一种用于红外图像中舰船关键部位的智能识别方法
本发明涉及舰船关键部位智能识别领域,尤其涉及一种用于红外图像中舰船关键部位的智能识别方法。
背景技术:
1、随着高新技术的迅猛发展,海上作战形式正在不断演变,智能化、小型化、无人化和精确化已经成为海上作战的趋势。然而,仅仅依靠目标跟踪点进行攻击可能无法对目标舰船造成毁灭性打击,所以有必要对舰船图像进行处理,以识别出舰船的舰岛、烟囱等关键部位作为攻击目标。由于红外探测具有良好的隐蔽性、被动探测、较强的抗干扰能力以及可全天候等优点,逐渐成为海上防御系统和作战系统中重要的装备。因此,舰船目标的红外特性成为舰船目标监视和跟踪方面重要的研究内容。红外图像技术已经在舰船目标检测和识别方面得到广泛应用,其可以在夜间或低光条件下获取目标信息,并且可以识别传统可见光图像无法检测到的热源,尤其是在复杂天气和海况下,可见光图像受到限制时,红外图像在舰船目标识别中具有独特的优势。
2、近年来,基于目标红外图像的智能识别算法作为红外目标探测的关键技术已成为研究重点,该方法主要分为两大类:一类是从红外图像中提取目标舰船的特征,根据提取的特征实现目标的识别;另一类是应用模板进行匹配,根据匹配结果进行目标识别。但由于红外图像不具备丰富的颜色信息且存在较强的噪声,所以当这两类方法在应用在对算法识别准确率识别率以及鲁棒性要求更高的红外舰船的关键部位识别时,其性能显著下降。
技术实现思路
1、本发明提供一种用于红外图像中舰船关键部位的智能识别方法,以克服上述技术问题。
2、一种用于红外图像中舰船关键部位的智能识别方法,包括,
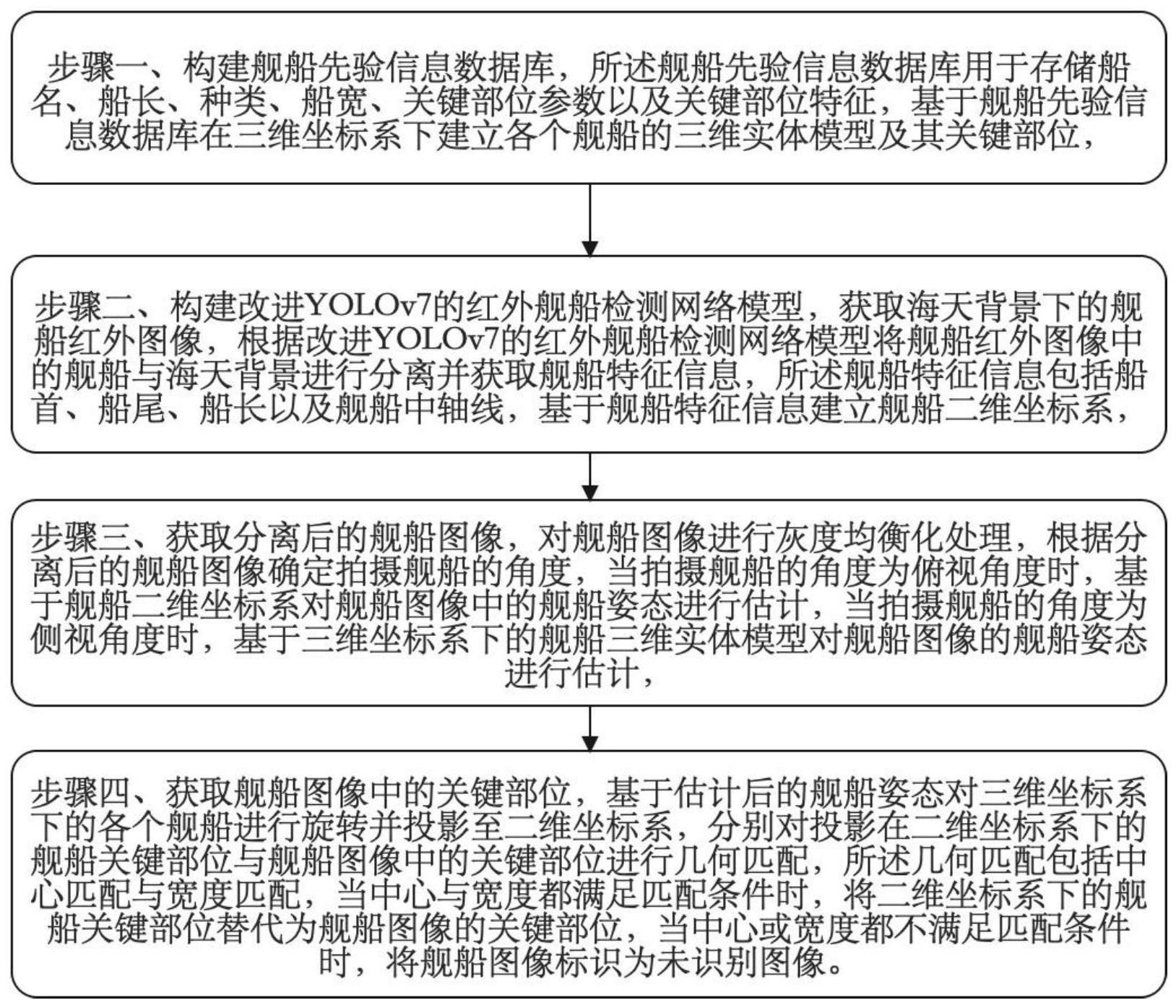
3、步骤一、构建舰船先验信息数据库,所述舰船先验信息数据库用于存储船名、船长、种类、船宽、关键部位参数以及关键部位特征,基于舰船先验信息数据库在三维坐标系下建立各个舰船的三维实体模型及其关键部位,
4、步骤二、构建改进yolov7的红外舰船检测网络模型,获取海天背景下的舰船红外图像,根据改进yolov7的红外舰船检测网络模型将舰船红外图像中的舰船与海天背景进行分离并获取舰船特征信息,所述舰船特征信息包括船首、船尾、船长以及舰船中轴线,基于舰船特征信息建立舰船二维坐标系,
5、步骤三、获取分离后的舰船图像,对舰船图像进行灰度均衡化处理,根据分离后的舰船图像确定拍摄舰船的角度,当拍摄舰船的角度为俯视角度时,基于舰船二维坐标系对舰船图像中的舰船姿态进行估计,当拍摄舰船的角度为侧视角度时,基于三维坐标系下的舰船三维实体模型对舰船图像的舰船姿态进行估计,
