一种目标跟踪方法、装置、设备及介质与流程
本说明书涉及目标跟踪,尤其涉及一种目标跟踪方法。
背景技术:
1、目前,智能交通已经成为人们广泛接收的概念,自动驾驶是其重要的领域之一,通常利用路侧感知设备或自动驾驶车辆上搭载的传感器检测目标,得到目标的运动状态,然后针对上述检测到的目标进行有效的预测、跟踪,以便于根据上述预测、跟踪结果生成自动驾驶车辆的自动驾驶策略,避免发生交通事故。
2、现有技术中,针对路侧感知设备或车载传感器检测到的多目标进行跟踪的方法通常采用基于检测的多目标跟踪方法(tracking-by-detecton,英文简称,tbd),基于检测的多目标跟踪方法有sort、deepsort、bytetrack等算法,上述算法主要包括两部分,首先基于卡尔曼滤波算法根据当前时刻的目标的运动信息预测目标在下一时刻的运动状态,然后利用匈牙利算法将预测得到的目标的运动状态与路侧感知设备或车载传感器检测到的目标的运动状态进行匹配,在实际应用过程中,sort、deepsort、bytetrack等的跟踪算法中预测目标当前时刻的运动状态,通常会将目标的运动状态近似假设为匀速直线运动,然后利用匀速直线运动模型预测目标在下一时刻的运动状态,由于该假设条件很多场景下是一种近似处理,未考虑目标多变的运动状态,因此,在预测时可能出现误差,导致预测不准确,从而导致在进行目标匹配融合时的不准确,进而导致目标的跟踪结果不准确。
3、基于此,如何提供一种目标跟踪方法以提高目标跟踪结果的准确性,成为亟待解决的技术问题。
技术实现思路
1、本说明书实施例提供一种目标跟踪方法、装置、设备及介质,以提升针对目标跟踪结果的准确性。
2、为解决上述技术问题,本说明书实施例是这样实现的:
3、本说明书实施例提供的一种目标跟踪方法,所述方法可以包括:
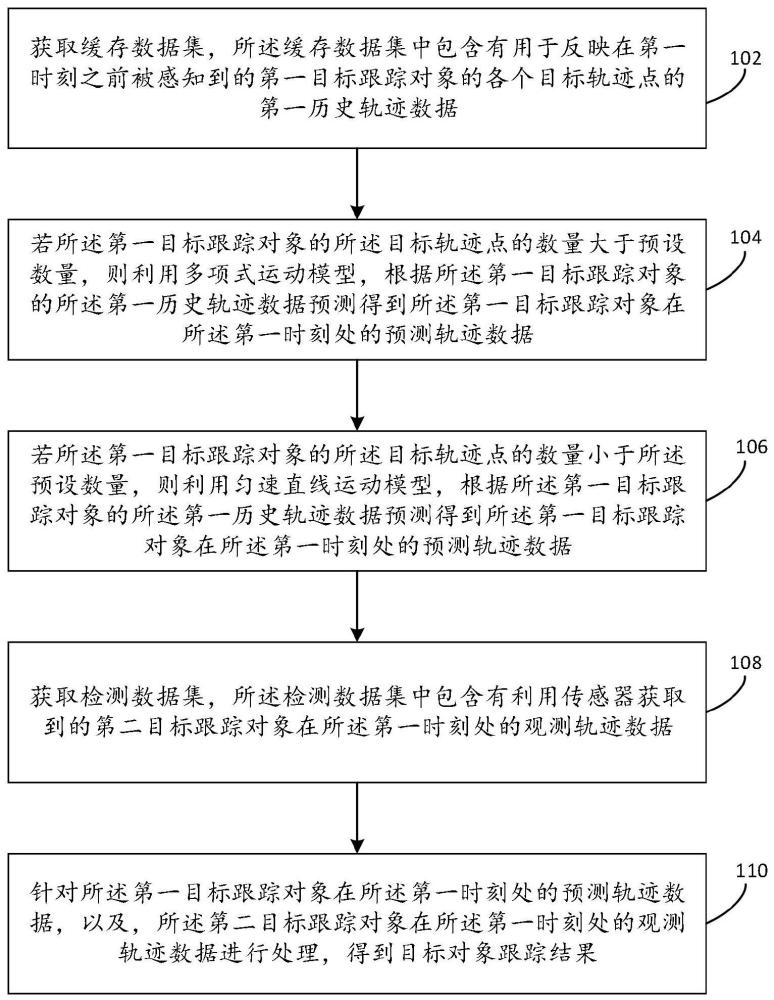
4、获取缓存数据集,所述缓存数据集中包含有用于反映在第一时刻之前被感知到的第一目标跟踪对象的各个目标轨迹点的第一历史轨迹数据;
5、若所述第一目标跟踪对象的所述目标轨迹点的数量大于预设数量,则利用多项式运动模型,根据所述第一目标跟踪对象的所述第一历史轨迹数据预测得到所述第一目标跟踪对象在所述第一时刻处的预测轨迹数据;
6、若所述第一目标跟踪对象的所述目标轨迹点的数量小于所述预设数量,则利用匀速直线运动模型,根据所述第一目标跟踪对象的所述第一历史轨迹数据预测得到所述第一目标跟踪对象在所述第一时刻处的预测轨迹数据;
7、获取检测数据集,所述检测数据集中包含有利用传感器获取到的第二目标跟踪对象在所述第一时刻处的观测轨迹数据;
8、针对所述第一目标跟踪对象在所述第一时刻处的预测轨迹数据,以及,所述第二目标跟踪对象在所述第一时刻处的观测轨迹数据进行处理,得到目标对象跟踪结果。
9、本说明书实施例提供的一种目标跟踪装置,所述装置可以包括:
