穴盘缺苗检测及取植苗控制系统
本发明属于蔬菜移栽种植,具体的说,涉及一种穴盘缺苗检测及取植苗控制系统。
背景技术:
1、随着科学技术的发展,设施农业机械化和智能化起了重大作用,尤其对于蔬菜移栽,为了更好的提高设施农业的发展,促进现代化农业优质高效的生产,减少人工损耗,我国开展了大量关于移栽种植机械的研究。
2、我国现有的蔬菜移栽种植是以人工移栽和半自动移栽为主,存在效率低下,耗时耗力等问题,因此我国多个地区开始标准化育苗,并采取全自动移栽方法。全自动作业中,包含育苗、挑苗、运输及取苗四个步骤,以上都将可能导致穴盘中钵苗的缺失,造成实地移栽出现缺苗现象,需进行二次补种作业。
3、公开号为cn103499313b提供的一种穴盘苗检测系统和方法,其通过从待测穴盘苗的正上方采集没有激光照射时穴盘苗的无激光图像和有从待测穴盘苗侧面照射穴盘苗的顶部的激光照射时穴盘苗的有激光图像,进而根据无激光图像计算出穴盘苗顶部的叶片的像素面积,根据有激光图像计算出待测穴盘苗的高度值,上述装置主要是针对穴盘内的叶苗的高度进行检测,但是无法在取苗的阶段针对于每个穴盘内的叶苗的缺失进行详细的检测。
4、因此,迫切需要提供一种能够精确、自动化检测单个穴盘内的叶苗是否缺失的装置。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、为解决上述的技术问题,本发明采用如下的技术方案。
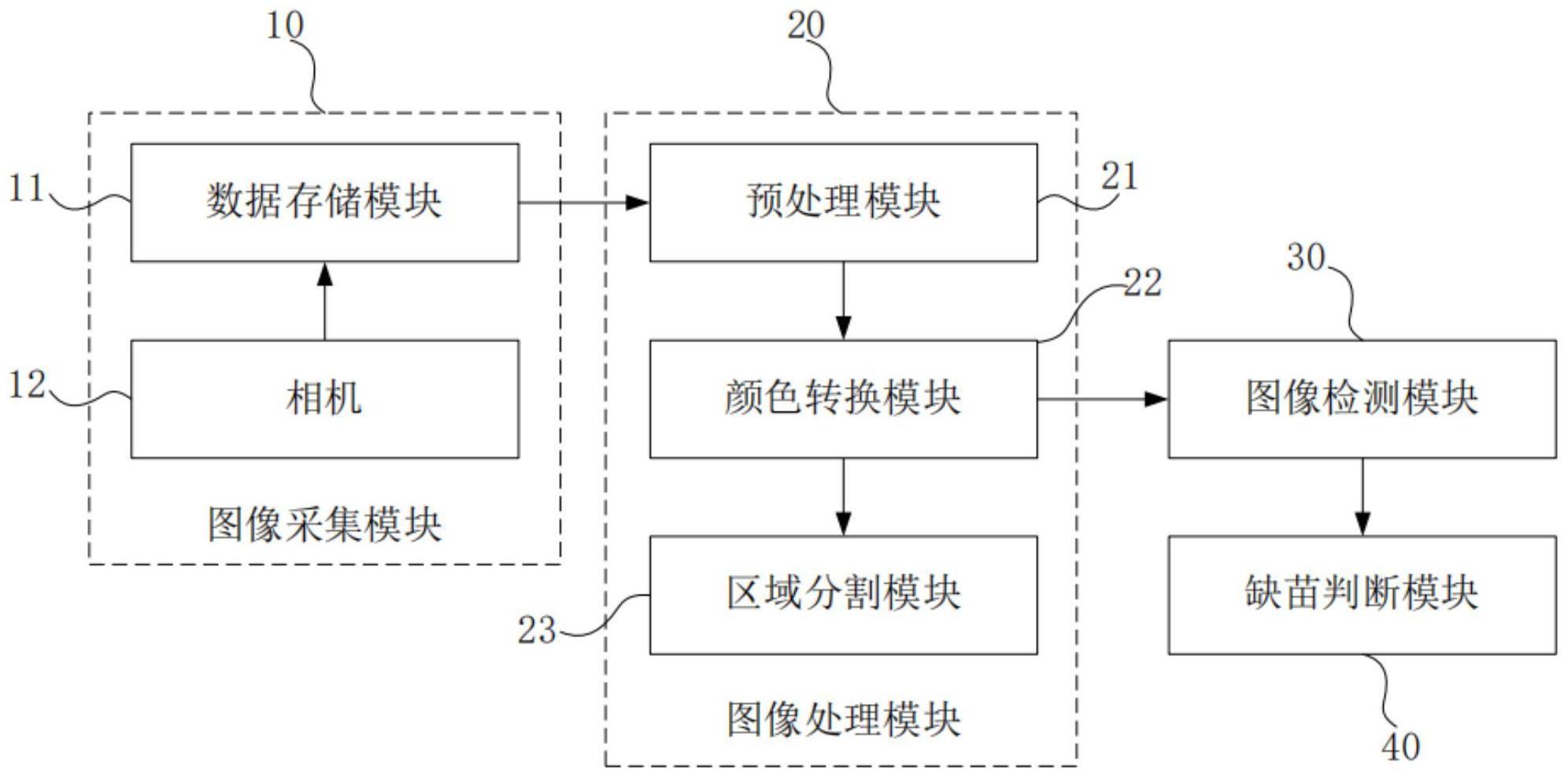
3、一种穴盘缺苗检测系统,包括图像采集模块、图像处理模块、图像检测模块和缺苗判断模块,其中:
4、所述图像采集模块包括相机和数据存储模块,所述图像采集模块实时采集穴盘的初始图像,并发送至数据存储模块进行存储;
5、所述图像处理模块包括预处理模块、颜色转换模块和区域分割模块,所述预处理模块对于初始图像进行裁切,保留穴盘的图像,并根据穴盘内钵苗和土壤的颜色进行色彩分割,所述颜色转换模块进行颜色空间转换,将色彩分割后的图像从rgb颜色空间转换为hsv颜色空间;
6、所述区域分割模块将对颜色空间转化后的三个通道图像中的饱和度图像进行阈值选取处理;
7、所述图像检测模块将处理后的图像与初始图像关联提取区域图像构成连通域,并对干扰区域进行分割,将穴盘的钵穴处的连通域选取出来,最后将所有的选取区域合并并再次与初始图像关联;
8、所述缺苗判断模块从关联图像中提取图像处理结果,根据提取的图像处理结果判断穴盘格内是否有无缺苗的位置,将有无缺苗的结果输出。
9、进一步的,所述预处理模块将初始图像进行roi裁剪图像,再对裁剪后的图像进行滤波处理,得到图像中边缘的梯度和方向,设定梯度阈值选择具有足够强度的边缘,过滤掉较弱的边缘,将各个边缘线段分为不同的连通区域,将非连续的边缘线段进行合并,形成一个完整的边缘图像,将得到边缘图像和初始图像结合。
10、进一步的,所述预处理模块采用在进行色彩分割时将边缘图像和初始图像结合的图像进行r、g、b分量分离转化为h、s、v分量形成三个图像,完成色彩分割。
11、进一步的,所述颜色转换模块将色彩分割后的图像从rgb颜色空间转换为hsv颜色空间所依据的公式为:
12、r’=r/255
13、g’=g/255
14、b’=b/255
15、cmax=max(r’,g’,b’)
16、cmmin=min(r’,g’,b’)
17、δ=cmax-cmmin
18、hsv颜色空间则从色度、饱和度和明度的计算公式分别为:
19、h计算:
20、
21、s计算:
22、
23、v计算:
24、v=cmax。
25、进一步的,所述区域分割模块设置颜色空间转换后的图像的像素点的灰度值阈值,将大于最小设定阈值的值和小于最大设定阈值的值作为结果输出。
26、进一步的,所述图像检测模块基于halcon图像处理软件构成,所述图像检测模块将处理后的图像中的每个子区域当作单独的连通区域,选择所需的子区域作为输出图像区域,再与初始图像一一映射,进行信息融合,完成图像的关联。
27、进一步的,所述缺苗判断模块提前测定一株最小合格苗的像素,设定有苗情况下像素数量为大于等于n,统计每个穴孔检测区域中像素数量,通过比较运算指令,比对每个穴孔检测区域像素数量,缺苗运算输出数值“0”,有苗运算输出数值“1”。
28、本发明另外还提供一种取植苗控制系统,所述取植苗控制系统包括缺苗检测系统、串口通讯模块、移动平台控制模块和取植苗控制模块,所述缺苗检测系统采用上述的一种穴盘缺苗检测系统,所述缺苗判断模块和移动平台控制模块、取植苗控制模块电性连接,用于将有无缺苗的结果发送至移动平台控制模块和取植苗控制模块,所述移动平台控制模块根据缺苗的结果控制取植苗装置的步进电机、轮毂电机以实现行走作业,取植苗控制模块根据缺苗的结果发出种苗的夹取和投放信号。
29、进一步的,所述取植苗控制系统还包括有串口通讯模块和遥控模块,所述串口通讯模块和移动平台控制模块、取植苗控制模块电性连接,用于接收遥控模块发出的控制指令,并发送至移动平台控制模块、取植苗控制模块。
30、相比于现有技术,本发明的有益效果为:
31、本发明使用图像采集模块采集种植有叶苗的穴盘的数据,然后对初始图像进行裁切,去除图像中的干扰,然后对图像的色彩进行分割,在原图基础上减去图片中的土壤信息数据,分割所得图像即可单独得到叶苗的图像,然后将图像从rgb颜色空间转换为hsv颜色空间,通过从色度、饱和度和明度3个方面对叶苗的颜色进行描述,获得叶苗直观的颜色模型,并将转换后的图像进行二值化处理,将整个图像呈现出明显的黑白效果,使图像中数据量大为减少,从而凸显出叶苗的轮廓,并将二值化处理后的图像与初始图像进行关联,进行信息融合,获取叶苗在穴盘内的综合信息,并对融合后的图像进行识别,能够根据识别结果针对于单个穴盘内是否缺苗的情况进行精准的检测和识别,通过检测结果快速统计缺苗位置,具有检测省力、快速、稳定等优点。
技术特征:
1.一种穴盘缺苗检测系统,其特征在于,包括图像采集模块(10)、图像处理模块(20)、图像检测模块(30)和缺苗判断模块(40):
2.根据权利要求1所述的一种穴盘缺苗检测系统,其特征在于,所述预处理模块(21)将初始图像进行roi裁剪图像,再对裁剪后的图像进行滤波处理,得到图像中边缘的梯度和方向,设定梯度阈值选择具有足够强度的边缘,过滤掉较弱的边缘,将各个边缘线段分为不同的连通区域,将非连续的边缘线段进行合并,形成一个完整的边缘图像,将得到边缘图像和初始图像结合。
