一种近信号区混合车群基元建模方法
本发明涉及混合交通场景下的建模领域,具体的,涉及一种近信号区混合车群基元建模方法。
背景技术:
1、随着信息及通信技术的快速发展及其在交通系统中的广泛应用,交通系统具有信息物理系统(cps)的典型特征。在交通信息物理系统(t-cps)中,利用车载通信设备,车与车、车与路侧设备可以通过通信交换数据。然而,交通的全面智能化和自动化不可能一蹴而就。在未来一段时间内,传统人驾车和自动驾驶车将在一段时间内共存,形成一类新型混合交通。近信号区指的是在道路交叉口上游受到信号灯调控影响的所有区域,它对于城市交通系统的正常运行起着重要作用。在这一区域内,车辆由于受信号灯周期性调控和车辆换道行为的影响,极易出现频繁加减速和启停现象,常常导致该区域发生交通拥堵,严重影响整体交通效率。由于新型混合交通中的异构车辆在信息获取的类型、范围和实时性上存在较大差异,需要结合近信号区交通场景,充分分析以cav为交通主体和以hv为交通主体的信息物理交互差异性,以构建能体现混合交通异质主体差异的理论模型为切入点,综合考虑异质车辆渗透率等因素影响,揭示近信号区混合交通条件下车辆协同行驶过程中信息因素及物理因素复杂交互的作用机理,为提高近信号交通效率提供新的途径。
2、通过查阅相关专利和论文发现,目前对于近信号区的研究主要在于网联环境下信号灯与车辆之间的协同控制,鲜有研究对网联环境下近信号区的交通现象进行建模。现有针对混合交通车辆微观行为的研究主要考虑单车道前后车对目标车辆跟驰行为的影响。然而,近信号区往往是多车道行驶场景,由于车辆的目标车道不同,在近信号区会发生强制换道现象,相邻车道的车辆对目标车辆纵向行驶行为有显著的影响。同时,近信号区信号灯也会对驾驶人的驾驶行为产生影响,决定车辆纵向行为的因素也不再是一维的。
3、针对以上问题,本发明以研究近信号区混合交通微观纵向行为为核心,为缓解近信号区交通问题提供理论支撑。本发明充分考虑cav与hv在信息、物理、信息物理交互方面的多维度差异性,揭示车辆行驶过程中cyber因素及物理因素复杂交互的作用机理,最终建立近信号区多车道下的混合交通信息物理基元模型。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种近信号区混合车群基元建模方法。本发明旨在解决现有方法不统一、重塑性差、复杂度高、难以协同建模验证的问题。
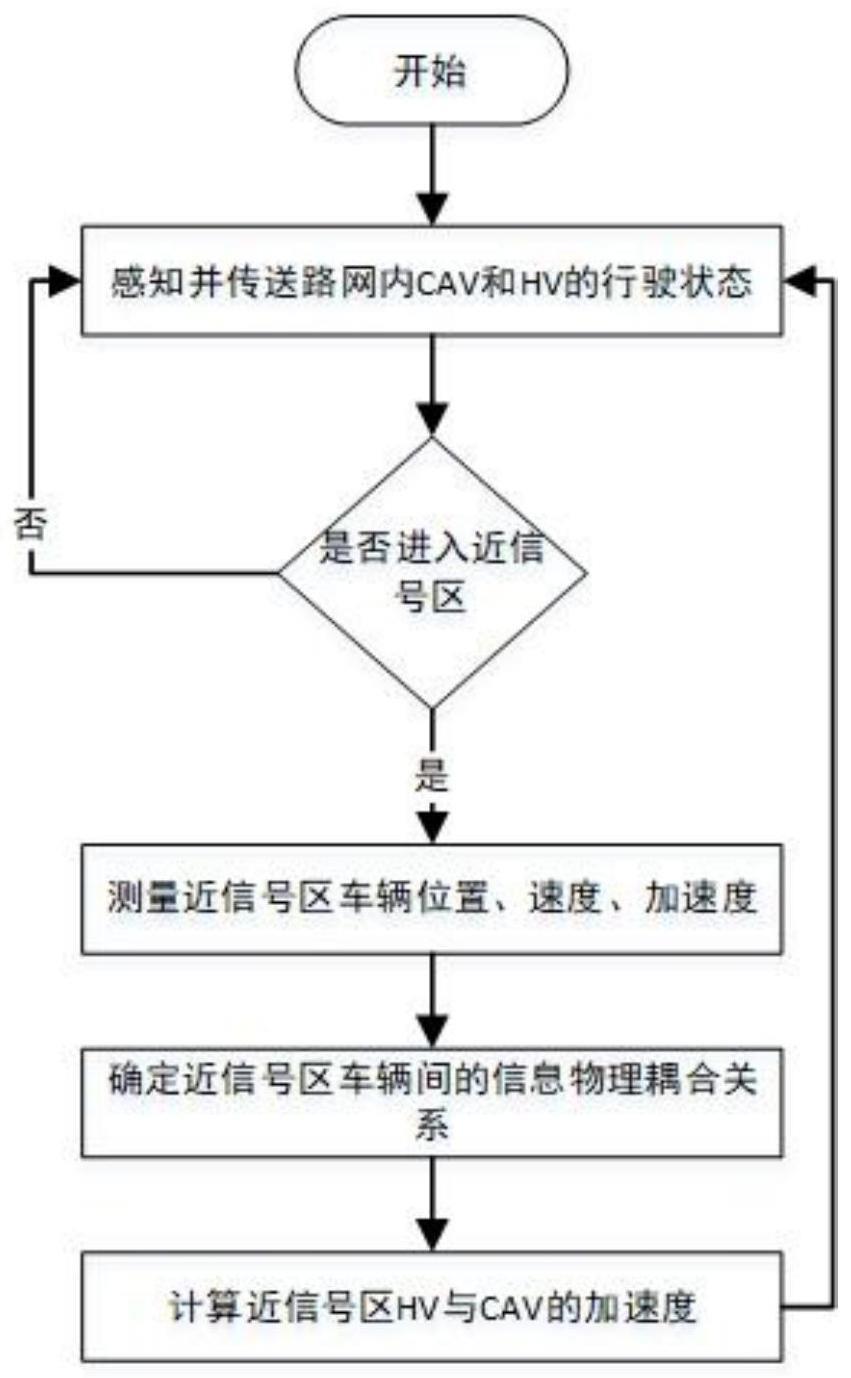
2、为达到上述目的,本发明提供了一种近信号区混合车群基元建模方法,包括以下步骤:
3、s1.利用路侧感知设备检测感知区内的车辆,从而获取网联自动车和人驾车的加速度、速度、位置信息;
4、s2.判断车辆是否进入近信号区,若是则转入步骤s3,否则转入步骤s1;
5、s3.将近信号区内的车辆视为物理空间和信息空间中的节点;
6、s4.判断近信号区的车辆类型,若是人驾车则转入步骤s5,若是网联自动车则转入步骤s6;
7、s5.根据步骤s1采集到的当前人驾车的周围车辆信息,建立近信号区人驾车基元模型;
8、s6.根据步骤s1采集到的当前网联自动车的车周围车辆信息,建立近信号区网联自动车基元模型;
9、s7.结合步骤s5和s6,建立近信号区混合车群基元模型。
10、进一步,所述步骤s1中,路侧感知设备的检测间隔时间为0.1秒~2秒。
11、进一步,所述步骤s3包括以下子步骤:
12、s3.1将车辆视为节点,第i辆车对第j辆车的影响看做从第i个节点到第j个节点的有向边,并用有向边的权重表示影响程度;
13、s3.2将车辆间的通信拓扑抽象为一个有向图。
14、进一步,所述步骤s3.2中,有向图表示为:g=(v,e,w);
15、v的计算表达式为:v={v1,v2,...,vn}
16、e的计算表达式为:
17、w的计算表达式为:w=[wnl]n×n
18、
19、wnl的计算表达式为:
20、
21、式中,v为有向图g中的节点集;vn为t时刻第n辆车的速度;e为有向图g中两两节点的边集;w表示权重集;wnl={0,1}表示节点n与节点l之间的通讯连接,wnl=0表示节点l对节点n没有影响,wnl=1表示节点l对节点n有影响;r为通讯距离;xn为第n辆车位置;x1为头车位置。
22、进一步,所述步骤s5包括以下子步骤:
23、s5.1考虑周边车对主车的影响,建立以人驾车为主车的基元模型aoh(t),所述以人驾车为主车的基元模型用于刻画周边车辆对目标车辆纵向行为的影响;
24、s5.2对于目标人驾车,计算由近信号区信号灯势场力产生的加速度asignal;
25、s5.3建立近信号区人驾车基元模型a’oh(t),模型描述如下:
26、a’oh(t)=aoh(t)-ψasignal
27、式中,ψ={0,1},ψ=0表示当前信号灯为绿灯相位,信号灯对人驾车没有影响,ψ=1表示当前信号灯为红灯相位,信号灯对人驾车产生一个斥力。
28、进一步,所述步骤s6包括以下子步骤:
29、s6.1对于在目标网联自动车通信范围内的相同车道车辆,计算相通车道车辆的基元模型;
30、s6.2多车道情况下,考虑周边车辆对目标网联自动车的影响,建立近信号区网联自动车基元模型aoc(t)。
31、进一步,所述步骤s7中,近信号区混合车群基元模型ao(t)的描述如下:
32、