10、第一获取模块,用于获取缓存数据集,所述缓存数据集中包含有用于反映在第一时刻之前被感知到的第一目标跟踪对象的各个目标轨迹点的第一历史轨迹数据;
11、第一处理模块,用于若所述第一目标跟踪对象的所述目标轨迹点的数量大于预设数量,则利用多项式运动模型,根据所述第一目标跟踪对象的所述第一历史轨迹数据预测得到所述第一目标跟踪对象在所述第一时刻处的预测轨迹数据;
12、第二处理模块,用于若所述第一目标跟踪对象的所述目标轨迹点的数量小于所述预设数量,则利用匀速直线运动模型,根据所述第一目标跟踪对象的所述第一历史轨迹数据预测得到所述第一目标跟踪对象在所述第一时刻处的预测轨迹数据;
13、第二获取模块,用于获取检测数据集,所述检测数据集中包含有利用传感器获取到的第二目标跟踪对象在所述第一时刻处的观测轨迹数据;
14、第三处理模块,用于针对所述第一目标跟踪对象在所述第一时刻处的预测轨迹数据,以及,所述第二目标跟踪对象在所述第一时刻处的观测轨迹数据进行处理,得到目标对象跟踪结果。
15、本说明书实施例提供的一种目标跟踪设备,包括:
16、至少一个处理器;以及,
17、与所述至少一个处理器通信连接的存储器;其中,
18、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够:
19、获取缓存数据集,所述缓存数据集中包含有用于反映在第一时刻之前被感知到的第一目标跟踪对象的各个目标轨迹点的第一历史轨迹数据;
20、若所述第一目标跟踪对象的所述目标轨迹点的数量大于预设数量,则利用多项式运动模型,根据所述第一目标跟踪对象的所述第一历史轨迹数据预测得到所述第一目标跟踪对象在所述第一时刻处的预测轨迹数据;
21、若所述第一目标跟踪对象的所述目标轨迹点的数量小于所述预设数量,则利用匀速直线运动模型,根据所述第一目标跟踪对象的所述第一历史轨迹数据预测得到所述第一目标跟踪对象在所述第一时刻处的预测轨迹数据;
22、获取检测数据集,所述检测数据集中包含有利用传感器获取到的第二目标跟踪对象在所述第一时刻处的观测轨迹数据;
23、针对所述第一目标跟踪对象在所述第一时刻处的预测轨迹数据,以及,所述第二目标跟踪对象在所述第一时刻处的观测轨迹数据进行处理,得到目标对象跟踪结果。
24、本说明书实施例提供的计算机可读介质,其上存储有计算机可读指令,所述计算机可读指令可被处理器执行以实现一种目标跟踪方法。
25、本说明书中至少一个实施例能够达到以下有益效果:
26、通过获取第一目标跟踪对象在第一时刻之前被感知到的各个目标轨迹点的第一历史轨迹数据;在目标轨迹点的数量小于预设数量时,利用匀速直线运动模型根据各个目标轨迹点处的第一历史轨迹数据预测第一目标跟踪对象在第一时刻处的预测轨迹数据;而在目标轨迹点的数量大于预设数量时,利用多项式运动模型根据各个目标轨迹点处的第一历史轨迹数据预测第一目标跟踪对象在第一时刻处的预测轨迹数据;由于第一目标跟踪对象在运动过程中并非进行匀速直线运动,利用多项式运动模型针对第一目标跟踪对象在第一时刻处的预测轨迹数据进行预测,充分考虑了第一目标跟踪对象在第一时刻之前的运动状态,从而能够提高预测轨迹数据的准确性;进而在利用传感器获取第二目标跟踪对象在第一时刻处的观测轨迹数据后,可以提高根据预测轨迹数据以及所述观测轨迹数据进行处理,得到的目标对象跟踪结果的准确性。
技术特征:
1.一种目标跟踪方法,其特征在于,所述方法包括:
2.根据权利要求1所述方法,其特征在于,所述获取检测数据集,具体包括:
3.根据权利要求2所述的方法,其特征在于,所述判断所述目标距离是否小于预设距离阈值,得到第一判断结果之后,还包括:
4.根据权利要求2或3所述方法,其特征在于,所述利用多项式运动模型,根据所述第一目标跟踪对象的所述第一历史轨迹数据预测得到所述第一目标跟踪对象在所述第一时刻处的预测轨迹数据,具体包括:
5.根据权利要求4所述方法,其特征在于,所述利用包含多项式运动模型系数的系数值的所述多项式运动模型,计算所述第一目标跟踪对象在所述第一时刻处的所述预测轨迹数据,相对于所述第一目标跟踪对象处于第一轨迹点处的第一历史轨迹数据的目标变化量之前,还包括:
6.根据权利要求2或3所述方法,其特征在于,所述利用匀速直线运动模型,根据所述第一目标跟踪对象的所述第一历史轨迹数据预测得到所述第一目标跟踪对象在所述第一时刻处的预测轨迹数据,具体包括:
7.根据权利要求2所述方法,其特征在于,所述确定所述第三位置坐标所属的所述第一目标跟踪对象与所述第二位置坐标所属的所述第二目标跟踪对象为同一个目标跟踪对象之后,还包括:
8.一种目标跟踪装置,其特征在于,所述装置包括:
9.一种目标跟踪设备,其特征在于,包括:
10.一种计算机可读介质,其上存储有计算机可读指令,所述计算机可读指令可被处理器执行以实现权利要求1至7中任一项所述的目标跟踪方法。
技术总结
本说明书实施例公开了一种目标跟踪方法、装置、设备以及计算机可读介质,包括:获取第一目标跟踪对象在第一时刻之前被感知到的各个目标轨迹点的第一历史轨迹数据;在目标轨迹点的数量小于预设数量时,利用匀速直线运动模型预测第一目标跟踪对象在第一时刻处的预测轨迹数据;而在目标轨迹点的数量大于预设数量时,利用多项式运动模型预测第一目标跟踪对象在第一时刻处的预测轨迹数据;以在第一目标跟踪对象进行非匀速直线运动时,提高预测轨迹数据的准确性;进而在利用传感器获取第二目标跟踪对象在第一时刻处的观测轨迹数据后,提高根据预测轨迹数据以及所述观测轨迹数据进行处理,得到的目标对象跟踪结果的准确性。
技术研发人员:饶晋
受保护的技术使用者:云控智行科技有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!