利用高频信号检测饱和点的自适应条纹方法与流程
本发明属于三维重建,具体涉及利用高频信号检测饱和点的自适应条纹方法。
背景技术:
1、结构光三维成像技术是一种主动非接触式光学三维成像技术,相位测量轮廓术(phase measuring profilometry, pmp)是常用的结构光三维成像技术之一,因其成像精度、速度、成本等优势,被广泛应用于诸多行业。
2、pmp三维重建系统主要由相机、投影机以及计算机组成,投影机将预先设定好的正弦变形条纹图案投射到被测物体表面,相机则负责将变形条纹捕获回来,最后由计算机通过解相位生成三维点云重建出被测物体表面轮廓。如果采集到的变形条纹光强的光强值超过相机的量化范围则会引起光强饱和、产生饱和误差,产生饱和误差的点称为饱和点。所以准确地检测出饱和点并且避免出现光强饱和可以有效提高高反光物体的三维重建精度。在自适应条纹法中,一般是向被测高反光物体投影均匀灰度图案,将相机捕获回来的图案作为检测饱和点的参考图案,当参考图案的光照强度达到设定的饱和阈值时,则判断为饱和点。传统的饱和点检测方法忽略了实际情况下条纹图案中明暗变化区域对饱和点的影响,这种影响称为多路径效应,即每个像素点的光强信息会包含其领域内 mn-1个像素点的光强信息。为此,在对表面反射率高的类镜面物体进行三维重建时,会因为光强饱和引起饱和误差,重建精度低。
3、因此,本发明提出一种利用高频信号检测饱和点的自适应条纹方法,以至少解决上述部分技术问题。
技术实现思路
1、本发明要解决的技术问题是:提供利用高频信号检测饱和点的自适应条纹方法,以至少解决上述部分技术问题。
2、为实现上述目的,本发明采用的技术方案如下:
3、利用高频信号检测饱和点的自适应条纹方法,包括:
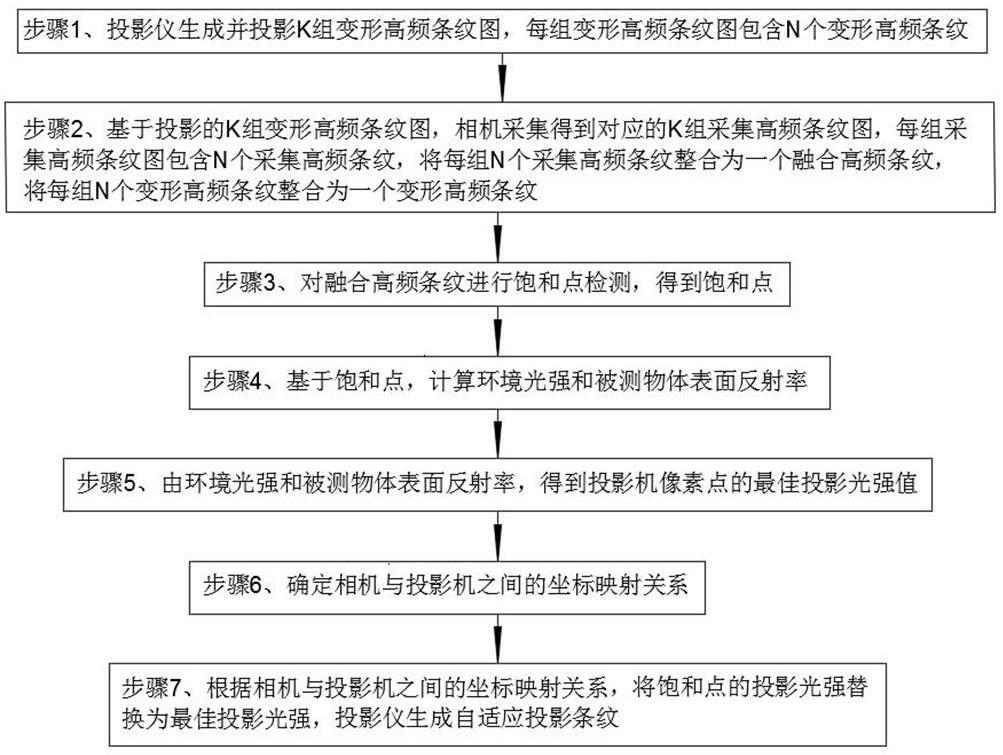
4、步骤1、投影仪生成并投影 k组变形高频条纹图,每组变形高频条纹图包含 n个变形高频条纹;
5、步骤2、基于投影的 k组变形高频条纹图,相机采集得到对应的 k组采集高频条纹图,每组采集高频条纹图包含 n个采集高频条纹,将每组 n个采集高频条纹整合为一个融合高频条纹,将每组 n个变形高频条纹整合为一个变形高频条纹;
6、步骤3、对融合高频条纹进行饱和点检测,得到饱和点;
7、步骤4、基于饱和点,计算环境光强和被测物体表面反射率;
8、步骤5、由环境光强和被测物体表面反射率,得到投影机像素点的最佳投影光强值;
9、步骤6、确定相机与投影机之间的坐标映射关系;
10、步骤7、根据相机与投影机之间的坐标映射关系,将饱和点的投影光强替换为最佳投影光强,投影仪生成自适应投影条纹。
11、进一步地,在所述步骤1中,采用编码方法生成k组变形高频条纹图,每个变形高频条纹的光强值的编码方法为:,式中:为投影图片的高度,为投影机纵坐标,t为相机的最大量化值,为变形高频条纹组的组序号,, n为相移索引, n为相移总数, n=0,1,2,3,..., n-1,是相邻两组变形高频条纹图间的光强差,为变形高频条纹的最高频率。
12、进一步地,在所述步骤2中,采用图像融合方法,将每组 n个采集高频条纹的光强值整合为一个融合高频条纹的光强值,图像融合方法为:,式中:表示取集合的最大值。
13、进一步地,在所述步骤2中,将每组n个变形高频条纹的光强值整合为一个变形高频条纹的光强值,。
14、进一步地,在所述步骤3中,对融合高频条纹的光强值行饱和点检测,得到饱和点,饱和点检测的方法为:,式中:等于1表示为饱和,等于0表示不饱和,t为相机的最大量化值。
15、进一步地,在所述步骤4中,利用饱和点构建联立方程组,计算环境光强和被测物体表面反射率,联立方程组为:,式中:需满足和均为0,为1。
