征:
1.一种操动机构箱底部异物检测方法,其特征在于,获取操动机构箱内部底部灰度图像并对其进行二值化处理以得到操动机构箱底部二值化图像,确定操动机构箱底部二值化图像中的所有连通域,对所有连通域进行遍历,若存在某一连通域面积介于指定阈值范围内,则判定操动机构箱底部有异物掉落,否则判定没有异物掉落。
2.根据权利要求1所述的操动机构箱底部异物检测方法,其特征在于,所述指定阈值范围为1500-5000个像素。
3.根据权利要求1或2所述的操动机构箱底部异物检测方法,其特征在于,还需对得到的操动机构箱底部二值化图像进行腐蚀操作,以消除噪声以及小物体的干扰。
4.根据权利要求1所述的操动机构箱底部异物检测方法,其特征在于,采用如下方式中的任一种方式获得操动机构箱内部底部灰度图像:
5.一种操动机构箱底部异物检测系统,其特征在于,包括存储器和处理器,所述处理器用于执行存储在存储器中的计算机程序指令以实现如下机构箱底部异物检测方法:
6.根据权利要求5所述的操动机构箱底部异物检测系统,其特征在于,所述指定阈值范围为1500-5000个像素。
7.根据权利要求5或6所述的操动机构箱底部异物检测系统,其特征在于,还需对得到的操动机构箱底部二值化图像进行腐蚀操作,以消除噪声以及小物体的干扰。
8.根据权利要求5所述的操动机构箱底部异物检测系统,其特征在于,采用如下方式中的任一种方式获得操动机构箱内部底部灰度图像:
技术总结
本发明涉及一种操动机构箱底部异物检测方法及系统,属于操动机构箱异物检测技术领域。判定操动机构底部是否存在异物,可通过获取操动机构箱内部底部灰度图像并对获取的灰度图像进行二值化处理操作,确定二值化图像中的所有连通域并对其进行遍历,若存在某一连通域面积介于指定阈值范围内,则判定操动机构箱底部有异物掉落,否则判定没有异物掉落。采用本机构箱内部异物检测方法,有助于设备运维人员根据图像以及异物检测结果对操动机构箱内部运行状况进行更加准确的评估。
技术研发人员:马栋良,张文涛,谭盛武,姚永其,张一茗,宋广民,朱振毅,李智超,李少华,李得祥,王子聪,何莉鹏,史超名,刘虎腾,段启超,罗帆,金喜洋
受保护的技术使用者:平高集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!