一种地面识别方法、装置、机器人和存储介质与流程
本公开涉及移动机器人识别,尤其涉及一种地面识别方法、装置、机器人和存储介质。
背景技术:
1、扫地机器人等自移动设备可自动执行清扫、拖地、吸尘等动作,因而获得了广泛的应用。在清洁过程中,自移动设备会实时检测当前工作路径中可能遇到的障碍物并执行相应的避障动作。
2、现有技术中,机器人避障常规的实现方式有激光雷达、超声波、碰撞传感器等。但现有的障碍物探测手段仅能满足障碍物探测的目的,不能对机器人行进过程中的路面材质进行识别。
技术实现思路
1、有鉴于此,本公开实施例提供一种地面识别方法、装置、机器人和存储介质,用以使机器人能够克服现有技术中尚未利用线激光识别地面材质的技术问题。
2、第一方面,本公开实施例提供一种地面识别方法,应用于配置有线激光发射器与图像采集装置的移动机器人,其特征在于,所述方法包括:
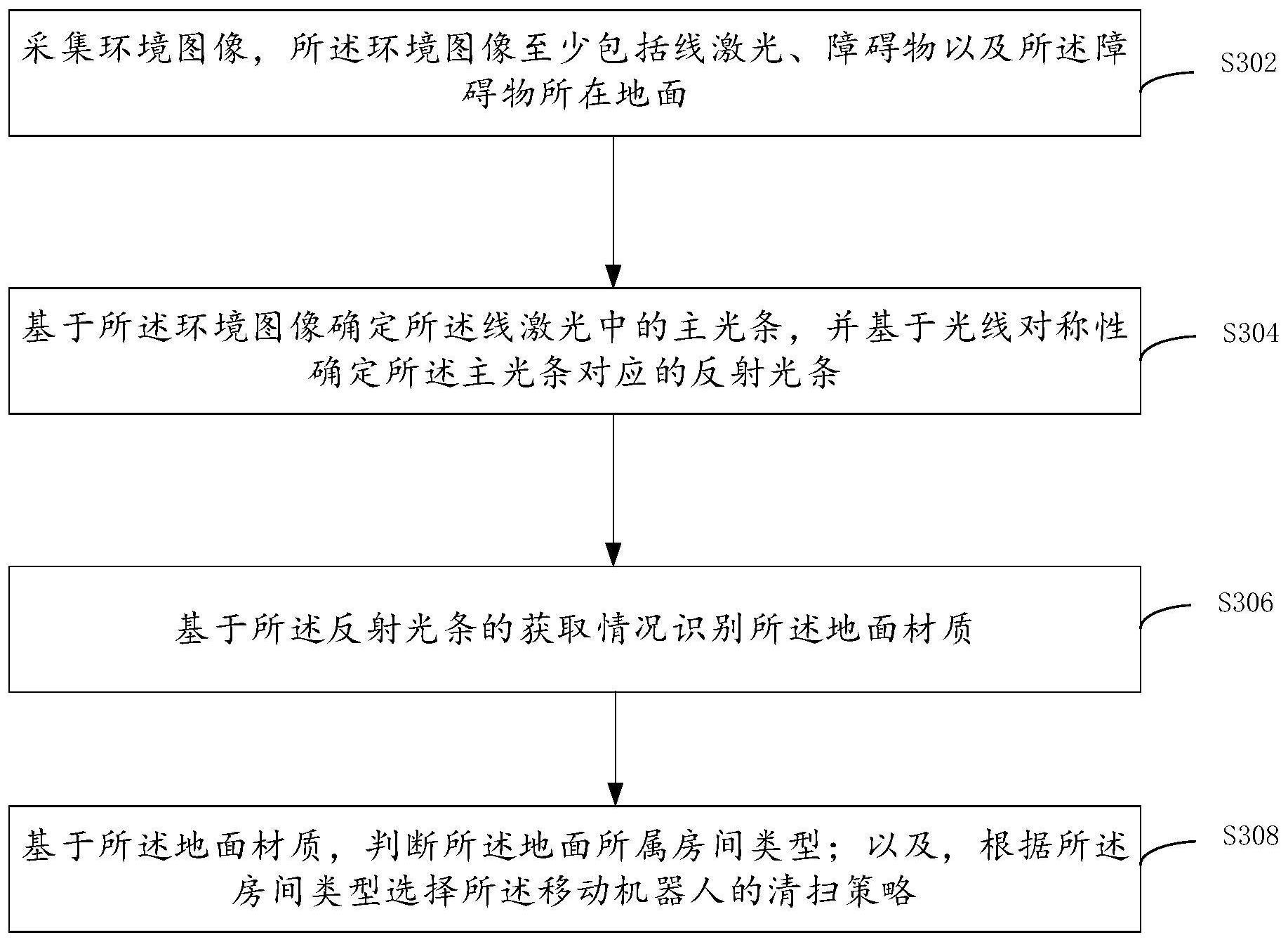
3、采集环境图像,所述环境图像至少包括线激光、障碍物以及所述障碍物所在的地面;
4、基于所述环境图像确定所述线激光中的主光条,并基于光线对称性确定所述主光条对应的反射光条;
5、基于所述反射光条的获取情况识别所述地面材质。
6、在一些实施例中,所述采集环境图像之前,包括:
7、通过所述线激光发射器发射至少一条竖向的非平行于所述地面的激光平面,每一所述激光平面形成一条与所述地面的交线以及一条与所述障碍物表面的交线。
8、在一些实施例中,所述基于所述环境图像确定所述线激光中的主光条,并基于光线对称性确定所述主光条对应的反射光条,包括:
9、确定所述一条与所述地面的交线以及一条与所述障碍物表面的交线为主光条;以及
10、确定与所述障碍物表面的主光条相对地面对称的光条为反射光条和/或确定与所述地面的主光条相对地面对称的光条为反射光条。
11、在一些实施例中,所述采集环境图像之前,包括:
12、通过所述线激光发射器发射至少一条横向的非平行于所述地面的激光平面,每一所述激光平面仅形成一条与所述地面的交线。
13、在一些实施例中,所述基于所述环境图像确定所述线激光中的主光条,并基于光线对称性确定所述主光条对应的反射光条,包括:
14、确定所述激光平面与所述地面的交线为主光条;
15、确定与所述主光条对称且位于所述障碍物表面的线激光为反射光条。
16、在一些实施例中,所述基于所述反射光条的获取情况识别所述地面材质,包括:
17、当存在所述反射光条时,则识别所述地面为强反射度地面材质或中反射度地面材质;或者,
18、当不存在所述反射光条时,则识别所述地面为弱反射地面材质;
19、其中,所述强反射度地面材质的反射度高于所述中反射度地面材质,所述中反射度地面材质的反射度高于所述弱反射地面材质。
20、在一些实施例中,所述当存在所述反射光条时,则识别所述地面为强反射度地面材质或中反射度地面材质,包括:
21、基于所述主光条与所述反射光条之间的亮度近似程度,获取所述反射光条的强弱类型,其中,所述亮度近似程度与所述反射光条的亮度强弱呈正向关系;
22、当所述反射光条的强弱类型为强反射光条,则识别所述地面为高反射度地面材质;或者,
23、当所述反射光条的强弱类型为弱反射光条,则识别所述地面为中反射度地面材质。
24、在一些实施例中,还包括:
25、基于所述地面材质,判断所述地面所属房间类型;以及
26、根据所述房间类型选择所述移动机器人的清扫策略。
27、第二方面,本公开实施例提供一种地面识别装置,应用于配置有线激光发射器与图像采集装置的移动机器人,包括:
