多传感器目标的匹配方法、装置、设备、移动工具及介质与流程
本申请涉及自动驾驶,尤其涉及一种多传感器目标的匹配方法、装置、设备、移动工具及介质。
背景技术:
1、近年来自动驾驶汽车一直是热门研究方向,目前车辆控制方向已经比较成熟,仅仅依靠单一传感器的信息无法满足自动驾驶的需求,并且单一传感器的信息的准确性无法判断,因此多传感器成为自动驾驶主流的选择,但是多个传感器之间的信息如何正确地融合也成为大家的关注焦点。
2、现有技术中,如果将毫米波目标映射到视觉图像目标上去匹配的话精度较低,如果将视觉图像目标映射到自车坐标系上跟毫米波目标匹配的话,一旦车辆颠簸抖动便很难匹配,所以毫米波目标和视觉图像目标匹配存在较大误差。
3、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本申请提供了一种多传感器目标的匹配方法、装置、设备、移动工具及介质,以解决上述毫米波目标和视觉图像目标匹配存在较大误差的技术问题。
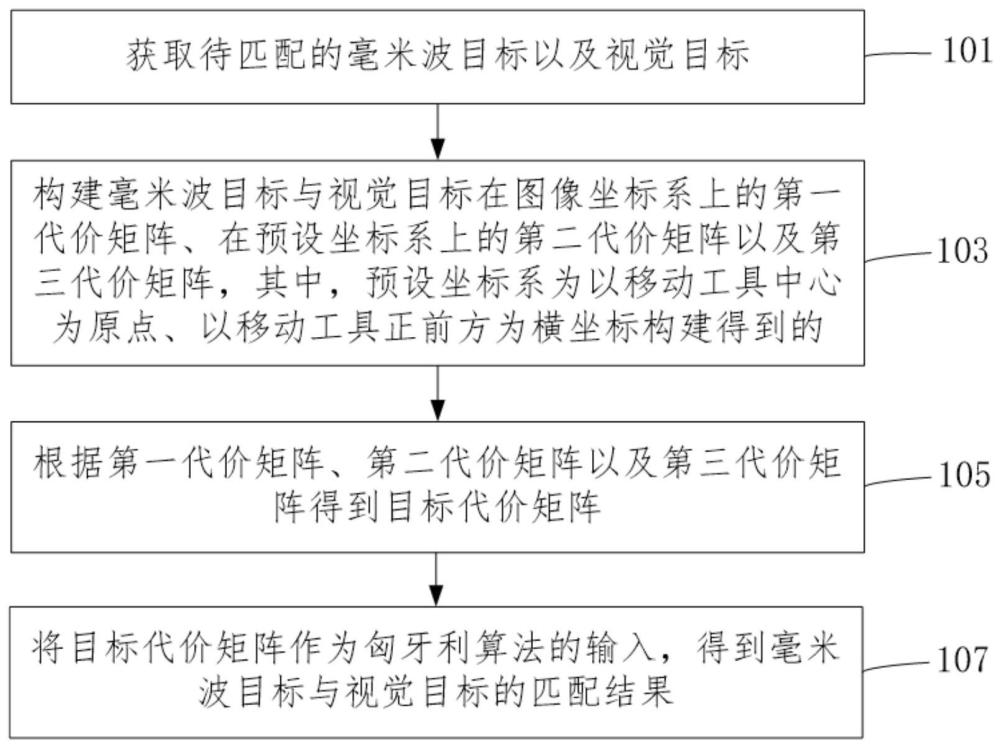
2、根据本申请实施例的一个方面,本申请提供了一种多传感器目标的匹配方法,包括:获取待匹配的毫米波目标以及视觉目标;构建毫米波目标与视觉目标在图像坐标系上的第一代价矩阵、在预设坐标系上的第二代价矩阵以及第三代价矩阵,其中,预设坐标系为以移动工具中心为原点、以移动工具正前方为横坐标构建得到的;根据第一代价矩阵、第二代价矩阵以及第三代价矩阵得到目标代价矩阵;将目标代价矩阵作为匈牙利算法的输入,得到毫米波目标与视觉目标的匹配结果。
3、可选地,构建毫米波目标与视觉目标在图像坐标系上的第一代价矩阵,具体包括:将毫米波目标映射至图像坐标系上,得到第一坐标;根据视觉目标对第一坐标进行修正,得到第二坐标;利用第二坐标以及视觉目标在图像坐标系上的第三坐标构建第一代价矩阵。
4、可选地,构建毫米波目标与视觉目标在预设坐标系上的第二代价矩阵,具体包括:将视觉目标映射至预设坐标系上,得到第四坐标;根据第四坐标以及毫米波目标在预设坐标系上的第五坐标,计算视觉目标与毫米波目标的第一位置距离、速度差以及航向偏差;根据第一位置距离、速度差以及航向偏差构建第二代价矩阵。
5、可选地,构建毫米波目标与视觉目标在预设坐标系上的第三代价矩阵,具体包括:获取毫米波目标与视觉目标在预设坐标系上的历史轨迹;确定毫米波目标在历史轨迹上的预设帧的第六坐标,以及确定视觉目标在历史轨迹上的预设帧的第七坐标,其中,预设帧为距离当前时刻最近的预设数量的帧;根据第六坐标以及第七坐标计算毫米波目标与视觉目标在每一帧的第二位置距离,并利用多个第二位置距离构建第三代价矩阵。
6、可选地,根据第一代价矩阵、第二代价矩阵以及第三代价矩阵得到目标代价矩阵,具体包括:对第一代价矩阵、第二代价矩阵以及第三代价矩阵进行归一化处理,分别得到第四代价矩阵、第五代价矩阵以及第六代价矩阵;分别赋予第四代价矩阵、第五代价矩阵以及第六代价矩阵权重值;将赋予权重值后的第四代价矩阵、第五代价矩阵以及第六代价矩阵相加,得到目标代价矩阵。
7、可选地,在得到毫米波目标与视觉目标的匹配结果之后,所述方法还包括:若匹配结果指示毫米波目标与视觉目标匹配,则将毫米波目标的第一标识与视觉目标的第二标识绑定,以及将毫米波目标与视觉目标标记为强匹配状态;计算毫米波目标与视觉目标之间的第三位置距离,并将第三位置距离与预设距离进行比对;根据比对结果调整毫米波目标与视觉目标的匹配系数;在匹配系数调整为预置取值的情况下,将毫米波目标与视觉目标解绑。
8、根据本申请实施例的另一方面,本申请提供了一种多传感器目标的匹配装置,包括:获取模块,用于获取待匹配的毫米波目标以及视觉目标;构建模块,用于构建毫米波目标与视觉目标在图像坐标系上的第一代价矩阵、在预设坐标系上的第二代价矩阵以及第三代价矩阵,其中,预设坐标系为以移动工具中心为原点、以移动工具正前方为横坐标构建得到的;处理模块,用于根据第一代价矩阵、第二代价矩阵以及第三代价矩阵得到目标代价矩阵;匹配模块,用于将目标代价矩阵作为匈牙利算法的输入,得到毫米波目标与视觉目标的匹配结果。