16、进一步地,在所述步骤5中,最佳投影光强值的计算方法为:,式中:249为设定的光强饱和阈值。
17、进一步地,在所述步骤6中,通过向被测物体表面投影低光强的双向相移条纹建立相机与投影机的坐标映射关系,相机与投影机的坐标映射关系为:,式中:为投影机横坐标,为投影机纵坐标,为相机垂直方向的绝对相位,为相机水平方向的绝对相位,为相机横坐标,为相机纵坐标,为投影图片的高度,为投影图片的宽度。
18、与现有技术相比,本发明具有以下有益效果:
19、本发明采用投影高频条纹图案而不是均匀灰度图案作为检测饱和点,其次基于检测饱和点联立求解出被测物体表面反射率和环境光,再计算出最佳投影光强值,然后结合相机与投影机的坐标映射关系逐像素点改变投影光强值生成一组自适应投影条纹。利用本发明生成的自适应条纹进行物体的解相位和三维重建,提高了三维重建精度,具有更高信噪比。
技术特征:
1.利用高频信号检测饱和点的自适应条纹方法,其特征在于,包括:
2.根据权利要求1所述的利用高频信号检测饱和点的自适应条纹方法,其特征在于,在所述步骤1中,采用编码方法生成k组变形高频条纹图,每个变形高频条纹的光强值的编码方法为:,式中:为投影图片的高度,为投影机纵坐标,t为相机的最大量化值,为变形高频条纹组的组序号,,n为相移索引,n为相移总数,n=0,1,2,3,...,n-1,是相邻两组变形高频条纹图间的光强差,为变形高频条纹的最高频率。
3.根据权利要求2所述的利用高频信号检测饱和点的自适应条纹方法,其特征在于,在所述步骤2中,采用图像融合方法,将每组n个采集高频条纹的光强值整合为一个融合高频条纹的光强值,图像融合方法为:,式中:表示取集合的最大值。
4.根据权利要求3所述的利用高频信号检测饱和点的自适应条纹方法,其特征在于,在所述步骤2中,将每组n个变形高频条纹的光强值整合为一个变形高频条纹的光强值,。
5.根据权利要求4所述的利用高频信号检测饱和点的自适应条纹方法,其特征在于,在所述步骤3中,对融合高频条纹的光强值行饱和点检测,得到饱和点,饱和点检测的方法为:,式中:等于1表示为饱和,等于0表示不饱和,t为相机的最大量化值。
6.根据权利要求5所述的利用高频信号检测饱和点的自适应条纹方法,其特征在于,在所述步骤4中,利用饱和点构建联立方程组,计算环境光强和被测物体表面反射率,联立方程组为:,式中:需满足和均为0,为1。
7.根据权利要求6所述的利用高频信号检测饱和点的自适应条纹方法,其特征在于,在所述步骤5中,最佳投影光强值的计算方法为:,式中:249为设定的光强饱和阈值。
8.根据权利要求6所述的利用高频信号检测饱和点的自适应条纹方法,其特征在于,在所述步骤6中,通过向被测物体表面投影低光强的双向相移条纹建立相机与投影机的坐标映射关系,相机与投影机的坐标映射关系为:,式中:为投影机横坐标,为投影机纵坐标,为相机垂直方向的绝对相位,为相机水平方向的绝对相位,为相机横坐标,为相机纵坐标,为投影图片的高度,为投影图片的宽度。
技术总结
本发明公开了利用高频信号检测饱和点的自适应条纹方法,解决了传统饱和点检测方法忽略了多路径效应对饱和点的影响进而信噪比大、重建结果不准确的问题。本发明采用投影高频条纹图案而不是均匀灰度图案作为检测饱和点,其次基于检测饱和点联立求解出被测物体表面反射率和环境光,再计算出最佳投影光强值,然后结合相机与投影机的坐标映射关系逐像素点改变投影光强值生成一组自适应投影条纹。利用本发明生成的自适应条纹进行物体的三维重建,提高了三维重建精度,具有更高信噪比。
技术研发人员:郑晓军,张文谦,胡翠微,胡子阳
受保护的技术使用者:四川省产品质量监督检验检测院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!