手势识别方法、装置、计算机设备和存储介质与流程
本申请涉及图像处理,特别是涉及一种手势识别方法、装置、计算机设备和存储介质。
背景技术:
1、随着科学技术的发展,终端设备的种类不断扩展,终端所具备的功能也愈发多样化,虚拟现实(virtual reality)和增强现实(augmented reality)便是多样化功能的一部分。虚拟现实是利用计算机模拟环境,使用户沉浸到该环境中,增强现实是将虚拟信息进行模拟仿真后应用到真实世界的图像中,实现对真实世界的增强。虚拟现实和增强现实依赖于虚实交互,需要对声音、画面、文字、动作行为等进行识别。
2、传统技术中对手势进行识别,主要依赖于神经网络和机器学习,需要建立相对完备的手势样本集,并将其拆分成训练集和测试集进行机器学习,为了达到精准识别的效果,每一种手势的交互行为都需要大量的样本集进行训练,因而存在训练时间长、计算数据量大的问题。
3、基于此,传统技术的手势识别技术仍存在识别耗时长、计算数据量大的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够减少识别耗时和计算数据量的手势识别方法、装置、计算机设备和存储介质。
2、第一个方面,本实施例提供了一种手势识别方法,所述方法包括:
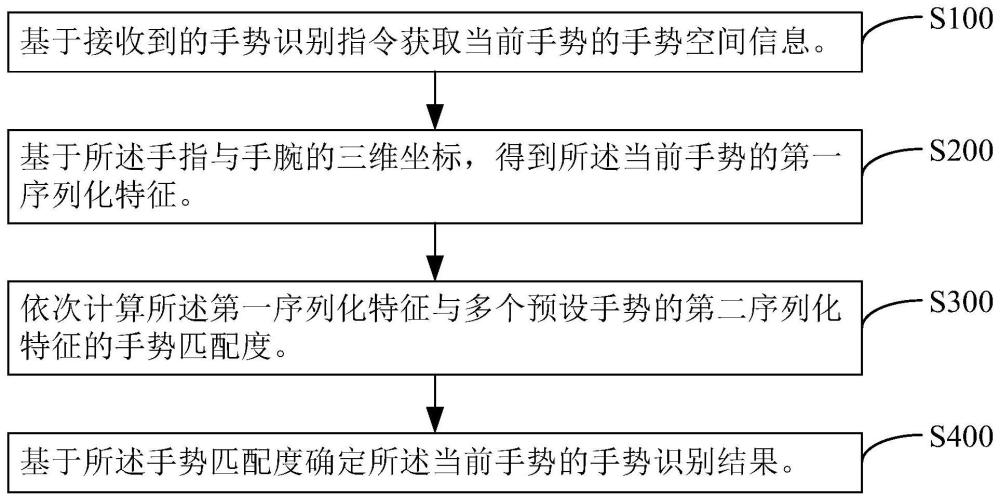
3、基于接收到的手势识别指令获取当前手势的手势空间信息;所述手势空间信息包括手指与手腕的三维坐标;
4、基于所述手指与手腕的三维坐标,得到所述当前手势的第一序列化特征;
5、依次计算所述第一序列化特征与多个预设手势的第二序列化特征的手势匹配度;
6、基于所述手势匹配度确定所述当前手势的手势识别结果。
7、在其中一个实施例中,所述基于接收到的手势识别指令获取当前手势的手势空间信息包括:
8、基于接收到的手势识别指令,获取图像采集装置所采集的深度图像;
9、基于所述深度图像识别所述当前手势的手部特征,所述手部特征包括手指和手腕的像素坐标;
10、基于所述像素坐标,确定所述手指和手腕的三维坐标。
11、在其中一个实施例中,所述手势包括静态手势,所述基于所述手指与手腕的三维坐标,得到所述当前手势的第一序列化特征包括:
12、基于所述手指与手腕的三维坐标,确定手指与手腕之间的多个特征点对;
13、计算多个所述特征点对的特征点距离;
14、基于多个所述特征点距离,确定所述静态手势的第一序列化特征。
15、在其中一个实施例中,所述第二序列化特征包括预设静态手势的第二序列化特征,所述依次计算所述第一序列化特征与多个预设手势的第二序列化特征的手势匹配度包括:
16、基于所述第一序列化特征与所述预设静态手势的第二序列化特征,确定多组特征点对的特征点距离差值;
17、基于所述特征点距离差值,计算多组特征点对的特征得分值;
18、根据所述多个特征点对的特征得分值,得到所述手势匹配度。
19、在其中一个实施例中,所述手势包括动态手势,所述基于所述手指与手腕的三维坐标,得到所述当前手势的第一序列化特征包括:
20、将任意一手指或手腕作为特征点,获取所述特征点在多个时刻的三维坐标;
21、基于所述特征点在多个时刻的三维坐标,计算所述特征点在多个相邻时刻内的特征点位移;
22、基于所述特征点位移,确定所述动态手势的第一序列化特征。
23、在其中一个实施例中,所述基于所述特征点位移,确定所述动态手势的第一序列化特征还包括:
24、基于所述动态手势的动作开始时间、动作结束时间以及所述相邻时刻的初始采样间隔,计算所述动态手势在多个所述相邻时刻内的归一化采样时刻和归一化采样间隔;
25、基于所述归一化采样时刻、归一化采样间隔、所述相邻时刻内的特征点位移、所述动态手势的特征点总位移,计算所述多个所述相邻时刻内的特征点归一化位移;
26、基于多个所述相邻时刻内的特征点归一化位移,得到所述动态手势的第一序列化特征。
27、在其中一个实施例中,所述第二序列化特征包括预设动态手势的第二序列化特征,所述依次计算所述第一序列化特征与多个预设手势的第二序列化特征的手势匹配度包括:
28、基于所述第一序列化特征与所述预设动态手势的第二序列化特征,确定多个特征点位移的特征点位移差值;
29、基于所述特征点位移差值,计算多个所述特征点位移的特征得分值;
30、根据多个所述特征点位移的特征得分值,得到所述手势匹配度。
31、第二个方面,本实施例提供了一种手势识别装置,所述装置包括:
32、获取模块,用于基于接收到的手势识别指令获取当前手势的手势空间信息;所述手势空间信息包括手指与手腕的三维坐标;
33、特征模块,用于基于所述手指与手腕的三维坐标,得到所述当前手势的第一序列化特征;
34、匹配模块,用于依次计算所述第一序列化特征与多个预设手势的第二序列化特征的手势匹配度;
35、确定模块,用于基于所述手势匹配度确定所述当前手势的手势识别结果。
36、第三个方面,本实施例提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如上述方法的步骤。
37、第四个方面,本实施例提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述方法的步骤。
38、上述手势识别方法、装置、计算机设备和存储介质,通过基于接收到的手势识别指令获取当前手势的手势空间信息;所述手势空间信息包括手指与手腕的三维坐标;基于所述手指与手腕的三维坐标,得到所述当前手势的第一序列化特征;依次计算所述第一序列化特征与多个预设手势的第二序列化特征的手势匹配度;基于所述手势匹配度确定所述当前手势的手势识别结果,作为一种无需神经网络或机器学习训练识别的手势识别方法,可以依据手指和手腕等特征的处理实现当前手势与预设手势的匹配,得到手势识别结果,可以减少识别耗时和计算数据量,达到提高手势识别速度和准确率的效果。
技术特征:
1.一种手势识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于接收到的手势识别指令获取当前手势的手势空间信息包括:
3.根据权利要求1所述的方法,其特征在于,所述手势包括静态手势,所述基于所述手指与手腕的三维坐标,得到所述当前手势的第一序列化特征包括:
4.根据权利要求3所述的方法,其特征在于,所述第二序列化特征包括预设静态手势的第二序列化特征,所述依次计算所述第一序列化特征与多个预设手势的第二序列化特征的手势匹配度包括:
5.根据权利要求1所述的方法,其特征在于,所述手势包括动态手势,所述基于所述手指与手腕的三维坐标,得到所述当前手势的第一序列化特征包括:
6.根据权利要求5所述的方法,其特征在于,所述基于所述特征点位移,确定所述动态手势的第一序列化特征还包括:
7.根据权利要求5所述的方法,其特征在于,所述第二序列化特征包括预设动态手势的第二序列化特征,所述依次计算所述第一序列化特征与多个预设手势的第二序列化特征的手势匹配度包括:
8.一种手势识别装置,其特征在于,所述装置包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至权利要求7中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至权利要求7中任一项所述的方法的步骤。
技术总结
本申请涉及一种手势识别方法、装置、计算机设备和存储介质。所述方法包括:基于接收到的手势识别指令获取当前手势的手势空间信息;所述手势空间信息包括手指与手腕的三维坐标;基于所述手指与手腕的三维坐标,得到所述当前手势的第一序列化特征;依次计算所述第一序列化特征与多个预设手势的第二序列化特征的手势匹配度;基于所述手势匹配度确定所述当前手势的手势识别结果。采用本方法能够依据手指和手腕等特征的处理实现当前手势与预设手势的匹配,无需神经网络或机器学习训练识别即可得到手势识别结果,达到提高手势识别速度和准确率的效果。
技术研发人员:林呈,李墨,王莹珑
受保护的技术使用者:武汉联影智融医疗科技有限公司
技术研发日:
技术公布日:2025/2/20
- 还没有人留言评论。精彩留言会获得点赞!