28、采集单元,用于采集环境图像,所述环境图像至少包括线激光、障碍物以及所述障碍物所在的地面;
29、确定单元,用于基于所述环境图像确定所述线激光中的主光条,并基于光线对称性确定所述主光条对应的反射光条;
30、识别单元,用于基于所述反射光条的获取情况识别所述地面材质。
31、第三方面,本公开实施例提供一种机器人,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机程序指令,所述处理器执行所述计算机程序指令时,实现如上任一所述的方法步骤。
32、第四方面,本公开实施例提供一种非瞬时性计算机可读存储介质,存储有计算机程序指令,所述计算机程序指令在被处理器调用和执行时实现如上任一所述的方法步骤。
33、相对于现有技术,本发明至少具有以下技术效果:
34、本公开实施例提供一种地面识别方法、装置、机器人和存储介质,一方面,该地面识别方法利用线激光发出的激光平面与障碍物及地面的关系,在线激光实现避障功能的基础上增加地面识别功能,拓展线激光的应用功能;另一方面,所述线激光为红外光,可对光线较暗的场景进行地面识别,通过与ai图像识别进行互补,提高移动机器人在不同环境下的识别准确度。
技术特征:
1.一种地面识别方法,应用于配置有线激光发射器与图像采集装置的移动机器人,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述采集环境图像之前,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述环境图像确定所述线激光中的主光条,并基于光线对称性确定所述主光条对应的反射光条,包括:
4.根据权利要求1所述的方法,其特征在于,所述采集环境图像之前,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述环境图像确定所述线激光中的主光条,并基于光线对称性确定所述主光条对应的反射光条,包括:
6.根据权利要求1所述的方法,其特征在于,所述基于所述反射光条的获取情况识别所述地面材质,包括:
7.根据权利要求6所述的方法,其特征在于,所述当存在所述反射光条时,则识别所述地面为强反射度地面材质或中反射度地面材质,包括:
8.根据权利要求1所述的方法,其特征在于,还包括:
9.一种地面识别装置,应用于配置有线激光发射器与图像采集装置的移动机器人,其特征在于,包括:
10.一种机器人,包括处理器和存储器,其特征在于,所述存储器存储有能够被所述处理器执行的计算机程序指令,所述处理器执行所述计算机程序指令时,实现如权利要求1-8任一所述的方法步骤。
11.一种非瞬时性计算机可读存储介质,其特征在于,存储有计算机程序指令,所述计算机程序指令在被处理器调用和执行时实现如权利要求1-8任一所述的方法步骤。
技术总结
本公开实施例提供一种地面识别方法、装置、机器人及介质,所述方法应用于配置有线激光发射器与图像采集装置的移动机器人,包括:采集环境图像,所述环境图像至少包括线激光、障碍物以及所述障碍物所在的地面;基于所述环境图像确定所述线激光中的主光条,并基于光线对称性确定所述主光条对应的反射光条;基于所述反射光条的获取情况识别所述地面材质。本公开利用线激光识别地面材质,拓展了线激光的应用功能。
技术研发人员:王锐
受保护的技术使用者:北京石头创新科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!