一种用于多飞行器集联操作的最优布局规划方法
本发明涉及无人机集群飞行领域和布局优化领域,更具体地说,本发明涉及一种用于多飞行器集联操作的最优布局规划方法。
背景技术:
1、在物流运输领域,无人机拥有巨大的发展潜力。基于城市的快速发展导致路面交通网络复杂,能够在提高物流效率的同时,缓解路面交通压力,实现对各种物品的快速、精准配送,节约了人力成本。
2、四旋翼无人机是一种最常见的多旋翼无人机类型,其使用四个旋翼的转速作为控制变量,来控制无人机在空间内的六个自由度,是一个高耦合欠驱动的动力学系统。四旋翼无人机除了具备一般多旋翼无人机的众多优势以外,还具有体积小、机动性强、易于控制等特点,在执行运输任务时,可以灵活、快速地穿梭于狭小复杂的地形,实现对目标物的精准投送。但是由于四旋翼无人机受到能量转换效率和自身推重比等因素的限制,其所能承受的负载有限,无法实现对大质量物体的运输,且续航能力较差。
3、鉴于此,本发明提供种一种用于多飞行器集联操作的最优布局规划方法。
技术实现思路
1、为了克服现有技术中的问题,本发明提出一种用于多飞行器集联操作的最优布局规划方法。
2、根据本发明的一个方面,提供了一种用于多飞行器集联操作的最优布局规划方法,其特征在于,包括以下步骤:
3、步骤s1:将多个无人机通过运动副集联成飞行平台系统,基于飞行平台系统构建多组合分离对接分布模型,基于多组合分离对接分布模型生成第一结构参数,所述第一结构参数包括运动副集联生成的若干参数变量;
4、步骤s2:随机提取n组第一结构参数,对n组第一结构参数进行非支配排序,将非支配排序后的n组第一结构参数标记为初始种群;
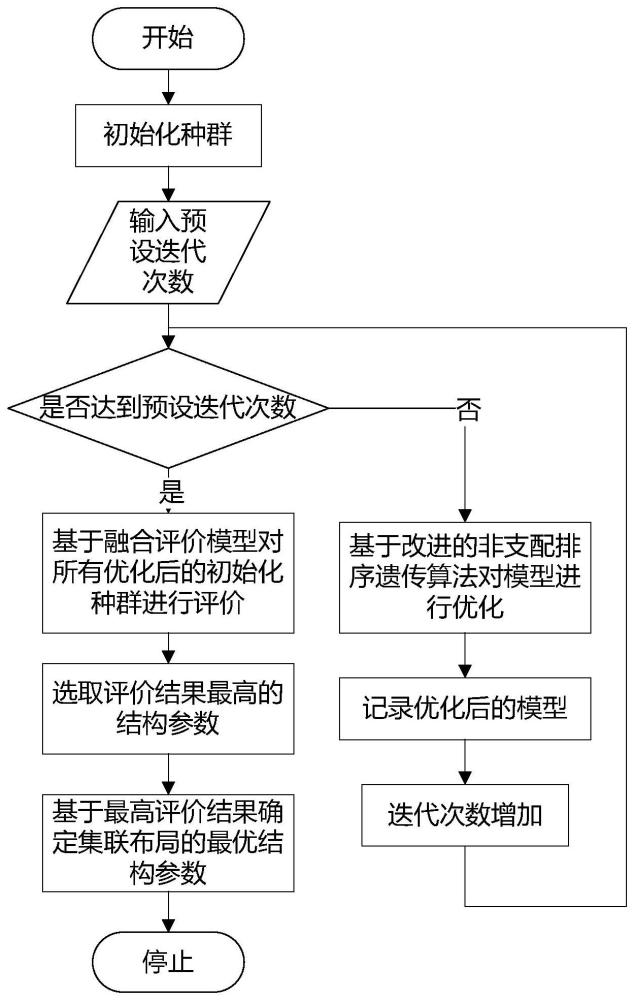
5、步骤s3:初始种群通过m次遗传算法模型进行迭代处理,其中m为预设迭代次数,并在每次迭代处理后通过非支配排序和拥挤度计算后的结果更新初始种群;
6、步骤s4:构建融合评价模型对初始种群进行评价,输出评价结果,并选取最高评价结果对应的结构参数,从而确定集联布局的最优结构参数。
7、在一个优选的实施方式中,所述第一结构参数的生成逻辑为:
8、运动副集联设计为多飞行器通过多个对接单元相连接,对接单元包括第一对接单元、第二对接单元和第三对接单元,第二对接单元和第三对接单元关于所述第一对接单元所在平面对称设置,将第二对接单元和第三对接单元与所述第一对接单元所在平面形成一个夹角。
9、在一个优选的实施方式中,非支配排序的具体步骤如下:
10、步骤s21:提取第i组第一结构参数,其中i=1,2,3…,n;基于第i组第一结构参数获得对应的第一目标函数和第二目标函数之和fi;
11、步骤s22:对于所有的n组第一结构参数中任意选取第j组第一结构参数,j=1,2,3…,n,且j≠i,基于第j组第一结构参数获得对应的第一目标函数和第二目标函数之和fj;
12、若不存在一个目标函数之和fj优于目标函数之和fi,则目标函数fi为非支配个体;
13、步骤s23:对n组第一结构参数内所有的第一结构参数都执行一次上述步骤s21-步骤s22,得到了所有第一结构参数的非支配个体;
14、步骤s24:根据n组第一结构参数的目标函数计算得出的值,对n组第一结构参数进行一次非支配排序,将完成一次非支配排序后第一结构参数标记为初始种群。
15、在一个优选的实施方式中,步骤s3的具体操作步骤:
16、步骤s31:获取初始种群,初始种群的预设迭代次数为m,m>0;定义初始种群对应的迭代次数m=1;
17、步骤s32:初始种群继续通过遗传算法模型进行处理,生成n组第二结构参数,所述第二结构参数为n组第一结构参数通过选择、交叉和变异后操作后的结构参数;
18、步骤s33:将n组第二结构参数与初始种群中n组第一结构参数进行合并,生成2n组第三结构参数,所述第三结构参数维所述第二结构参数和所述第一结构参数的累计之和;
19、步骤s34:将2n组第三结构参数通过非支配排序和拥挤度计算后提取前n组第三结构参数为第一子种群,根据所述第一子种群更新初始化种群,对应的第三结构参数更新为第一结构参数;