6、步骤四、获取舰船图像中的关键部位,基于估计后的舰船姿态对三维坐标系下的各个舰船进行旋转并投影至二维坐标系,分别对投影在对二维坐标系下的舰船关键部位与舰船图像中的关键部位进行几何匹配,所述几何匹配包括中心匹配与宽度匹配,当中心与宽度都满足匹配条件时,将二维坐标系下的舰船关键部位替代为舰船图像的关键部位,当中心或宽度都不满足匹配条件时,将舰船图像标识为未识别图像。
7、优选地,所述构建改进yolov7的红外舰船检测网络模型包括在yolov7检测网络模型中增加红外图像预处理模块,将卷积核替换为可变形卷积,增加坐标注意力模块,并使用eiou作为损失函数。
8、优选地,所述红外图像预处理模块包括图像分解、图像去噪以及图像重建三个子模块,所述图像分解子模块用于根据mallat分解算法对红外图像进行逐层分解,所述图像去噪子模块用于根据haar小波和自适应阈值选取算法对分解后的红外图像进行去噪,所述图像重建子模块用于根据mallat重构算法对去噪后的红外图像进行重建。
9、优选地,所述分别对投影在对二维坐标系下的舰船关键部位与舰船图像中的关键部位进行几何匹配包括分别将二维坐标系下的舰船关键部位与舰船图像中的关键部位近似表示为矩形,根据公式(1)判断二维坐标系下的舰船关键部位与舰船图像中的关键部位是否匹配,若满足公式(1),将二维坐标系下的舰船关键部位替代为舰船图像的关键部位,当不满足公式(1),将舰船图像标识为未识别图像,
10、
11、其中,二维坐标系下的舰船关键部位在舰船中的几何中心坐标为p(x1,y1),舰船图像中的关键部位几何中心坐标为p1(x2,y2),二维坐标系下的舰船关键部位在图像中的几何中心坐标为p2(x1cosθ,y1sinθ),θ为偏移角,舰船宽度r=a1,舰船图像中关键部位的宽度为r1=a2,二维坐标系下的舰船关键部位在图像中的宽度为:r2=a1cosθ,ε1为几何中心偏差、ε2为宽度偏差。
12、优选地,所述对舰船图像进行灰度均衡化处理包括根据公式(2)进行灰度均衡化处理,
13、
14、式中,t为灰度连续的舰船图像;j为像素灰度级;lj为均衡化后的灰度级分布。
15、本发明提供一种用于红外图像中舰船关键部位的智能识别方法,构建舰船先验信息数据库,并通过深度学习从红外图像中获取舰船目标检测类别,根据检测结果与舰船先验信息数据库进行几何匹配,实现智能化、自动化地提取海上特定舰船目标的关键部位。该技术不仅可以快速准确分析处理积累的大量历史图像数据,还可以应用于海面目标的实时侦察过程中,进行快速监测,大大减轻了图像分析人员的工作负担、提高工作效率。
