一种基于改进YOLOX-S的航拍图像小目标检测方法与流程
本发明涉及目标检测,更确切地说,它涉及一种基于改进yolox-s的航拍图像小目标检测方法。
背景技术:
1、航拍图像目标检测是对空中拍摄的俯视图像中的目标进行定位和分类的技术。随着计算机视觉技术和无人机技术的飞速发展,采用无人机搭载云台相机进行地面目标的检测与定位技术也得到了迅速的发展。由于无人机能够对目标采取主动式的检测、跟踪和定位,使其在侦查和导航上具有很大的优势,因此这项技术被广泛应用于电力巡检、野生动物监视、交通监控等民用领域。因此研究航拍图像目标检测技术具有十分重大的意义。
2、近年来,随着深度学习技术的迅速发展,航拍图像目标检测技术已经取得了重大的进步,如yolo、ssd、faster r-cnn等模型被用于航拍图像目标检测中,通过对大量的数据进行训练,这些模型能够快速、准确地识别和定位目标,具有较高的识别精度和实时性。
3、尽管航拍图像目标检测技术发展迅猛,复杂背景下的航拍图像小目标检测仍面临着许多挑战。目前的yolox-s算法在处理小目标检测时特征表达能力不足,导致检测效果不佳。而航拍图像通常易受背景干扰、背景复杂多变、目标占比小、目标尺度变化大,这些因素使得目标检测比较困难。特别是在小目标的检测方面,小目标常常隐藏在复杂的背景中,加之小目标的尺寸通常很小,容易被周围的干扰物所遮挡,这给目标检测带来了极大的困难。此外,小目标的对比度较低,往往与周围背景融为一体,难以被准确地检测和识别。
技术实现思路
1、本发明的目的是针对现有技术的不足,提出了一种基于改进yolox-s的航拍图像小目标检测方法。
2、第一方面,提供了基于改进yolox-s的航拍图像小目标检测方法,包括:
3、s1、改进型yolox-s网络模型训练;
4、s1包括:
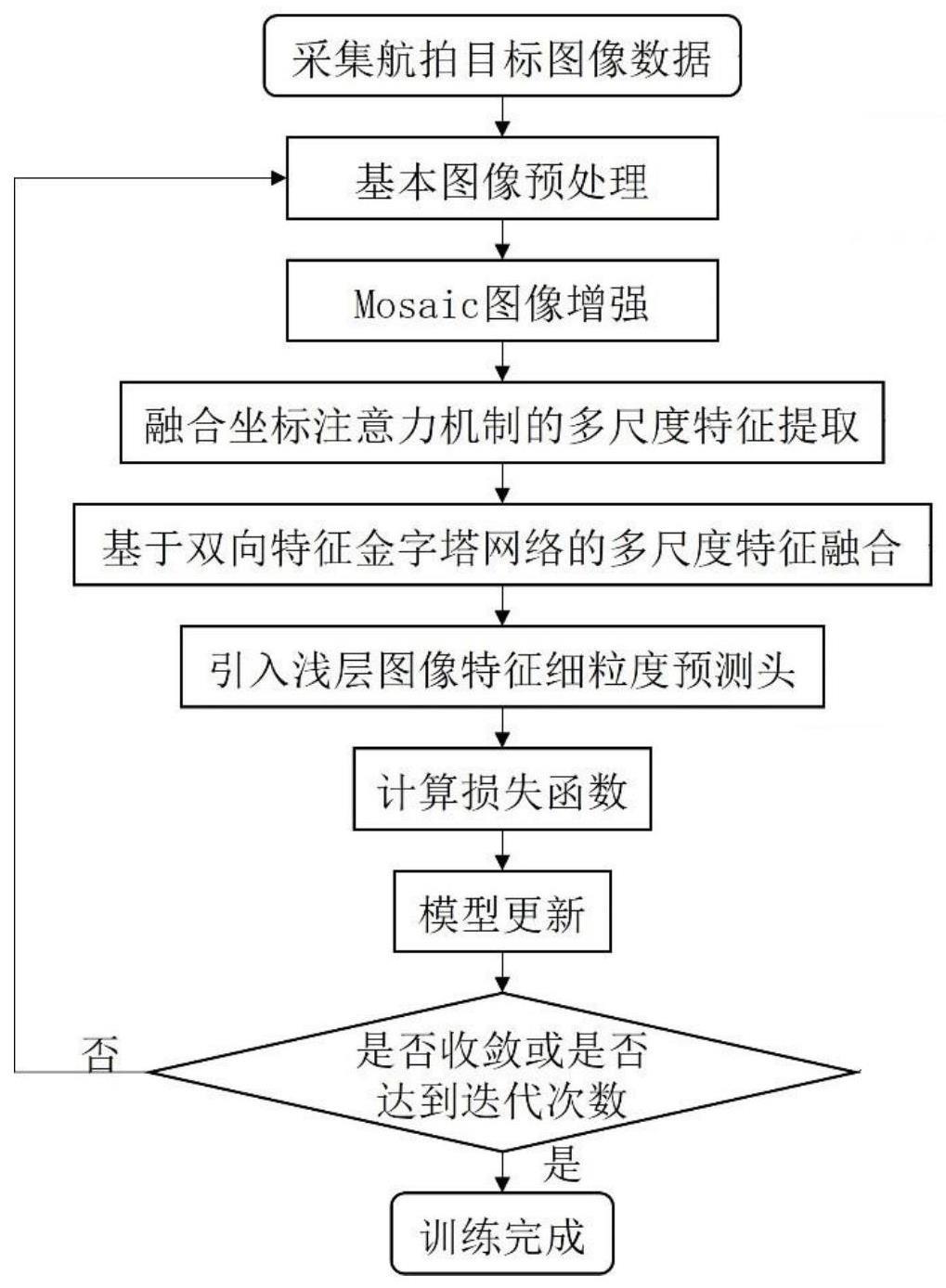
5、s101、采集航拍目标图像数据,构建数据集;所述数据集包括训练集、验证集和测试集;
6、s102、进行基本图像预处理和mosaic图像增强;
7、s103、进行融合坐标注意力机制的多尺度特征提取和基于双向特征金字塔网络的多尺度特征融合;
8、s104、进行神经网络训练,并计算损失函数,再进行模型更新;
9、s2、利用训练后的改进型yolox-s网络模型进行检测推理;
10、s2包括:
11、s201、向训练后的改进型yolox-s网络模型输入待检测航拍目标图像;
12、s202、进行图像特征提取与回归预测;
13、s203、对检测结果进行处理和输出。
14、作为优选,s103中,在主干特征提取网络融入对浅层级特征的进一步提取,并在yolox-s模型的各个卷积block处引入坐标注意力机制模块,使得模型在训练过程能够自适应的提取关键的前景目标信息,抑制背景信息。
15、作为优选,s103中,在检测头网络中新增了浅层图像特征细粒度预测头。