3.根据权利要求2所述的一种穴盘缺苗检测系统,其特征在于,所述预处理模块(21)采用在进行色彩分割时将边缘图像和初始图像结合的图像进行r、g、b分量分离转化为h、s、v分量形成三个图像,完成色彩分割。
4.根据权利要求3所述的一种穴盘缺苗检测系统,其特征在于,所述颜色转换模块(22)将色彩分割后的图像从rgb颜色空间转换为hsv颜色空间所依据的公式为:
5.根据权利要求1所述的一种穴盘缺苗检测系统,其特征在于,所述区域分割模块(23)设置颜色空间转换后的图像的像素点的灰度值阈值,将大于最小设定阈值的值和小于最大设定阈值的值作为结果输出。
6.根据权利要求1所述的一种穴盘缺苗检测系统,其特征在于,所述图像检测模块(30)基于halcon图像处理软件构成,所述图像检测模块(30)将处理后的图像中的每个子区域当作单独的连通区域,选择所需的子区域作为输出图像区域,再与初始图像一一映射,进行信息融合,完成图像的关联。
7.根据权利要求1所述的一种穴盘缺苗检测及取植苗控制系统,其特征在于,所述缺苗判断模块(40)提前测定一株最小合格苗的像素,设定有苗情况下像素数量为大于等于n,统计每个穴孔检测区域中像素数量,通过比较运算指令,比对每个穴孔检测区域像素数量,缺苗运算输出数值“0”,有苗运算输出数值“1”。
8.一种取植苗控制系统,其特征在于,所述取植苗控制系统包括缺苗检测系统、串口通讯模块、移动平台控制模块和取植苗控制模块,所述缺苗检测系统采用权利要求1-7任一项所述的一种穴盘缺苗检测系统,所述缺苗判断模块(40)和移动平台控制模块、取植苗控制模块电性连接,用于将有无缺苗的结果发送至移动平台控制模块和取植苗控制模块,所述移动平台控制模块根据缺苗的结果控制取植苗装置的步进电机、轮毂电机以实现行走作业,取植苗控制模块根据缺苗的结果发出种苗的夹取和投放信号。
9.根据权利要求8所述的一种取植苗控制系统,其特征在于,所述取植苗控制系统还包括有串口通讯模块和遥控模块,所述串口通讯模块和移动平台控制模块、取植苗控制模块电性连接,用于接收遥控模块发出的控制指令,并发送至移动平台控制模块、取植苗控制模块。
技术总结
本发明公开了一种穴盘缺苗检测及取植苗控制系统,本发明使用图像采集模块采集种植有叶苗的穴盘的数据,然后对初始图像进行裁切,去除图像中的干扰,然后对图像的色彩进行分割,在原图基础上减去图片中的土壤信息数据,分割所得图像即可单独得到叶苗的图像,然后将图像从RGB颜色空间转换为HSV颜色空间,通过从色度、饱和度和明度3个方面对叶苗的颜色进行描述,并将转换后的图像进行二值化处理,将整个图像呈现出明显的黑白效果,凸显出叶苗的轮廓,并将二值化处理后的图像与初始图像进行关联,进行信息融合,对融合后的图像进行识别,能够根据识别结果针对于单个穴盘内是否缺苗的情况进行精准的检测和识别,通过检测结果快速统计缺苗位置。
技术研发人员:陈逸津,俞高红,徐惠民,李小琴
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!