技术特征:
1.一种用于红外图像中舰船关键部位的智能识别方法,其特征在于,包括,
2.根据权利要求1所述的一种用于红外图像中舰船关键部位的智能识别方法,其特征在于,所述构建改进yolov7的红外舰船检测网络模型包括在yolov7检测网络模型中增加红外图像预处理模块,将卷积核替换为可变形卷积,增加坐标注意力模块,并使用eiou作为损失函数。
3.根据权利要求2所述的一种用于红外图像中舰船关键部位的智能识别方法,其特征在于,所述红外图像预处理模块包括图像分解、图像去噪以及图像重建三个子模块,所述图像分解子模块用于根据mallat分解算法对红外图像进行逐层分解,所述图像去噪子模块用于根据haar小波和自适应阈值选取算法对分解后的红外图像进行去噪,所述图像重建子模块用于根据mallat重构算法对去噪后的红外图像进行重建。
4.根据权利要求1所述的一种用于红外图像中舰船关键部位的智能识别方法,其特征在于,所述分别对投影在二维坐标系下的舰船关键部位与舰船图像中的关键部位进行几何匹配包括分别将二维坐标系下的舰船关键部位与舰船图像中的关键部位近似表示为矩形,根据公式(1)判断二维坐标系下的舰船关键部位与舰船图像中的关键部位是否匹配,若满足公式(1),将二维坐标系下的舰船关键部位替代为舰船图像的关键部位,当不满足公式(1),将舰船图像标识为未识别图像,
5.根据权利要求1所述的一种用于红外图像中舰船关键部位的智能识别方法,其特征在于,所述对舰船图像进行灰度均衡化处理包括根据公式(2)进行灰度均衡化处理,
技术总结
本发明公开了一种用于红外图像中舰船关键部位的智能识别方法,包括构建舰船先验信息数据库,基于舰船先验信息数据库在三维坐标系下建立各个舰船的三维实体模型及其关键部位,构建改进YOLOv7的红外舰船检测网络模型,获取舰船红外图像,根据模型将舰船红外图像中的舰船与海天背景进行分离并获取舰船特征信息,基于舰船特征信息建立舰船二维坐标系,获取分离后的舰船图像,对舰船图像进行灰度均衡化处理,对舰船图像中的舰船姿态进行估计,获取舰船图像中的关键部位,对二维坐标系下的舰船关键部位与舰船图像中的关键部位进行几何匹配并获取匹配结果。本发明实现了智能化、自动化地提取海面目标的关键部位,在与海面目标的实时侦察过程中进行快速监测。
技术研发人员:马宝山,修鹏,侯亚星,王嘉智,史晓非,陈伟力,高宗江
受保护的技术使用者:大连海事大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!