33、式中,ξ={0,1},ξ=0表示目标车辆为网联自动车,ξ=1,表示目标车辆为传统人驾车;为车辆敏感系数,φ为信号灯敏感系数。
34、本发明的有益效果在于:
35、本发明公开了一种近信号区混合车群基元建模方法,以研究近信号区混合交通微观纵向行为为核心,充分考虑cav和hv在信息、物理、信息物理交互方面的多维度差异性,分别建立协同行驶模型。而后通过研究以上混合交通主体两两之间的耦合关系,获得混合交通异质主体间的信息物理交互作用机理,从而建立近信号区多车道混合交通下的信息物理基元模型,可为缓解近信号区交通问题提供理论支撑。
36、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究,对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:
1.一种近信号区混合车群基元建模方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种近信号区混合车群基元建模方法,其特征在于:所述步骤s1中,路侧感知设备的检测间隔时间为0.1秒~2秒。
3.根据权利要求1述的一种近信号区混合车群基元建模方法,其特征在于:所述步骤s3包括以下子步骤:
4.根据权利要求3所述的一种近信号区混合车群基元建模方法,其特征在于:所述步骤s3.2中,有向图表示为:g=(v,e,w);
5.根据权利要求4所述的一种近信号区混合车群基元建模方法,其特征在于:所述步骤s5包括以下子步骤:
6.根据权利要求5所述的一种近信号区混合车群基元建模方法,其特征在于:所述步骤s6包括以下子步骤:
7.根据权利要求6所述的一种近信号区混合车群基元建模方法,其特征在于:所述步骤s7中,近信号区混合车群基元模型ao(t)的描述如下:
技术总结
本发明公开了一种近信号区混合车群基元建模方法,包括以下步骤:利用路侧感知设备检测感知区内的车辆,从而获取网联自动车和人驾车的加速度、速度、位置信息;判断车辆是否进入近信号区;将近信号区内的车辆视为物理空间和信息空间中的节点;判断近信号区的车辆类型;根据采集到的当前人驾车的周围车辆信息,建立近信号区人驾车基元模型;根据采集到的当前网联自动车的车周围车辆信息,建立近信号区网联自动车基元模型;建立近信号区混合车群基元模型。本发明方法可建立近信号区多车道混合交通下的信息物理基元模型,可为缓解近信号区交通问题提供理论支撑。
技术研发人员:孙棣华,赵敏,梁勇康
受保护的技术使用者:重庆大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!