20、步骤s35:将初始种群对应的迭代次数与预设迭代次数进行比对分析,若m<m,则m=m+1,初始种群通过遗传算法模型进行迭代处理,重复步骤s31-步骤s34;
21、若m≥m,则结束迭代处理过程,输出更新后的初始种群。
22、在一个优选的实施方式中,所述遗传算法模型的处理逻辑为:
23、从初始化种群n组第一结构参数中随机选择第k组第一结构参数gk和第p组第一结构参数gp,且k=1,2,3…,n;p=1,2,3…,n,k≠p,n≥1;
24、将第一结构参数gk和第一结构参数gp中随机提取若干变量进行交叉互换,完成一次选择和交叉,形成第一结构交叉参数;
25、基于第一结构交叉参数,对第一结构交叉参数中随机提取若干变量,加上随机值,完成一次选择和变异,形成第一结构变异参数;将第一结构变异参数标记为第二结构参数。
26、在一个优选的实施方式中,拥挤度计算的具体步骤为:
27、2n组第三结构参数中每一个第三结构参数q的拥挤度为dq定义为0;
28、对2n组第三结构参数进行非支配排序,获得非支配排序后前n组第三结构参数,将非支配排序后的两端边界对应第三结构参数的拥挤度定义为为无穷;
29、对非支配排序后非边界的第三结构参数通过公式计算拥挤度,根据拥挤度对非支配排序后非边界的第三结构参数再次重新排序,将重新排序的第三结构参数更新为第一结构参数。
30、在一个优选的实施方式中,所述融合评价模型包括空间评价函数和超体积指标函数,基于所述融合评价模型生成的融合评价的结果。
31、根据本发明的另一个方面,一种电子设备,包括:处理器和存储器,其中,所述存储器中存储有可供处理器调用的计算机程序;
32、所述处理器通过调用所述存储器中存储的计算机程序,执行上述一种用于多飞行器集联操作的最优布局规划方法。
33、本发明一种用于多飞行器集联操作的最优布局规划方法的技术效果和优点:
34、本发明将多个四旋翼无人机通过动力模型集联成空间布局飞行平台的方式,有效地扩大无人机运输的接触力面积,从而弥补单个四旋翼无人机负载小、欠驱动的缺点,实现对质量较大的物体的运输,直接决定了集联体的负载能力和空间通过能力,以满足多任务场景下的多无人机运输需求,极大地提高四旋翼无人机的适应需求和灵活运用能力。
技术特征:
1.一种用于多飞行器集联操作的最优布局规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种用于多飞行器集联操作的最优布局规划方法,其特征在于,所述第一结构参数的生成逻辑为:
3.根据权利要求2所述的一种用于多飞行器集联操作的最优布局规划方法,其特征在于,非支配排序的具体步骤如下:
4.根据权利要求3所述的一种用于多飞行器集联操作的最优布局规划方法,其特征在于,步骤s3的具体操作步骤:
5.根据权利要求4所述的一种用于多飞行器集联操作的最优布局规划方法,其特征在于,所述遗传算法模型的处理逻辑为:
6.根据权利要求5所述的一种用于多飞行器集联操作的最优布局规划方法,其特征在于,拥挤度计算的具体步骤为:
7.根据权利要求6所述的一种用于多飞行器集联操作的最优布局规划方法,其特征在于,所述融合评价模型包括空间评价函数和超体积指标函数,基于所述融合评价模型生成的融合评价的结果。
8.一种电子设备,其特征在于,包括:处理器和存储器,其中,所述存储器中存储有可供处理器调用的计算机程序;
技术总结
本发明属于无人机集群飞行领域和布局优化领域,本发明公开了一种用于多飞行器集联操作的最优布局规划方法,基于多组合分离对接分布模型,随机产生N组第一结构参数,对N组第一结构参数进行非支配排序,将非支配排序后的N组第一结构参数标记为初始种群;初始种群通过M次遗传算法模型进行迭代处理,并在每次迭代处理后通过非支配排序和拥挤度计算后的结果更新初始种群;构建融合评价模型对初始种群进行评价,输出评价结果,并选取最高评价结果对应的结构参数,从而确定集联布局的最优结构参数。
技术研发人员:汤奇荣,朱维,崔远哲,沈逸超,王炳正,张以恒
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!