16、作为优选,s103中,yolox-s网络模型的颈部网络由fpn+pan结构替换为bifpn结构。
17、作为优选,s104中,训练过程采用交叉熵损失函数来计算类别损失,采用focalloss来计算置信度损失,采用eiou loss来计算预测框损失。
18、作为优选,s104中,前向传播完成后,采用梯度下降的方式对模型反向传播,更新模型的网络参数,若模型收敛或达到最大迭代数,将训练好的模型作为最终使用的模型;若模型未达到收敛或未达到最大迭代数,则继续执行模型训练过程。
19、作为优选,s202中,在特征提取与融合后,通过分类和回归分支对目标物体进行识别和位置预测,在分类分支中,利用softmax函数将特征映射到不同类别的概率上;在回归分支中,利用边界框回归的方式预测目标物体的位置信息,包括目标物体的中心坐标和宽高。
20、作为优选,s203包括:
21、s2031、合并多层检测头检测结果;
22、s2032、执行非极大值抑制;
23、s2033、解码检测结果,并进行输出。
24、第二方面,提供了一种基于改进yolox-s的航拍图像小目标检测系统,用于执行第一方面任一所述的基于改进yolox-s的航拍图像小目标检测方法,包括:
25、训练模块,用于改进型yolox-s网络模型训练;
26、训练模块包括:
27、采集单元,用于采集航拍目标图像数据,构建数据集;所述数据集包括训练集、验证集和测试集;
28、处理单元,用于进行基本图像预处理和mosaic图像增强;
29、提取单元,用于进行融合坐标注意力机制的多尺度特征提取和基于双向特征金字塔网络的多尺度特征融合;
30、训练单元,用于进行神经网络训练,并计算损失函数,再进行模型更新;
31、检测模块,用于利用训练后的改进型yolox-s网络模型进行检测推理;
32、检测模块包括:
33、输入单元,用于向训练后的改进型yolox-s网络模型输入待检测航拍目标图像;
34、预测单元,用于进行图像特征提取与回归预测;
35、输出单元,用于对检测结果进行处理和输出。
36、第三方面,提供了一种计算机存储介质,所述计算机存储介质内存储有计算机程序;所述计算机程序在计算机上运行时,使得计算机执行第一方面任一所述的基于改进yolox-s的航拍图像小目标检测方法。
37、本发明的有益效果是:本发明融入更浅层级的特征图,可以得到更丰富的特征信息,从而提高检测精度;将yolox-s模型颈部网络的fpn+pan结构替换为bifpn结构,显著减少模型参数量,实现更多层次特征的融合;引入注意力机制,使网络能够更加关注目标特征信息,忽略背景信息的干扰,从而提高小目标的检测准确率和精度;通过改善模型的预测框损失函数与置信度损失函数,可以加强模型对目标位置识别的能力。
技术特征:
1.一种基于改进yolox-s的航拍图像小目标检测方法,其特征在于,包括:
2.根据权利要求1所述的基于改进yolox-s的航拍图像小目标检测方法,其特征在于,s103中,在主干特征提取网络融入对浅层级特征的进一步提取,并在yolox-s模型的各个卷积block处引入坐标注意力机制模块,使得模型在训练过程能够自适应的提取关键的前景目标信息,抑制背景信息。
3.根据权利要求2所述的基于改进yolox-s的航拍图像小目标检测方法,其特征在于,s103中,在检测头网络中新增了浅层图像特征细粒度预测头。
4.根据权利要求3所述的基于改进yolox-s的航拍图像小目标检测方法,其特征在于,s103中,yolox-s网络模型的颈部网络由fpn+pan结构替换为bifpn结构。
5.根据权利要求4所述的基于改进yolox-s的航拍图像小目标检测方法,其特征在于,s104中,训练过程采用交叉熵损失函数来计算类别损失,采用focalloss来计算置信度损失,采用eiou loss来计算预测框损失。
6.根据权利要求5所述的基于改进yolox-s的航拍图像小目标检测方法,其特征在于,s104中,前向传播完成后,采用梯度下降的方式对模型反向传播,更新模型的网络参数,若模型收敛或达到最大迭代数,将训练好的模型作为最终使用的模型;若模型未达到收敛或未达到最大迭代数,则继续执行模型训练过程。
7.根据权利要求6所述的基于改进yolox-s的航拍图像小目标检测方法,其特征在于,s202中,在特征提取与融合后,通过分类和回归分支对目标物体进行识别和位置预测,在分类分支中,利用softmax函数将特征映射到不同类别的概率上;在回归分支中,利用边界框回归的方式预测目标物体的位置信息,包括目标物体的中心坐标和宽高。
8.根据权利要求7所述的基于改进yolox-s的航拍图像小目标检测方法,其特征在于,s203包括:
9.一种基于改进yolox-s的航拍图像小目标检测系统,其特征在于,用于执行权利要求1至8任一所述的基于改进yolox-s的航拍图像小目标检测方法,包括:
10.一种计算机存储介质,其特征在于,所述计算机存储介质内存储有计算机程序;所述计算机程序在计算机上运行时,使得计算机执行权利要求1至8任一所述的基于改进yolox-s的航拍图像小目标检测方法。
技术总结
本发明涉及一种基于改进YOLOX‑S的航拍图像小目标检测方法,包括采集航拍目标图像数据,构建数据集;进行基本图像预处理和Mosaic图像增强;进行融合坐标注意力机制的多尺度特征提取和基于双向特征金字塔网络的多尺度特征融合;进行神经网络训练,并计算损失函数,再进行模型更新;利用训练后的改进型YOLOX‑S网络模型进行检测推理。本发明的有益效果是:本发明融入更浅层级的特征图,可以得到更丰富的特征信息,从而提高检测精度;引入注意力机制,使网络能够更加关注目标特征信息,忽略背景信息的干扰,从而提高小目标的检测准确率和精度。
技术研发人员:刘珂,尚鹏辉,何龙,吴疆,周轶凡,牛犇,陈舜波
受保护的技术使用者:杭州智元研究院有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!