一种基于图像的底床剪切应力计算方法
本发明涉及一种基于图像的底床剪切应力计算方法,更具体地说是涉及一种测量三维表面流速,基于湍动能法(tke)计算底床剪切应力的方法,属于计算机视觉技术与流体动力学技术交叉领域。
背景技术:
1、在河口海岸工程中,常常会面临岸滩侵蚀、岸线演变、航道淤积、建筑物底部淘刷等涉及泥沙起动和输运的问题,而底床剪切应力是泥沙起动、输运的主要驱动力,是水动力和泥沙输移模型中的关键参数。底床剪切应力的准确计算对河口海岸地区的泥沙输移、水下地形地貌演变及底床侵蚀淤积速率研究十分重要。因此,计算底床剪切应力显得格外重要。
2、我国东临广阔的太平洋,每年夏季东南沿海地区易受台风侵袭,是世界上遭受海洋灾害影响最严重的国家之一,而风暴潮则是我国东南沿海地区共同面临的最主要的海洋灾害。风暴潮易造成海岸带侵蚀等灾害,这已成为岸滩资源和人民生命财产安全保护面临的一个普遍问题。但由于风暴潮期间海面异常升降,近岸海浪运动剧烈,无法对底床剪切应力进行直接测量,间接计算则需要先测得水底边界层中的速度分布,获取其脉动流速,然后结合系列理论公式计算得到底床剪切应力,而风暴潮期间较难对速度分布进行直接测量,尤其是水底边界层的速度分布,但表面流速的测量易于实现。因此,亟需找到一种根据风暴潮过程中海浪表面流速的非接触式测量结果,计算底床剪切应力的方法。
3、在海岸带区域,由于波浪、水流等作用引起的底床剪切应力超过底床泥沙的起动应力时,就会发生泥沙的起动与输移,会造成岸滩的冲淤演变,这对海岸带资源开发和海岸工程建设都有重要影响,关于底床剪切应力计算方法的研究已成为近年来的研究热点。例如申请日为2020年4月27日,专利号为cn202010342227.x的中国发明专利公开了一种估算矩形河渠壁面和床面切应力的方法,该方法在光滑矩形河渠平均边壁切应力计算中考虑断面形态和宽深比的综合影响,利用水的比重、河宽、湿周和水力坡度分别计算边壁和床面平均切应力,有利于提高光滑矩形河渠壁面和床面平均切应力计算的精度和准确性。但这种方法仍存在以下缺陷:(1)该方法实地测量的参数较多,且不利于河道在长期演变中的研究;(2)该方法应用背景为水槽实验,且仅针对矩形河渠进行研究,有一定的局限性;(3)该方法研究床面为光滑床面,但实际的河流、海岸带区域几乎不存在光滑床面的情况;(4)该方法基于恒定均匀流条件,并未考虑风暴潮等极端情况下的底床剪切应力测量。
4、总的来说,在风暴潮等极端天气下,海岸带区域的底床剪切应力的计算对研究风暴潮前后海岸带区域的岸线地形变化、岸滩资源的开发和利用等具有重要意义,但目前还缺少相关的技术与方法。如何准确且简洁地计算海岸带区域的底床剪切应力是一个亟需解决的问题。
技术实现思路
1、本发明针对现有技术的不足,提供了一种基于图像的底床剪切应力计算方法。
2、本发明包括如下步骤:
3、(1)图像采集与传输
4、采用两台图像采集设备,对风暴潮期间海岸带区域的海浪进行实时监测;
5、分别采集并通过无线网络传输视频,得到对应的两组图像;
6、(2)图像匹配
7、通过图像匹配算法实现两幅图像像素坐标点的精确匹配,使两组图像中的像素点坐标准确对应于同个三维空间点的坐标;
8、(3)三维信息重建,获取三维散点坐标;
9、(4)获取海浪的三维表面流速;
10、(5)求解海浪表面的湍动能;
11、(6)求解底床剪切应力。
12、进一步说,所述的图像采集设备采用高清摄像机,在得到对应的两组图像后,进行镜头光学畸变校正,进而输出摄像机主点位置,畸变系数,相机内参矩阵和外参矩阵。