9、根据本申请实施例的另一方面,本申请提供了一种电子设备,包括存储器、处理器、通信接口及通信总线,存储器中存储有可在处理器上运行的计算机程序,存储器、处理器通过通信总线和通信接口进行通信,处理器执行计算机程序时实现上述方法的步骤。
10、根据本申请实施例的另一方面,本申请提供了一种移动工具,包括上述电子设备。
11、根据本申请实施例的另一方面,本申请还提供了一种具有处理器可执行的非易失的程序代码的计算机可读介质,程序代码使处理器执行上述的方法。
12、本申请实施例提供的上述技术方案与相关技术相比具有如下优点:
13、本申请通过一种多传感器目标的匹配方法,包括:获取待匹配的毫米波目标以及视觉目标;构建毫米波目标与视觉目标在图像坐标系上的第一代价矩阵、在预设坐标系上的第二代价矩阵以及第三代价矩阵,其中,预设坐标系为以移动工具中心为原点、以移动工具正前方为横坐标构建得到的;根据第一代价矩阵、第二代价矩阵以及第三代价矩阵得到目标代价矩阵;将目标代价矩阵作为匈牙利算法的输入,得到毫米波目标与视觉目标的匹配结果。通过构建毫米波目标和视觉目标的多个代价矩阵,然后根据多个代价矩阵得到最准确的目标代价矩阵,最后将目标代价矩阵作为匈牙利算法的输入,得到匹配结果,以减小毫米波目标和视觉图像目标匹配的误差。
技术特征:
1.一种多传感器目标的匹配方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述构建所述毫米波目标与所述视觉目标在图像坐标系上的第一代价矩阵,具体包括:
3.根据权利要求1所述的方法,其特征在于,所述构建所述毫米波目标与所述视觉目标在预设坐标系上的第二代价矩阵,具体包括:
4.根据权利要求3所述的方法,其特征在于,所述构建所述毫米波目标与所述视觉目标在预设坐标系上的第三代价矩阵,具体包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述第一代价矩阵、所述第二代价矩阵以及所述第三代价矩阵得到目标代价矩阵,具体包括:
6.根据权利要求1所述的方法,其特征在于,在得到所述毫米波目标与所述视觉目标的所述匹配结果之后,所述方法还包括:
7.一种多传感器目标的匹配装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器、通信接口及通信总线,所述存储器中存储有可在所述处理器上运行的计算机程序,所述存储器、所述处理器通过所述通信总线和所述通信接口进行通信,其特征在于,所述处理器执行所述计算机程序时实现上述权利要求1至6任一项所述方法的步骤。
9.一种移动工具,其特征在于,包括如权利要求8所述的电子设备。
10.一种具有处理器可执行的非易失的程序代码的计算机可读介质,其特征在于,所述程序代码使所述处理器执行所述权利要求1至6任一所述方法。
技术总结
本申请涉及一种多传感器目标的匹配方法、装置、设备、移动工具及介质,其中,方法包括:获取待匹配的毫米波目标以及视觉目标;构建毫米波目标与视觉目标在图像坐标系上的第一代价矩阵、在预设坐标系上的第二代价矩阵以及第三代价矩阵;根据第一代价矩阵、第二代价矩阵以及第三代价矩阵得到目标代价矩阵;将目标代价矩阵作为匈牙利算法的输入,得到毫米波目标与视觉目标的匹配结果。通过构建毫米波目标和视觉目标的多个代价矩阵,然后根据多个代价矩阵得到最准确的目标代价矩阵,最后将目标代价矩阵作为匈牙利算法的输入,得到匹配结果,以减小毫米波目标和视觉图像目标匹配的误差。
技术研发人员:王祥
受保护的技术使用者:武汉智行者科技有限公司
技术研发日:
技术公布日:2025/2/24
- 还没有人留言评论。精彩留言会获得点赞!