13、进一步说,还包括摄像机标定步骤,分别对两台摄像头消除镜头光学畸变后,采用直接线性变换(dlt)理论进行标定。
14、进一步说,步骤(4)采用大尺度粒子图像测速技术(lspiv)来获取海浪的三维表面流速。
15、进一步说,步骤(5)具体是:基于海浪三维表面流速,求解其脉动流速,并计算出海浪表面湍动能。
16、进一步说,步骤(6)具体是:根据所得的海浪表面湍动能,基于湍动能法求解底床剪切应力。
17、本发明的有益效果:
18、(1)该方法为非接触式测量,对海浪运动不造成影响,且有利于实现对海岸带区域底床剪切应力变化的长期监测;
19、(2)该方法应用背景广,较为经济且受天气影响小,可以实现包括小型河流与近岸区域在内的多种不规则区域的底床剪切应力计算,不受床面粗糙度等因素影响,能实现风暴潮等极端情况下海岸带区域的底床剪切应力测量;
20、(3)该方法可经过插值获取各个点处的三维坐标,从而得到指定位置的三维表面流速,则可获取不同位置的底床剪切应力,有利于未来深入探明底床剪切应力对海岸带区域地形岸线变化的作用机理。
技术特征:
1.一种基于图像的底床剪切应力计算方法,其特征在于,该方法包括如下步骤:
2.根据权利要求1所述的一种基于图像的底床剪切应力计算方法,其特征在于:所述的图像采集设备采用两台高清摄像机,在得到对应的两组图像后,进行镜头光学畸变校正,进而输出摄像机主点位置,畸变系数,相机内参矩阵和外参矩阵。
3.根据权利要求2所述的一种基于图像的底床剪切应力计算方法,其特征在于:还包括摄像机标定步骤,分别对两台摄像头消除镜头光学畸变后,采用直接线性变换理论进行标定。
4.根据权利要求1所述的一种基于图像的底床剪切应力计算方法,其特征在于:步骤(4)采用基于大尺度粒子图像测速技术来获取海浪的三维表面流速。
5.根据权利要求4所述的一种基于图像的底床剪切应力计算方法,其特征在于:步骤(4)具体是:根据步骤(2)处理后的左右图像,分别在前一帧的查询区域和后一帧的搜索区域间进行相关分析,相关系数最大的2个窗口对应最可能的位移δs,位移δs除以对应的时间间隔δt便得出速度矢量,即可获取海浪的三维表面流速。
6.根据权利要求1所述的一种基于图像的底床剪切应力计算方法,其特征在于:步骤(5)具体是:基于海浪三维表面流速,求解其脉动流速,并计算出海浪表面湍动能。
7.根据权利要求1所述的一种基于图像的底床剪切应力计算方法,其特征在于:步骤(6)具体是:根据所得的海浪表面湍动能,基于湍动能法求解底床剪切应力。
技术总结
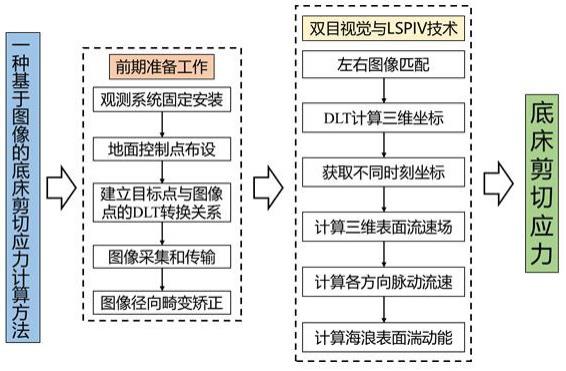
本发明公开了一种基于图像的底床剪切应力计算方法。首先在合适位置架设一套双目视觉视频观测系统,即使用两台高清摄像机拍摄海浪,包括控制模块、图像采集模块;随后对摄像机进行标定,消除镜头光学畸变并建立二维图像坐标和三维空间坐标之间的转换关系;接着对采集并传输的图像进行图像匹配,获取目标区域各点的三维空间坐标;再基于大尺度粒子图像测速与双目视觉技术计算获取三维表面流速;通过所获取的三维表面流速求解海浪表面的湍动能。最后根据计算所得的湍动能,基于湍动能法求解出底床剪切应力。本发明为非接触式测量,对海浪运动不造成影响,且有利于实现对海岸带区域底床剪切应力变化的长期监测。
技术研发人员:贺治国,叶一群,林颖典
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!